 深度傳感器的三種技術對比
深度傳感器的三種技術對比

深度傳感器的三種技術
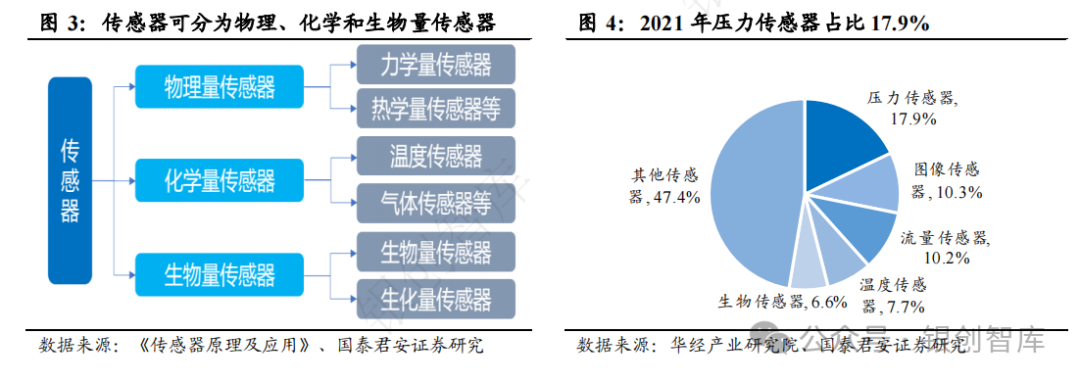
目前人們如果想探測環境深度信息,主要依賴于三種技術,分別是相機陣列, TOF(time of flight)技術,以及基于結構光的深度探測技術。
結構光:
接收器使用激光光源投射目標物,檢測反射目標物的變形,以基于幾何形狀計算深度圖。它必須掃描整個平面以獲得需要時間的深度圖,因此它是非常準確的。但是,此方法對環境亮度敏感,因此通常僅在黑暗或室內區域使用。
飛行時間(ToF):
ToF 主要有兩種方法。第一個很簡單:激光源發出一個脈沖,傳感器檢測到該脈沖在目標物體上的反射,以記錄其飛行時間。知道了光的恒定速度后,系統可以計算出目標物體的距離。為了確保高精度,脈沖周期必須短,這導致較高的成本。另外,需要高分辨率的時間數字轉換器,這會消耗很多功率。這種方法通常可以在高性能 ToF 傳感器中找到。
計算時間的另一種方法是發出調制光源并檢測反射光的相位變化。相變可以通過混合技術容易地測量。調制激光源比發出短脈沖更容易,并且混合技術比時間數字轉換器更易于實現。此外,LED 可用作調制光源來代替激光。因此,基于調制的 ToF 系統適合于低成本 ToF 傳感器。
相機陣列:
攝像頭陣列方法使用放置在不同位置的多個攝像頭來捕獲同一目標的多個圖像,并根據幾何結構計算深度圖。在計算機視覺中,這也稱為“立體視圖”或“立體”。最簡單但最受歡迎的相機陣列是雙相機,其中兩個相機相隔一定距離以模仿人眼。對于空間中的每個點,在兩個攝像機圖像中的位置均出現可測量的差異。然后,通過基本幾何來計算深度。
相機陣列的主要挑戰是如何在多個圖像中找到匹配點。匹配點搜索涉及復雜的 CV 算法。目前,深度學習可以幫助您找到準確度較高的匹配點,但是其計算成本很高。另外,有很多點很難找到匹配點。例如,在上面的瓦格納雕像的兩個視圖中,鼻子是最容易匹配的點,因為它的特征易于提取和比較。但是,對于面部的其他部分(尤其是面部無紋理的表面),很難找到匹配點。當兩個相機圖像的遮擋不同時,匹配會更加復雜。目前,相機陣列作為深度傳感器的魯棒性仍然是一個具有挑戰性的問題。
三種深度感測技術的對比
整體表現
對于深度感測,最重要的指標是深度精度。結構光具有最佳的深度精度性能,而相機陣列往往具有最大的深度誤差。
就深度感測范圍而言,結構光的范圍最短,而 ToF 的范圍取決于光源的發射功率。例如,智能設備可能只需要幾米的距離,而自動駕駛汽車則需要幾百米。同樣,攝像機陣列的測量范圍取決于兩個攝像機之間的空間。對于常規攝像機陣列,最佳性能測量范圍通常在 10m 左右,盡管也顯示了某些具有極窄空間的特殊攝像機陣列可以在 1m 左右測量深度。
對于深度圖分辨率,結構光的性能優于 ToF,因為可以精確控制結構發光圖案并精確捕獲其反射圖案。從理論上講,攝像機陣列具有良好的分辨率,但這是基于兩個圖像中的完美點匹配。使用非理想的點匹配(如光滑表面)時,分辨率會降低。
最后,我們需要考慮對環境亮度的限制。結構光需要黑暗的環境,而 ToF 傳感器由于快速發展的背景消除技術而可以承受更大范圍的環境亮度。對于攝像機陣列,明亮的環境效果最佳。在黑暗的房間中,相機陣列捕獲的圖像會變得嘈雜,并且對比度變差,因此點匹配變得極為困難,從而導致深度估計不準確。
成本
攝像機陣列的成本通常最低,其開發工作主要在軟件方面。雙攝像頭解決方案已經廣泛應用于許多智能設備和移動電話中。ToF 傳感器的成本適中,而結構光的成本最高。但是,隨著 ToF 的批量生產,預計其成本在不久的將來會大大降低。
可擴展性
通過展望這些技術的潛力,我們可以更好地利用它們來滿足未來的需求。
ToF 是半導體技術,并且具有最佳的可伸縮性。它的深度精度可以通過片上時間數字轉換器 / 混合電路進行縮放,其深度圖分辨率可以通過傳感器尺寸進行縮放,其測量范圍可以通過光源功率 / 調制方案進行縮放,并且其功耗可以通過用半導體技術擴展規模。
另一方面,結構光具有不錯的可伸縮性。光學系統是結構光的關鍵組成部分,光學系統可以隨著封裝技術而擴展(盡管不如半導體快)。
最后,縮放攝像機陣列主要依賴于軟件:我們將需要更好的算法來縮放其深度感應性能。它更像是一個數學問題,而不是工程問題,而改進硬件并沒有太大幫助。即使使用分辨率更高的相機,點匹配問題仍然存在。
建議僅使用結構光來執行生物識別任務,因為它具有最佳的深度精度。游戲應用需要中等深度分辨率和快速響應,因此 ToF 傳感器似乎是最合適的。對于其他應用程序(包括定位,識別,測量和增強現實),所有技術都可以做到,但是某些技術比其他技術更適合特定的應用場景。例如,相機陣列可能最適合在需要深度測量范圍的開放空間中的 AR 應用,而 ToF 傳感器最適合可以控制環境亮度的室內 AR.
審核編輯 黃昊宇
-
傳感器
+關注
關注
2565文章
53008瀏覽量
767464 -
TOF
+關注
關注
9文章
502瀏覽量
37321
發布評論請先 登錄
介紹三種常見的MySQL高可用方案
國產替代破局:人形機器人傳感器產業鏈深度拆解(附技術路線對比)
紅外傳感器技術分類:熱釋電、熱電堆與微測輻射熱計詳解

激光位移傳感器與傳統位移傳感器的對比

國內的電流傳感器相對比與國外的傳感器有哪些區別?
三種封裝形式下的400G光模塊概述
什么是PID調節器的三種模式
深度識別與多目標識別傳感器的區別
lidar傳感器和激光測距傳感器的區別
電容式壓力器分為哪三種
三星2億像素3層堆棧式傳感器即將問世






 工商網監
工商網監
評論