") 永磁同步電機控制系列的數(shù)學模型(9):三閉環(huán)系統(tǒng)的控制原理
永磁同步電機控制系列的數(shù)學模型(9):三閉環(huán)系統(tǒng)的控制原理
1 什么是三閉環(huán)控制系統(tǒng)?
在雙閉環(huán)(速度環(huán)和電流環(huán))控制的基礎上,在轉速外環(huán)外再加一個位置外環(huán),這個位置外環(huán)的主要作用是使得電機準確的跟隨位置給定,所以又稱為位置閉環(huán)系統(tǒng)。他的原理和雙閉環(huán)系統(tǒng)相似,通過電機的目標位置和實際位置做差,得到的偏差量作為轉速調(diào)節(jié)器的速度給定。位置偏差越大,相應的轉速給定也越大。
跟雙閉環(huán)控制系統(tǒng)最大的區(qū)別就是,三閉環(huán)主要解決的是使得電機轉到哪的問題,而雙閉環(huán)主要解決的是轉多快的問題。
2 三閉環(huán)系統(tǒng)的控制原理和搭建
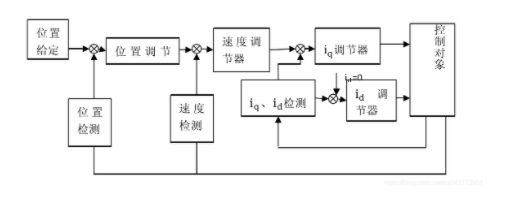
具體的結合原理框圖進行介紹,如上圖所示。在基礎的雙閉環(huán)控制的基礎上,增加一個位置環(huán),我們可以將雙閉環(huán)看成一個速度控制模塊,而位置調(diào)節(jié)器將給定位置信號和實際位置檢測信號的差值整定為這個控制模塊的速度給定,從而控制電機按照想要的速度和方向旋轉,從而控制電機的位置。
舉個例子會比較好理解:給定位置在350°,而實際位置在50°,想要電機旋轉到目標位置角,就需要電機順時針旋轉300°。那么此時位置調(diào)節(jié)器就會輸出控制電機正轉的指令,速度環(huán)接受指令,進行順時針旋轉,到達目標位置后停止旋轉。
3 位置環(huán)參數(shù)設計思路
第一步:雙閉環(huán)參數(shù)設計。使得電機轉速跟隨性能優(yōu)越,階躍響應效果較好,且系統(tǒng)的快速性較好。如前文所述,三閉環(huán)的基礎即為雙環(huán)控制,一個好的位置控制系統(tǒng),其雙環(huán)控制的效果一定需要調(diào)節(jié)到最優(yōu)值。
第二步:位置環(huán)參數(shù)設計。引入位置反饋量和位置調(diào)節(jié)器,使得仿真系統(tǒng)框圖如第二節(jié)中框圖原理一致,給定輸入信號,并調(diào)節(jié)位置環(huán)參數(shù)。
1、信號給定:建議初始給定輸入信號為斜坡信號,且斜率較小;
2、調(diào)節(jié)器設置:建議調(diào)節(jié)器設為純P調(diào)節(jié)器,因為大部分位置控制是不允許超調(diào)存在的,且位置P調(diào)節(jié)器的初始參數(shù)可以設置稍微大一點,可以從500開始試驗。
3、限幅值設置:建議將位置調(diào)節(jié)器的輸出限幅值設為電機的額定轉速(雙閉環(huán)PI參數(shù)滿足電機額定轉速快速穩(wěn)定跟隨)。
4 實驗結果
其實本質上就是在雙閉環(huán)的基礎上加了一個位置環(huán),其實難度和結構都比較簡單,但是要實現(xiàn)高的精度,還有很快的相應速度,如果純PI需要特別理想的參數(shù),或者就是增加前饋補償,本次我只是嘗試了調(diào)PI的方法。
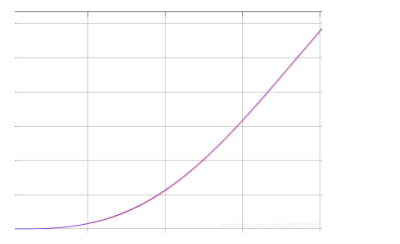
下圖是轉子位置給定和實際位置圖(此時我的給定是一個凹形曲線),紅色的是實際位置,藍色的是給定。
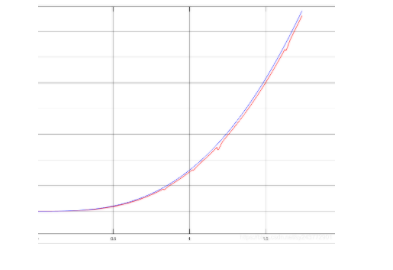
再看帶載運行的情況,有小范圍的波動,以上四次波動分別為 2N 4N 10N 15N,可以看出都能夠快速回到給定位置。
小結:
1、三環(huán)位置控制的目標是電機轉到哪里,而雙環(huán)控制的目標是轉多快,兩者存在較大差異。
2、位置調(diào)節(jié)器將給定位置信號和實際位置檢測信號的差值整定為這個控制模塊的速度給定,從而控制電機按照想要的速度和方向旋轉,從而控制電機的位置。
3、雙環(huán)是位置控制重要的基礎,進行位置控制之前,首要條件就是將雙環(huán)系統(tǒng)性能調(diào)至最佳。
4、設計思路要明確
編輯:hfy
-
永磁同步電機
+關注
關注
28文章
876瀏覽量
50426 -
調(diào)節(jié)器
+關注
關注
5文章
876瀏覽量
47471
發(fā)布評論請先 登錄
永磁同步電機控制系列的數(shù)學模型(7):怎么解耦

永磁同步電機動態(tài)數(shù)學模型和常用公式總結
永磁同步電機矢量控制(兩電平)淺談數(shù)學模型
永磁同步電機電機本體數(shù)學模型在MATLAB下的仿真
推導永磁同步電機d-q軸坐標系數(shù)學模型
搭建考慮鐵耗時永磁同步電機(PMSM)的數(shù)學模型
建立永磁同步電機的數(shù)學模型
永磁同步電機控制系列的數(shù)學模型(1)
永磁同步電機的矢量控制策略(二)之數(shù)學模型

永磁同步電機的數(shù)學模型





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論