 基于MSP430單片機和GPS技術實現物流跟蹤系統的設計方案
基于MSP430單片機和GPS技術實現物流跟蹤系統的設計方案
作者:陳著明;邱小華;覃建波
引言
現代物流是國民經濟的基礎之一,已被認為是企業在降低物質消耗、提高勞動生產率之外創造利潤的第三重要源泉,極大地降低了生產成本。但是目前物流運輸的營運水平普遍不高,給工商制造企業的發展帶來了很大不便,產品脫銷、訂單流失、貨物失竊等事件時常發生。針對目前物流的需要和現有的科學技術,本文提出了一種基于MSP430單片機的物流跟蹤系統設計的新方法。運用GPS模塊對貨物進行實時定位跟蹤,然后用強跟蹤卡爾曼濾波算法對GPS采集到的數據進行濾波;濾波后的數據信息再通過GSM模塊和AT命令,以短信息的形式發送到監控中心;監控中心的計算機對GPS數據信息和電子地圖進行匹配,從而達到對貨物進行實時定位監控的目的。同時,在貨物終端液晶可以實時顯示定位信息和從監控中心發來的短信息。
1 物流跟蹤系統的結構及硬件設計
1.1 物流跟蹤系統的結構
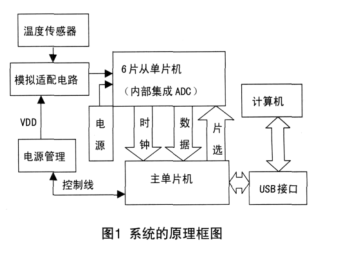
物流跟蹤系統首先要根據跟蹤覆蓋范圍、實時性、刷新速度和定位精度等要求,選擇合適的GPS接收機、GSM模塊和微處理器,并開發相關的應用軟件。圖1給出了簡單的物流跟蹤系統結構圖。
從圖1中可以看出,系統主要由3部分組成。
①貨物信息處理終端:包括中央處理器、GPS接收機、GSM模塊、顯示模塊、控制電路。主要實現對GPS定位數據的接收與分類處理,對監控中心命令的接收與解析,向監控中心發送定位信息,以及遇險報警和實時顯示定位數據等功能。
②GSM數字蜂窩移動通信網:包括GSM網絡、基站等。主要實現基站與移動目標的信息交換,以及GSM網絡與監控中心的信息交換。
③監控中心:包括數據庫、地理信息系統終端、業務處理終端。主要實現衛星定位信息在監控中心計算機的GIS電子地圖上的實時顯示。
1.2 物流跟蹤系統的硬件設計
物流跟蹤系統的硬件電路示意圖如圖2所示。本系統選用的中央處理器是美國德州儀器(TI)公司開發的 MsP430F147單片機。該系列單片機具有電源電壓低(1.8~3.6 V)、功耗低等優點,適用于手持設備或電池應用等場合。GPS接收機選用STDll_GPS_M0dule模塊,通過MAX232電平轉換芯片與單片機的 URXDl相連,以達到定位數據信息送到單片機處理的目的。GSM通信模塊采用西門子公司生產的TC35i,TC35i模塊的GSM_RX和GSM_TX 分別與單片機的URXDO和UTXDO連接,實現單片機與TC35i通信;TC35i的SIM卡接口電路與SIM卡座相連。液晶模塊TGl2864實現貨物終端的顯示功能。
2 卡爾曼濾波算法及其改進
2.1 卡爾曼濾波算法
卡爾曼濾波算法是以最小均方誤差為估計值的最佳準則,來尋求一套遞推估計的算法。其基本思想是:采用信號與噪聲的狀態空間模型,利用前一時刻的估計值和當前時刻的觀測值來更新對狀態變量的估計,求出當前時刻的估計值。動態GPS測量中,用卡爾曼濾波算法從受擾動的數據中估計狀態變量,能快速、準確地算出三維坐標。非差相位精密動態單點定位的卡爾曼濾波模型:

統計特征為:E(Uk)=O,E(Nk)=O,動態噪聲向量Uk、觀測噪聲向量Wk、動態噪聲向量和觀測向量都是期望值為0的白噪聲向量,cov(Uk,Uj)=Qkδkj,cos(Nk,Nj)=Rkδkj,cos(Uk,Nj)=O。
其中:Xk和Yk分別是k時刻的狀態矢量和觀測矢量;Fk/k-1為狀態轉移矩陣;Uk為k時刻動態噪聲;Tk/k-1為系統控制矩陣;Hk為k時刻觀測矩陣;Nk為k時刻觀測噪聲;Qk、Rk分別是系統動態噪聲和觀測噪聲的方差矩陣。δkj為克羅內克函數,即:
![]()
簡便起見,先考慮整周模糊度為常數時的矩陣向量,動態模型采用常速模型。
理想條件下,卡爾曼濾波是線性無偏最小方差估計。在實際應用中,由于濾波的狀態估計值可能存在偏移,且估計誤差的方差也可能很大,遠遠超出了按計算公式計算的方差所定出的范圍,這在濾波理論中稱為濾波的“發散現象”。當濾波發散時,就完全失去了濾波的最優作用,在實際中必須抑制發散現象。
2.2 強跟蹤卡爾曼濾波算法
為保證濾波器可靠收斂,考慮通過犧牲一定的精度換取濾波穩定性——例如增大系統的過程噪聲和觀測噪聲的方差陣——這樣就將許多未建模的誤差包含進去,使算法變得簡單可靠。參考文獻中提出的強跟蹤卡爾曼濾波算法就是依據這種思想,將狀態估計誤差的協方差陣乘以加權系數λk+1,如式(7)所示。這種方法具有很強的突變狀態跟蹤能力,并在濾波器達到穩態時保持這種能力,對初值和噪聲統計特性的敏感性也比較低。
式(9)和式(10)中的αi值是由先驗知識來確定的。可以看出,當狀態發生突變時,估計誤差Yk+1YTk+1的增大將引起誤差方差陣v0(k+1)增大;相應地,加權系數λi(k+1)增大,濾波器的跟蹤能力增強,可靠性提高。但是這種方法的缺點是破壞了濾波器的最優條件,使濾波結果產生一定幅度的波動。運用上節的粒子運動模型,通過仿真分析強跟蹤卡爾曼濾波算法。在仿真的過程中,突然將系統和觀測噪聲改變,對比兩種算法對噪聲改變的適應性。

由圖3和圖4可知,常規卡爾曼濾波算法對噪聲突變的應付能力比較弱,特別是噪聲模型和仿真時的固定模型相差較大時,濾波就出現了發散現象;強跟蹤卡爾曼濾波算法能適應濾波過程中的噪聲變化,但是降低了濾波精度。
3 物流跟蹤終端的軟件設計
3.1 系統主程序設計
系統主程序主要是實現系統的初始化,短信息的接收、刪除和發送等功能。初始化包括單片機各端口的配置、中斷設置、計數器初值設置、液晶初始化、GSM模塊初始化、串口的初始化設置等。串口發送程序包括發送短信息頭文件(GSM模塊格式選擇,設置短信息目標號碼),以及等待TC35i模塊的響應(當響應為 “》”時,繼續發送具體的內容數據。如果有結果返回,則短信息發送成功;反之,則重新開始)。對于短信息接收主要包括3個步驟:首先發送讀取短信息的命令;然后GSM模塊返回響應;最后對響應進行解析得到短信息的內容。接收到短信息后,顯示該短信息的內容,并刪除GSM模塊中的短信息。主程序流程如圖5所示。
3.2 采集中斷服務程序設計
系統GPS數據采集中斷服務程序子程序流程如圖6所示。實現的功能是采集GPS模塊數據信息,對所得的數據信息進行處理,再用強跟蹤卡爾曼濾波算法濾波,并發送到液晶顯示模塊和GSM模塊。
4 試驗結果
為了驗證強卡爾曼濾波算法在GPS定位中的作用,對使用強跟蹤卡爾曼濾波和未使用濾波算法的GPS定位進行定點測試對比。從圖7和圖8中明顯可以看出,使用強跟蹤卡爾曼濾波算法可以有效地抑制衛星定位漂移,提高衛星定位精度。
結語
為了滿足目前貴重物品運輸的需要,設計開發了以MSP430F147為控制核心、GPS模塊和GSM模塊為控制對象的物流跟蹤系統。本系統采用 MSP430單片機設計,體積小、功耗低,接口友好;采用了強跟蹤卡爾曼濾波算法對GPS數據信息濾波,大大提高了定位精度。同時,本裝置可用于不同的監控中心,監控中心只要能接收短消息,就可以確定物品的具體位置,方便實用。經過反復測試,在沒有障礙物的地方,GPS定位精度高和短信息接收發送實時性好。為了滿足市場不斷變化的需求,還需要進一步提高在錯綜復雜的地理環境下的定位精度,這是后續階段需要研究的方向。
責任編輯:gt
-
處理器
+關注
關注
68文章
19448瀏覽量
231359 -
單片機
+關注
關注
6044文章
44631瀏覽量
639163 -
計算機
+關注
關注
19文章
7551瀏覽量
88762
發布評論請先 登錄
相關推薦

MSP430單片機的同步串行SPI多通道溫度測試系統設計詳析
MSP430單片機實踐篇之MSP430單片機ADC模數轉換操作






 工商網監
工商網監
評論