 合成孔徑成像的原理及發展
合成孔徑成像的原理及發展

一、引言
合成孔徑成像自20世紀50年代提出,應用于雷達成像,歷經70年的研發,已經日趨成熟,成功地用于環境資源監測、災害監測、海事管理及軍事等領域。受物理環境制約,合成孔徑在聲吶成像中的研發與應用起步稍遲,滯后于雷達,近年來在民用及軍事領域的研究與應用進展加速。此外,近年來合成孔徑成像在聲學無損檢測、醫學超聲成像等領域的研發也有長足進步,并擴展到其他領域如光學、微波成像等。本文簡要介紹了條帶合成孔徑成像的原理及其在雷達、聲吶、無損檢測及醫學影像等方面的應用及發展。
二、合成孔徑成像原理
條帶合成孔徑成像利用小孔徑基陣,在直線運動軌跡上均速移動,并在確定位置順序發射,接收并存儲回波信號。根據空間位置和相位關系對不同位置的回波信號進行相干疊加處理,合成虛擬大孔徑的基陣,從而獲得沿運動方向的高分辨率。
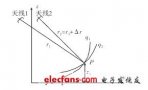
在1985年的先驅獎故事中,合成孔徑雷達(SAR)的發明者Wiley謙遜地說:我有幸想到了一個基本想法,我稱之為多普勒波束銳化(DBS),而不是合成孔徑雷達。和所有信號處理一樣,有一個雙重理論:一個是頻域解釋,這是多普勒分析;在時域內分析系統,這就是合成孔徑雷達。在時間域對合成孔徑成像的“合成陣列”的解釋如圖1所示。
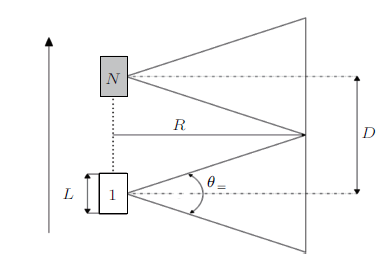
圖1合成陣列原理
其中,陣元或天線水平長度為L,水平波束開角為θ==λ/L。工作頻率時,波長為λ。陣元行進軌跡為直線,點目標與行進軌跡的垂直距離為R。陣元在位置1時,目標進入波束;陣元在位置N時,目標退出波束。合成孔徑陣元數為N,合成孔徑長為D=R×θ==R×λ/L,合成孔徑波束開角為θsyn=λ/D=λ/(R×(λ/L))=L/R。
采樣結束,合成孔徑波束形成后處理時,對不同位置的回波信號進行相干疊加,需要計算陣元發射信號至目標、目標反射信號返回陣元的往返聲程2R。因此,合成孔徑波束開角實際應為θsyn=λ/2D=λ/(2R×(λ/L))=L/2R。距直線軌跡垂直距離為R時,合成孔徑波束形成的線分辨率為δsyn=R×θsyn=R×L/2R=L/2。
20世紀50年代在雷達成像中提出“合成孔徑”原理時,稱為“多普勒波束銳化”。這時在頻率域對合成孔徑成像的解釋如圖2所示。
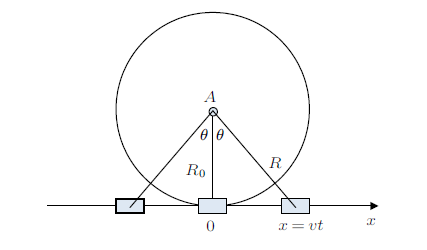
圖2多普勒頻移原理
實孔徑為D的雷達天線或聲吶換能器陣元沿x軸自左至右勻速運行,發射并接收位于A的點目標的回波信號。陣元速度為v,在x軸上位置為x=vt。
回波信號的多普勒頻移為
fd=2v/λ×sinθ≈2v/λtanθ=2v/(R0λ)x=2v2/(R0λ)t ⑴
多普勒頻移變化率μ=dfd/dt=2v2/R0λ,點目標進入并退出波束的持續時間為T=(R0λ/Dv)×c,回波信號的多普勒帶寬為Bd=Tμ=2v/D。
因此,合成孔徑線分辨率為
δsa=v/Bd=D/2 ⑵
極限情況:θmax=π/2,fmax=2v/λ,Bmax=4v/λ。
合成孔徑極限分辨率為
δmax=v/Bd=λ/4 ⑶
三、合成孔徑雷達的發展
1951年,美國Goodyear公司的Wiley首先提出用頻率分析方法改善雷達角分辨率,此概念最先應用在射電天文學及雷達成像。
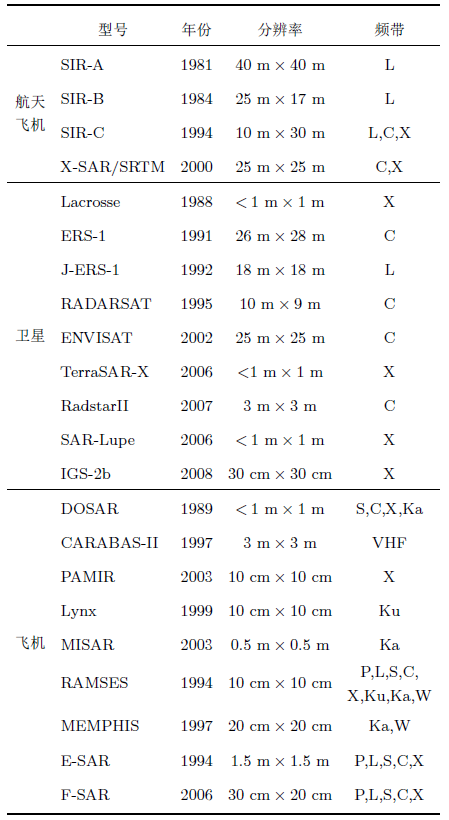
數個月后,美國伊利諾依大學及密歇根大學的研究人員獨立研發了SAR。密歇根大學的研究人員于1957年給出了最早的合成孔徑圖像。但是,由于圖像質量及分辨率都不高,當時幾乎取消了SAR的研究計劃。當時的分辨率指標是約16m,現在已經進入了SAR的興盛時期。表1給出了系統常用頻率及波長范圍,表2列出一些星載及機載SAR成像雷達的參數。
表1SAR系統常用頻率及波長范圍
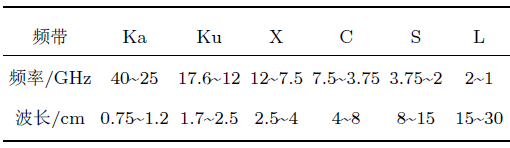
注:L、C及X是最常用的頻帶。P及L頻帶用于葉簇穿透、地表下成像以及生物量估計;C、S及X頻帶用于海洋、冰層及沉陷監測;X及Ku頻帶用于積雪監測;X及Ka用于高分辨率成像。
表2一些星載及機載SAR成像雷達的參數
四、合成孔徑(側掃)聲吶的發展
海洋占據地球表面約70%的面積,是人類開展交通運輸、軍事斗爭和獲取資源的場所。這就必須有在海洋中觀測、通訊、導航、定位的工具。在海洋中可檢測很多物理場,如:磁場、水壓場、尾流場、溫度場等。這此物理場的可檢測距離大致與源本身尺度同一量級,不能在水中遠距離傳遞信息。而水聲技術在其中扮演了重要的角色。聲波是迄今為止在水中唯一能有效地遠距離傳遞信息的物理場。聲波與電磁波的衰減之比如下:10kHz聲波在水中衰減僅約1dB/km,10kHz電磁波在水中衰減高達3000dB/km。
實孔徑側掃聲吶(SSS)多為拖曳方式工作,如圖3所示。
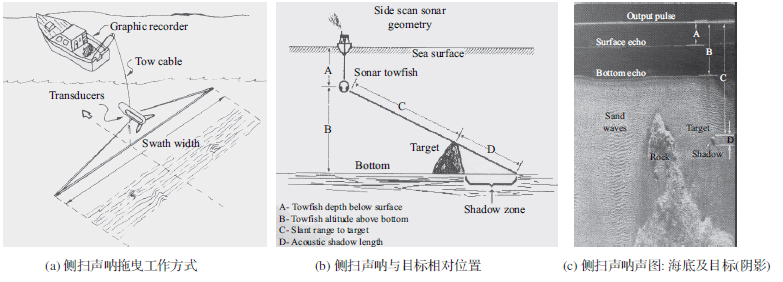
圖3側掃聲吶拖曳工作方式及聲圖
最早的側掃聲吶實驗是Hagemann(1958)為美國海軍完成的,直到1980年才解密發表。基于Hagemann的工作,西屋公司(Westinghouse)在20世紀60年代初建造了第一臺實用的側掃聲吶。很快,側掃聲吶就成為海底調查、海底成像方面的重要工具,揭示了海底上很多以往不為人知的細節。商用側掃聲吶系統最早用于海洋水下考古,特別是尋找沉船。
與實孔徑側視雷達相似,實孔徑側掃聲吶沿運動方向有恒定的波束開角,由聲吶換能器的實際孔徑確定,側掃聲吶水平波束及聲圖見圖4。
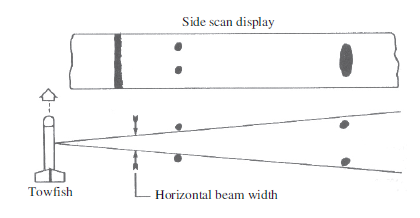
圖4側掃聲吶水平波束及聲圖
實孔徑側掃聲吶技術特性可歸納為水平波束恒定角分辨率,它與對波長歸一化的陣長成反比,θ==λ/L。其中,陣元或天線水平長度為L;工作頻率時,波長為λ。距離增加時,水平線分辨率降低,δ==R×θ==R×(λ/L)。
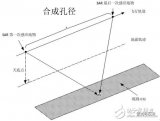
合成孔徑(側掃)聲吶(SAS)與合成孔徑側視雷達類似:利用小孔徑水聲換能器,在直線運動軌跡上均速移動,并在確定位置順序發射,接收并存儲回波信號。根據空間位置和相位關系對不同位置的回波信號進行相干疊加處理,合成虛擬大孔徑的基陣,從而獲得沿運動方向的高分辨率。與合成孔徑側視雷達相同,合成孔徑(側掃)聲吶沿運動方向的水平線分辨率為θsyn=L/2,其中,L為基陣長度。該水平線分辨率與頻率無關,可采用低頻工作;且與距離無關。
雷達應用電磁波,在空氣中的傳播速度約為300000km/s;聲吶應用聲波,在水中的傳播速度僅為c=1.5km/s。工作距離為R、達到運動速度v時,多接收子陣合成孔徑聲吶基陣的物理長度最小為L=4vR/c,每一接收子陣的水平寬度為方位向分辨率的兩倍。與實孔徑聲吶比較,種種這些因素使得合成孔徑聲吶的基陣體積大、質量大,系統復雜程度高。
在復雜多變的海洋環境中,拖體不可能嚴格地沿直線航跡勻速運動,運動誤差如圖5所示。
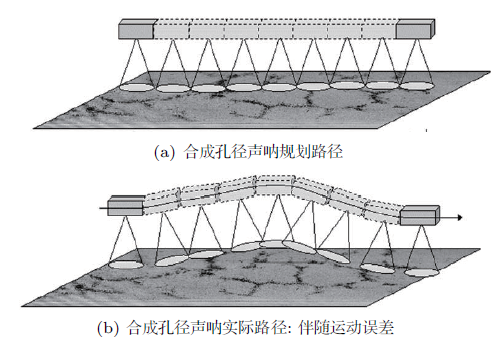
圖5 合成孔徑(側掃) 聲吶運動誤差
合成孔徑成像要求運動誤差<±(λ/8~λ/4),λ100kHz≈15mm,λ10kHz≈150mm。對運動誤差的要求更增加了合成孔徑(側掃)聲吶的系統復雜性。
早在20世紀70年代中期,合成孔徑技術就已經嘗試用于側掃聲吶。在1975年,Cutrona提出了合成孔徑聲吶的一種設計程序,建議采用多波束系統,以提高拖曳方向采樣率。大約在同時期,Williams進行了合成孔徑聲吶拖曳試驗。
受應用環境物理參數制約,合成孔徑聲吶的研發與應用滯后雷達多年。應用需求不迫切,也延緩了合成孔徑聲吶的研發。一份報告指出:早期水雷對抗的目的是檢測,識別大型號、幾何形狀簡單的水雷,如2m長的圓柱體目標。在當時的態勢下,水雷對抗艦艇上裝備的聲吶設備在大多情況已滿足需求。因而,相對復雜的SAS系統并未受到充分關注。
當水雷對抗的戰略戰術重點轉移至較淺的近沿海水域,對抗目標物為較小型號、更為隱蔽的水雷及機動武器時,新的需求要求聲吶分辨率大幅提高。水下無人航行器(UUV)或自治水下航行器(AUV)的研發及日益拓展的應用,為合成孔徑聲吶提供了比水面船只拖曳的拖體更為穩定、可靠的載體,也促進了合成孔徑聲吶系統的性能改進及廣泛應用。
⒈NURC淺水合成孔徑聲吶
北約海底研究中心(NURC)是北大西洋公約組織(NATO)下屬的三個研究與技術機構之一,負責NATO的海上研發,支持NATO的海上作業需求。
NURC在1998年啟動了水雷對抗合成孔徑聲吶的研發項目,于2002年按NURC的高水平合成孔徑聲吶系統技術指標進行了國際招標。2003年1月,Thales公司中標,按NURC設計指標研制SAS系統;Bluefin公司提供AUV,IXSEA公司提供慣導系統。2006年6月,在馬里納迪卡拉拉(MarinadiCarrara)區域完成了水上實驗。NURC完成的淺水SAS的載體是Bluefin-21,直徑0.53m,長3.5m,由Bluefin公司批量生產,供應市場;該SAS的工作頻率為270kHz~330kHz;由36個主接收陣元組成,總長1.2m;沿運動方向的水平分辨率為1.6cm;運動補償方案為羅經穩定DPC(G-DPC)導航系統。
⒉CSSRELIANT/SAS21系統
沿海系統站(CoastalSystemsStation,CSS)位于美國佛羅里達州巴拿馬市圣安德魯灣,是美國海軍的一個重要實驗室。其任務為水雷戰、兩棲戰、海上特種戰、潛水及生命支持的研究、開發、測試及評估,還包括沿海軍事行動及其他受到特別關注的先進對抗策略研究。
CSS在2003年的報告中指出:合成孔徑聲吶、水下自治潛器是水下研究與開發中最具有挑戰性的兩個項目,這兩個項目的有機結合將提供能力超強、應用廣泛的水下成像系統。當時,已有數個這樣的項目在實施,大多為軍事應用。CSS用自已開發的SAS系統與BluefinAUV集成,在2003年完成了初步實驗。
CSS的AUV/合成孔徑聲吶系統名為RELIANT/SAS21系統,據稱是第一個結合了AUV及SAS技術的水雷對抗實驗系統。其載體AUV的型號是Reliant,由Bluefin公司開發,長約3m,直徑約0.53m。
SAS21系統雙側、雙頻同時工作,低頻為15kHz~32kHz,高頻為165kHz~195kHz。高低頻發射波形與功率獨立編程控制。低頻分辨率為7:62cm×7:62cm;高頻分辨率為2:54cm×2:54cm。
⒊HISAS1030+HUGIN1000MRAUV
HISAS1030是KongsbergMaritime(KM)公司在原型機“Sensotech”的基礎上研發的多子陣干涉合成孔徑聲吶,適裝于AUV。其主要技術指標為分辨率優于5cm×5cm(理論值2cm×2cm);速度為2m/s時,工作距離為200m,速度為1.5m/s時,工作距離為275m;干涉測深分辨率為5cm×5cm~50cm×50cm;頻率范圍為60kHz~120kHz;帶寬為50kHz。2008年2月,在挪威奧斯陸海灣進行了海試,水深50m~100m,AUV高度約為25m。
五、合成孔徑聚焦技術在無損檢測及醫學成像上的發展
自20世紀60年代末及70年代初,同樣是為了改善沿換能器移動方向的分辨率,合成孔徑原理就已經試圖應用于超聲成像。在20世紀七八十年代,合成孔徑主要是用于無損檢測,采用收發共置換能器,如圖6所示。
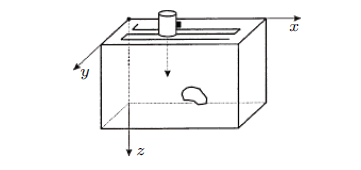
圖6 收發共置換能器無損檢測A-掃描數據采集
合成孔徑聚焦技術(SAFT)利用機電掃描系統,控制換能器沿預定路徑移動,在預定位置發射并接收試樣中缺陷反射的回波信號。換能器位置、發射信號及回波信號波形全部存儲在系統中。合成孔徑聚焦處理程序在設定的深度內對回波信號做線聚焦(2D-SAFT)或點聚焦(3D-SAFT)處理。2D-SAFT的信噪比可以提高8~10dB,3D-SAFT可以提高16~18dB。
20世紀八九十年代,SAFT主要用于焊縫無損檢測,還可用于薄壁及厚壁部件無損檢測。圖7是一個非常厚的部件,壁厚325mm。采用2MHz橫波斜探頭,探測到75mm深的裂隙。45?斜入射探頭沿鉆孔內壁掃描,裂隙在外壁。經破壞性探查核實,裂隙深度與SAFT-成像結果符合,誤差±2mm。
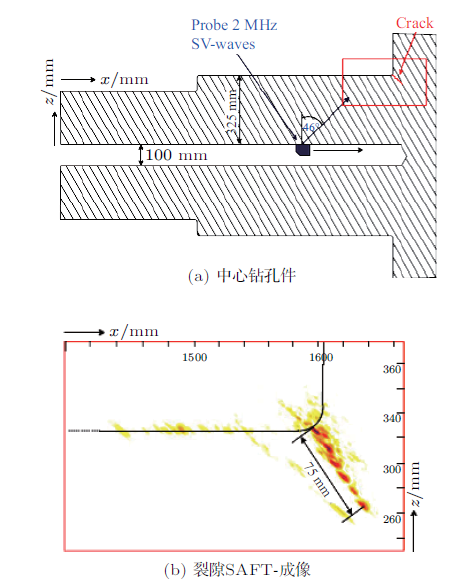
圖7 中心鉆孔件與裂隙SAFT-成像
換能器線陣應用到合成孔徑超聲成像后,有不同的實現方式。最簡單的系統是合成孔徑聚焦方式。其模式如圖8所示,換能器線陣有N個陣元,每次只激活一個陣元發射,接收回波信號并存儲在系統中。依次由陣元1至N重復N次后,由系統中調取數據相干疊加,得到高分辨聲圖。
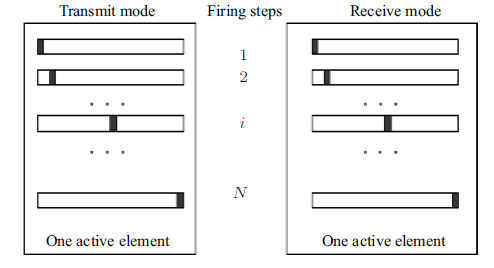
圖8 合成孔徑聚焦的發射及接收
為了提高信噪比,每次可以激活M>1個陣元,稱為多陣元合成孔徑聚焦(M-SAF),其模式如圖9所示。
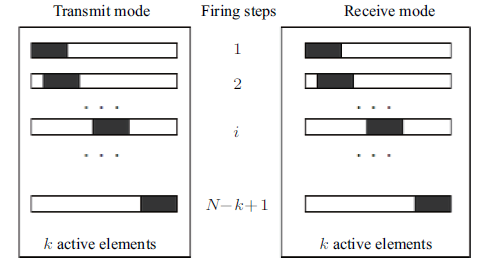
圖9 多陣元合成孔徑聚焦的發射及接收(M=K)
發射時只激活一個陣元,線陣中的全部陣元接收回波,稱為“發射合成孔徑”(STA),其模式如圖10所示。
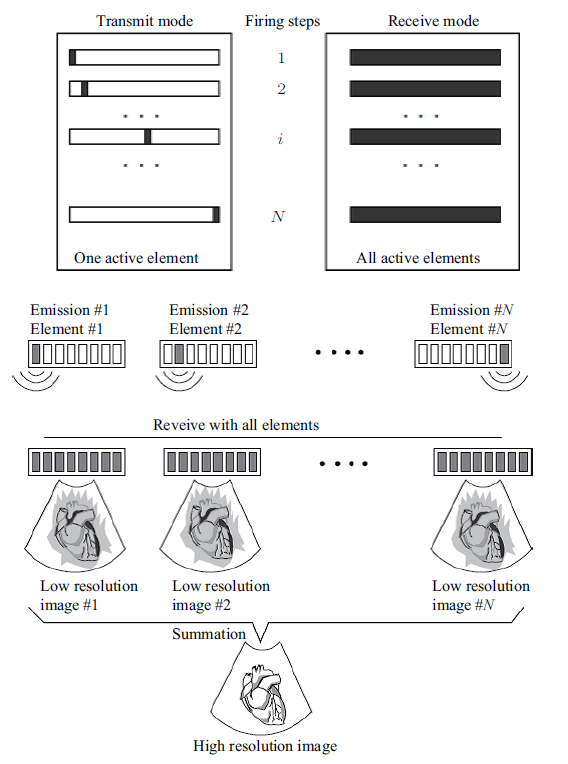
圖10 發射合成孔徑的發射及接收
為了提高聲圖刷新率,可以應用“稀疏發射合成孔徑(SparseSTA)”模式,其模式如圖11所示。稀疏發射合成孔徑模式在每次發射時,激活N/M>1個陣元,全部陣元接收回波信號。一幀數據采樣結束后,調取全部M×N個回波信號用于重建聲圖。
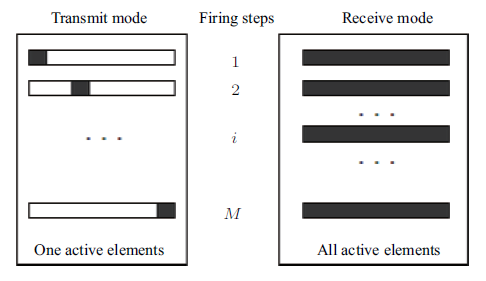
圖11 稀疏發射合成孔徑的發射及接收
接收合成孔徑(SRA)的模式如圖12所示。發射時,激活全部陣元;接收時,將線陣分為Ns=N/KR個子陣。每發射一次,一個接收子陣將KR個陣元接收到的回波信號疊加并存儲。然后,向同方向發射同樣的脈沖信號,其他子陣按序接收回波,疊加并存儲。最后,調出所有子陣的回波信號,相干處理形成高分辨聲圖。
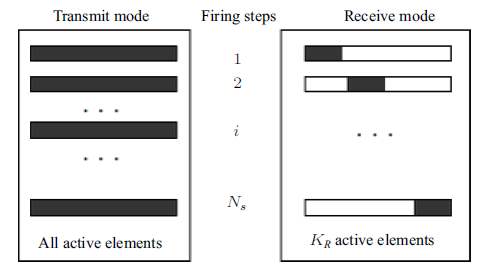
圖12 接收合成孔徑的發射及接收
六、結論
自20世紀50年代至今,合成孔徑在雷達地面、海面成像中的研發及應用已經進入了黃金時代,實際分辨率遠遠超出了初期的設想。但是,系統誤差,尤其是機載雷達運動誤差降低了實際能達到的分辨能力。受多變的海洋環境影響,運動誤差檢測與補償對提高合成孔徑聲吶的實際分辨率尤為重要,始終是受到關注的研發課題。自20世紀七八十年代以來,合成孔徑成像已應用到無損檢測及醫療診斷方面,有效地提高了超聲成像的分辨率及信噪比,其研發及應用推廣受到了多方關注。此外,在合成孔徑技術的各方面應用中,3D-成像及目標自動識別與分類都是研究熱點。
-
雷達
+關注
關注
51文章
3128瀏覽量
120356 -
合成孔徑成像
+關注
關注
1文章
2瀏覽量
6764
原文標題:合成孔徑成像的應用及發展
文章出處:【微信號:mwrfnet,微信公眾號:微波射頻網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
合成孔徑雷達的工作原理是什么?
怎么實現合成孔徑雷達衛星電磁兼容設計?
合成孔徑雷達轉發式干擾分析
合成孔徑雷達衛星
旋轉目標干涉逆合成孔徑三維成像技術
干涉合成孔徑雷達成像技術
合成孔徑雷達的研究熱點解析






 工商網監
工商網監
評論