 一文解析汽車雷達的碎片記錄 毫米波RADAR與LIDAR探秘
一文解析汽車雷達的碎片記錄 毫米波RADAR與LIDAR探秘

碎片記錄的目的是彌補自己因間歇性健忘癥而帶來的碎片知識的丟失。特別是那些不屬于自己研究領域,卻又想弄明白的東西。另外呢,其實這篇文章也是給老婆交的作業,自從給她換了特斯拉以后,她一直好奇特斯拉 Autopilot 奧秘到底是什么,可能是我的知識能力的不足,在多次講解不通的情況下(呵呵,女人……),我也給自己留了這份作業。特別是她再一次在靠邊兒停車的時候把車開上馬路牙子之后,讓我覺得 Autopilot 最大的敵人不是 ADAS 算法對外面未知的圖形與突發狀況的訓練度不夠,而是女人……讓我感受到了完成這一份作業的必要性!
激光雷達和毫米波雷達。習慣且依賴駕駛汽車的人們,對這兩種事物肯定不會陌生。前者在真正的無人車應用領域所向披靡,最近 Apple 又把它帶入了消費電子類產品中,把 Lidar 概念引入到 iPad 中,讓筆者以為 iPad 裝上四個轱轆就可以自己開車了。而毫米波雷達目前被廣泛應用在 L2-L3 的輔助駕駛汽車中,特斯拉汽車用 8 個攝像頭、12 個超聲波傳感器和一個 77GHz 毫米波雷達實現了 autopilot 輔助駕駛功能,當然 mobileye 的 ADAS 系統和 nVidia 的 GPU 也是功不可沒的。
其實 Lidar 和毫米波雷達都屬于電磁波雷達的范疇,只是毫米波雷達技術屬于微波范疇,用毫米波作為發射源,而 Lidar 技術用紅外線光、可見光或紫外光等納米波作為光源。

其實在很久以前,有一種關于人類視覺成像的假說,這種假說認為人們覺得眼睛會發出的看不見的光線,然后擊中了外面的世界中的物體,使它們變得對人類可見。當然,你我都知道,事實的情況情況并非如此,反而是物體發出的光擊中了人眼,才讓人們感知。
但這并不意味著這不是一個完美的觀察方式。事實上,這種原理就是激光雷達背后的基本思想,一種數字式的成像形式,已經被證明在從考古學到自動駕駛汽車、消費電子產品所有領域都非常有用。前陣子,Lidar 幫助考古學家對瑪雅文化的古城進行了深度建模。
無論是毫米波雷達,還是 Lidar,都需要存在一組或多組發射接收裝置。以 Lidar 為例,傳統的機械 Lidar 需要光源、反射鏡、和接收器。由于早期的 Lidar 系統采用純機械式探測方式,是指其發射系統和接收系統存在宏觀意義上的轉動,也就是通過不斷旋轉發射頭,將速度更快、發射更準的激光從“線”變成“面”,并在豎直方向上排布多束激光(即 32 線或 64 線雷達),形成多個面,達到動態 3D 掃描并動態接收信息的目的。
這也就造成了它體積的龐大,不好與小型的消費電子產品集成。且價格十分昂貴。2018 年 Google 發布的無人駕駛汽車,一個機械式 Lidar 的就要 7 萬美元。這種體積龐大、價格昂貴的機械式 Lidar 難逃變為先烈的厄運。
歸功于半導體技術的發展,制造內部非移動結構或相對較小的移動結構的 Lidar 器件,成為了 Lidar 小型化的首要任務,目前 Lidar 小型化的技術設想主要有三種。
1.MEMS(Micro-Electro-Mechanical System)微機電系統
MEMS 指代的是將機械機構進行微型化、電子化的設計,將原本體積較大的機械結構通過微電子工藝集成在硅基芯片上,進行大規模生產。得益于 MEMS 技術的發展,這種技術成熟,易于量產,通過 MEMS 微鏡來實現垂直方面的一維掃描,MEMS 結構將機械微型化,掃描單元變成了 MEMS 微鏡。
2.OPA(optical phased array)光學相控陣技術
相比其他技術方案,OPA 方案給大家描述了一個激光雷達芯片級解決方案的美好前景,它主要是采用多個光源組成陣列,通過控制各光源發光時間差,合成具有特定方向的主光束。然后再加以控制,主光束便可以實現對不同方向的掃描。雷達精度可以做到毫米級,且順應了未來激光雷達固態化、小型化以及低成本化的趨勢,但難點在于如何把單位時間內測量的點云數據提高以及投入成本巨大等問題。目前一直沒有進入量產階段。
3.Flash
Flash 激光雷達的原理也是快閃,它不像 MEMS 或 OPA 的方案會去進行掃描,而是短時間直接發射出一大片覆蓋探測區域的激光,再以高度靈敏的接收器,來完成對環境周圍圖像的繪制。蘋果在 2020 年 iPad 中引入的 Lidar 技術就是 Flash Lidar 技術,它采用 dTOF 的探測技術,依靠 SPAD 單光子雪崩二極管提高整體器件的靈敏度。
而在小型化的 Lidar 技術中,光學相控陣(OPA)激光雷達受到芯片成熟度不足等各種問題的牽制,離落地還有一段較長的路要走。Flash 激光雷達暫時無法同時滿足遠近成像的要求,但隨著單光子面陣探測技術的成熟,有望成為未來的激光雷達技術路線方向。所以,MEMS Lidar 是目前最有可能先落地的車載 Lidar 方案。
第一是 MEMS 微振鏡幫助激光雷達擺脫了笨重的馬達、多棱鏡等機械運動裝置,毫米級尺寸的微振鏡大大減少了激光雷達的尺寸,無論從美觀度、車載集成度還是成本角度來講,其優勢都是十分明顯的。
第二,MEMS 微振鏡的引入可以減少激光器和探測器數量,極大地降低成本。采用二維 MEMS 微振鏡,僅需要一束激光光源,通過一面 MEMS 微振鏡來反射激光器的光束,兩者采用微秒級的頻率協同工作,通過探測器接收后達到對目標物體進行 3D 掃描的目的。與多組發射 / 接收芯片組的機械式激光雷達結構相比,MEMS 激光雷達對激光器和探測器的數量需求明顯減少。
第三,MEMS 微振鏡不是新技術,可以直接使用。其最成功的應用案例就是德州儀器(TI)的 DLP(DigitalLight Processing,數字光處理)顯示,其 DMD 芯片全球獨供,在投影機的 BOM 成本比例中占比也很高。此外,在 3D 攝像頭、條形碼掃描、激光打印機、醫療成像、光通訊等領域,MEMS 微振鏡也不乏成功應用案例。
但 MEMS Lidar 在車載上的落地工作也不是一帆風順,車載環境有它的特殊難題,信賴性就是最大的因素。MEMS 微振鏡屬于振動敏感性器件,車載環境下的振動和沖擊容易對它的使用壽命和工作穩定性產生不良影響,使得激光雷達的測量性能惡化。
工作溫度范圍也是 MEMS 微振鏡通過車規的一大門檻。通常情況下,車規級產品需要核心元器件滿足 -40℃到 125℃的工作范圍。在實際應用過程中,MEMS 微振鏡的材料屬性會隨著環境溫度的改變而發生變化,從而導致微振鏡運動特性的變化。因此材料的選擇和制造工藝對實現車規級 MEMS 微振鏡來說,是巨大的挑戰。還有就是芯片尺寸縮小,會直接影響 MEMS Lidar 的旋轉角度,而要得到較大的角度,就需要把芯片的尺寸做大,這與 Lidar 小型化、低成本化的初衷是矛盾的。
最后,激光由于波長較短,面對極端天氣如雨、霧、霾時,測量準確性會大大下降。這時毫米波雷達的存在就顯得十分有必要了。
在智能駕駛傳感器領域,和 LiDAR 相比,毫米波雷達更接地氣,在技術上已非常成熟,而且其市場出貨量相當可觀,毫米波實質上就是電磁波。毫米波的頻段比較特殊,其頻率高于無線電,低于可見光和紅外線,頻率大致范圍是 10GHz—200GHz。毫米波介于微波和 THz(1000GHz)之間,可以說是微波的一個子集。
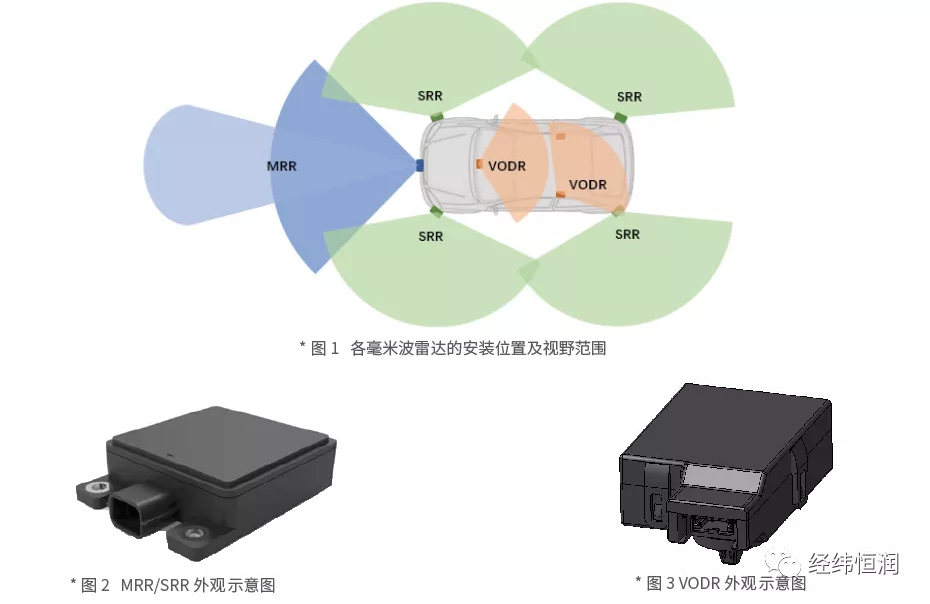
在這個頻段,毫米波相關的特性使其非常適合應用于車載領域。目前,比較常見的車載領域的毫米波雷達頻段有三類。
其一是 24—24.25GHz 這個頻段,目前大量應用于汽車的盲點監測、變道輔助。雷達安裝在車輛的后保險杠內,用于監測車輛后方兩側的車道是否有車、可否進行變道。這個頻段也有其缺點,首先是頻率比較低,另外就是帶寬比較窄,只有 250MHz。
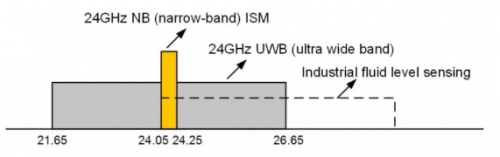
第二類頻段就是 77GHz,這個頻段的頻率比較高,國際上允許的帶寬高達 800MHz。這個頻段的雷達性能要好于 24GHz 的雷達,所以主要用來裝配在車輛的前保險杠上,探測與前車的距離以及前車的速度,實現的主要是緊急制動、自動跟車等主動安全領域的功能。
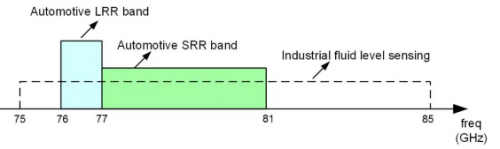
第三類應用頻段就是 77GHz—81GHz,這個頻段最大的特點就是其帶寬非常寬,要比 77GHz 的高出 3 倍以上,大約為 4GHz。這也使其具備非常高的分辨率,可以達到 5cm。這個分辨率在自動駕駛領域非常有價值,因為自動駕駛汽車要區分行人等諸多精細物體,對帶寬的要求很高。
而在波長方面,24GHz 毫米波的波長是 1.25cm,而 77GHz 毫米波的波長大概是 4mm,毫米波的波長要比光波的波長長 1000 倍以上,所以它對物體的穿透能力更強。
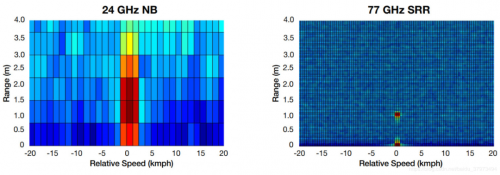
77GHz 雷達比 24GHz 的第一個優勢在距離分辨率和精度。
與 24GHz 頻段下的只有 250MHz 帶寬的 ISM 頻段相比,77GHz 頻段下的 SRR 頻帶可提供高達 4GHz 的掃描帶寬,顯著提高了距離分辨率和精度。
由于距離分辨率和精度與掃描帶寬成反比,因此與 24GHz 雷達相比,77GHz 雷達傳感器在距離分辨率和精度方面的性能更好,經過測試發現可提高 20 倍。高距離分辨率可以更好地分離物體(例如站在汽車附近的人)并提供檢測到物體的密集點,從而完善環境建模和物體分類,這對于研發先進的駕駛輔助算法和自動駕駛功能非常重要。
此外,分辨率越高,傳感器識別的最小距離就越小,因此在停車輔助等需要高精確度的應用方面,77-81GHz 雷達有著顯著的優勢。
第二個優勢在速度分辨率和精度。速度分辨率和精度與射頻頻率成反比。 因此,頻率越高,分辨率和精度就越好。與 24 GHz 傳感器相比,77 GHz 傳感器可將速度分辨率和精度提高 3 倍。對于汽車停車輔助應用,速度分辨率和精度是至關重要的,因為在停車時需要以低速準確地操縱車輛。
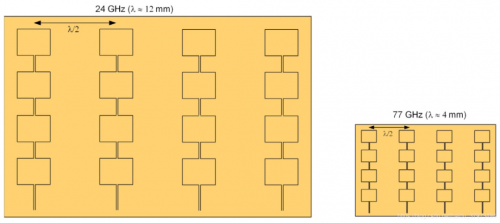
第三個優勢是芯片設計尺寸的縮小。較高射頻頻率的主要優勢之一就是傳感器尺寸可以更小。對于相同的天線視場和增益,77GHz 天線陣列的尺寸可以在 X 和 Y 維度上減小約 3 倍。這種尺寸上的縮減在汽車上非常有用,主要體現在汽車周圍的應用(包括需要安裝近距離傳感器的門和后備箱)和車內的應用。
但是毫米波雷達也存在一些不足,第一就是很難獲得觀測物體 z 坐標的數據,只能獲得 x 軸和 y 軸的坐標,因此只能測距,無法輸出圖像信號。因此,xy 與速度 v 信息只能得到一個 3D 的物體信息。第二,對橫向目標敏感度低,例如:對橫穿車輛檢測效果不佳;第三,行人反射波較弱,對行人分辨率不高,探測距離近;第四,對高處物體和小物體的識別不佳。
如今毫米波雷達和 Lidar 都進入了 4D 識物的維度,毫米波雷達在努力完善自己對 z 軸坐標的獲取,而 Lidar 則也憑借多普勒效應探測,可以獲得物體速度信息。下圖是 Lidar 獲得的雷達點云圖。
上文中也提到了,由于距離分辨率和精度與掃描帶寬成反比,那么說明擁有更高掃描帶寬的 Lidar 比毫米波雷達擁有更可靠的精度和探測距離。
我們堅信,未來的汽車自動駕駛技術不可能是單一技術獨占的,一定是基于可見光視覺(CIS Camera)、毫米波雷達、超聲波雷達、Lidar 幾種傳感器相互配合的。
編輯:hfy
-
mems
+關注
關注
129文章
4154瀏覽量
194196 -
激光雷達
+關注
關注
971文章
4236瀏覽量
192852 -
自動駕駛
+關注
關注
789文章
14320瀏覽量
170628 -
毫米波雷達
+關注
關注
107文章
1103瀏覽量
65373 -
LIDAR
+關注
關注
10文章
349瀏覽量
30368
發布評論請先 登錄






 工商網監
工商網監
評論