") 永磁同步電機(jī)控制系列的數(shù)學(xué)模型(7):怎么解耦
永磁同步電機(jī)控制系列的數(shù)學(xué)模型(7):怎么解耦
1 永磁同步電機(jī)在dq坐標(biāo)系上的數(shù)學(xué)模型(為什么要解耦)
將三相靜止坐標(biāo)系下的PMSM的數(shù)學(xué)模型經(jīng)過(guò)CLARK 和 PARK 變換之后,得到以下dq坐標(biāo)系上的數(shù)學(xué)模型。

如果將這個(gè)數(shù)學(xué)模型轉(zhuǎn)換為一張圖來(lái)表示,就會(huì)很清楚的看到其中的耦合關(guān)系。
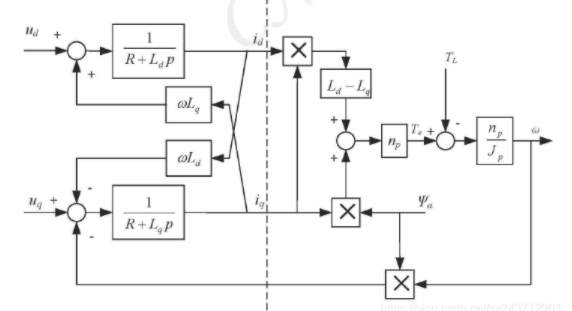
由永磁同步電機(jī)的電壓方程和數(shù)學(xué)模型可以看出,d軸電壓 Ud 不僅受 d軸電流 id 的影響,還受q軸電流 iq的影響,這說(shuō)明永磁同步電機(jī) d軸電壓 和 q軸電壓 存在一種耦合關(guān)系。我們可以將公式中的 和 視作耦合項(xiàng),由于耦合項(xiàng)的影響,我們的Ud 和 Uq 是無(wú)法實(shí)現(xiàn)獨(dú)立控制的。我們必須想辦法解決這個(gè)問(wèn)題。
另外是實(shí)際控制中,這種耦合會(huì)對(duì)控制器的性能產(chǎn)生比較大的危害,從公式里面可以看出 轉(zhuǎn)速 的值越大這個(gè)耦合項(xiàng)就越大,這說(shuō)明電機(jī)的速度越高,這個(gè)耦合項(xiàng)對(duì)電機(jī)的控制器性能的影響就越大,這是非常嚴(yán)重的,我們必須要消除它。
2 解耦的策略 (怎么解耦)
此文章中我只介紹一種簡(jiǎn)單的解耦策略,
從公式上可以看出,永磁同步電機(jī)耦合的影響是可以通過(guò)id=0的控制策略和前饋補(bǔ)償?shù)姆绞降窒舻模偠灾灰?/p>
ud 表達(dá)式后面 iq 的影響 和 uq 表達(dá)式后面 id 的影響,就可以達(dá)到解耦的目的。
2.1 id=0的控制策略對(duì)解耦的貢獻(xiàn)
首先我們討論 id=0 對(duì)解耦的作用,矢量控制 id =0 控制的本質(zhì)是實(shí)現(xiàn) dq軸的電流靜態(tài)解耦,
d軸的阻尼繞組是會(huì)產(chǎn)生磁通的,與永磁體的磁通共同構(gòu)成電機(jī)的磁場(chǎng)。id變化的同時(shí),總的磁通變化,這是一層耦合關(guān)系。
id=0 時(shí),磁通完全由永磁體來(lái)提供。直軸的電流為0,這就使得電機(jī)沒(méi)有直軸的電樞反應(yīng),即直軸是不貢獻(xiàn)轉(zhuǎn)矩的。電機(jī)的所有的電流全部用來(lái)產(chǎn)生電磁轉(zhuǎn)矩,這與一臺(tái)他勵(lì)直流電動(dòng)機(jī)就等效,只用控制 iq 的值就可以控制電機(jī)的轉(zhuǎn)矩了,這就很自然的實(shí)現(xiàn)了電機(jī)的靜態(tài)解耦。
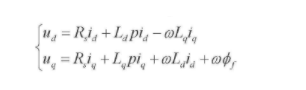
當(dāng) id =0 后,電機(jī)的電壓方程
2.2 電流前饋解耦對(duì)解耦的貢獻(xiàn)
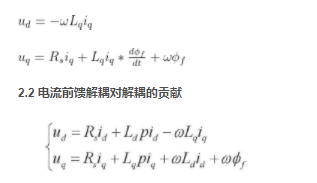
永磁同步電機(jī)耦合的影響可以通過(guò)前饋補(bǔ)償?shù)姆绞降窒簦赿軸控制器和q軸控制器的輸出端,分別引入與永磁同步電機(jī)dq軸電壓方程中耦合項(xiàng)相等的信號(hào)作為耦合補(bǔ)償,即可實(shí)現(xiàn)電流控制器的解耦控制。因此也成為電壓前饋解耦。解耦的控制框圖如圖所示。
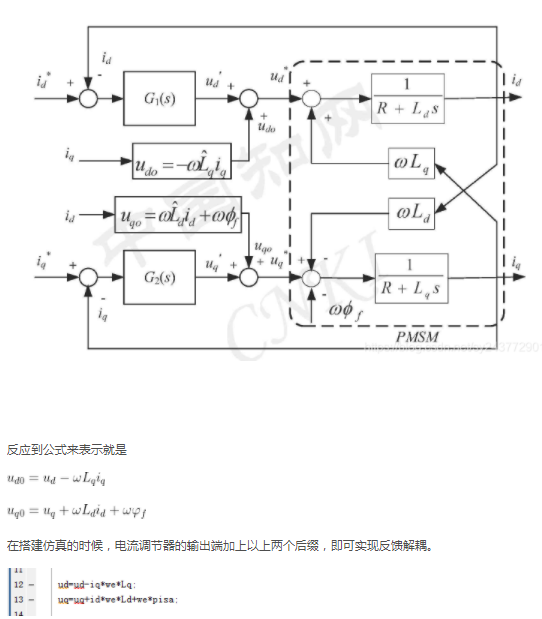
我自己是通過(guò)編程來(lái)實(shí)現(xiàn)的。
3 實(shí)驗(yàn)結(jié)果對(duì)比
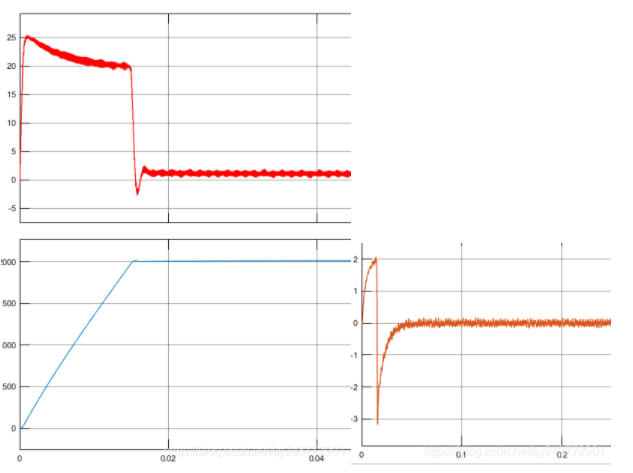
3.1 id=0 控制仿真實(shí)驗(yàn)結(jié)果(下左為轉(zhuǎn)速波形和 iq 的波形,右為 id 的波形)
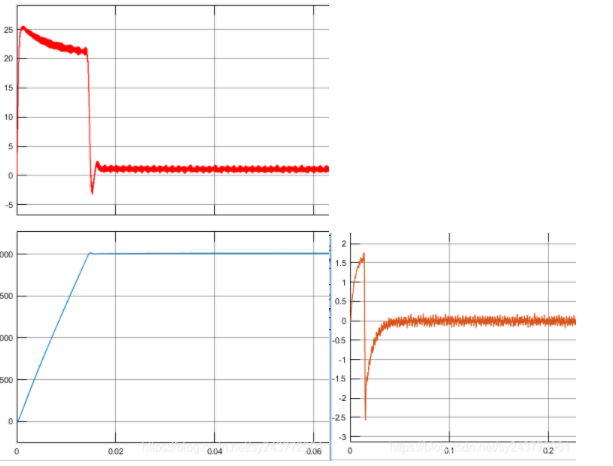
3.2 電流反饋解耦控制仿真結(jié)果(下左為轉(zhuǎn)速波形和 iq 的波形,右為 id 的波形)
3 波形具體分析
3.1 iq波形解耦前后對(duì)比(左為解耦前 iq波形,后解耦后 iq波形)
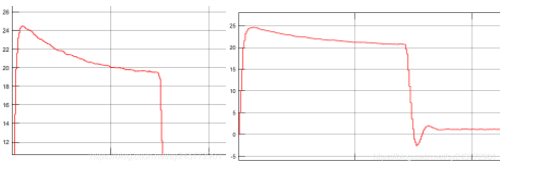
對(duì)比前后 iq 的波形,明顯解耦后的 iq 比解耦前的相應(yīng)速度要快,且平穩(wěn)度要更好,這將意味著電磁轉(zhuǎn)矩也更加穩(wěn)定,所以電機(jī)的階躍響應(yīng)的速度提升。此次仿真的電機(jī)是一臺(tái)隱極的電機(jī),如果是凸極的電機(jī)效果將更明顯。
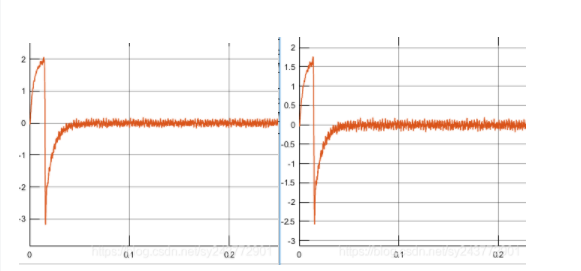
3.1 id波形解耦前后對(duì)比(左為解耦前 id波形,后解耦后 id波形)
對(duì)比前后 id 的波形可以看出,在電機(jī)啟動(dòng)階段,id 的幅值明顯得到了反饋的校正,幅值明顯比解耦前要小,解耦后最大值才0.5安,尤其在高速時(shí),這種效果將更加明顯。(此處這個(gè)尖峰還未弄清楚原因,如有了解的可以在下面留言,感謝感謝)
小結(jié)
永磁同步電機(jī)在運(yùn)行過(guò)程中,交直軸電壓之間存在耦合的現(xiàn)象,即d軸的參數(shù)變化會(huì)引起q軸的參數(shù)變化,這將不利于我們的控制。而電流前饋解耦就是從電機(jī)模型出發(fā),使電壓在經(jīng)過(guò)PI控制器整定之后的輸出,得到一個(gè)跟耦合量相同的前饋補(bǔ)償,補(bǔ)償可以將耦合項(xiàng)抵消,從而實(shí)現(xiàn)了解耦。
從實(shí)驗(yàn)的效果來(lái)看,解耦后的電機(jī)階躍響應(yīng)的速度更快,且電流的波形更加穩(wěn)定,這將有益于整個(gè)系統(tǒng)的性能。
編輯:hfy
-
電機(jī)控制
+關(guān)注
關(guān)注
3540文章
1897瀏覽量
269261 -
永磁同步電機(jī)
+關(guān)注
關(guān)注
28文章
874瀏覽量
49679 -
解耦
+關(guān)注
關(guān)注
0文章
40瀏覽量
11942
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論