 機器視覺工業鏡頭參數的介紹
機器視覺工業鏡頭參數的介紹
機器視覺系統中,鏡頭作為機器的眼睛,其主要作用是將目標物體的圖像聚焦在圖像傳感器(相機)的光敏器件上。數據系統所處理的所有圖像信息均需要通過鏡頭得到,鏡頭的質量直接影響到視覺系統的整體性能。
這一期鏡頭學堂將對機器視覺工業鏡頭相關參數做簡要介紹:
01
焦距(EFL)
定義
透鏡中心到像方焦點的距離。
光學系統中的焦距用來衡量光學系統匯聚或發散光線的能力。
焦距示意圖
該如何理解焦距與視場角的關系呢?
對于相同的感光元件,搭配的鏡頭焦距越長,視場角越小,反之成立(排除枕形畸變的影響)。
可以根據下面這組圖片來直觀的感受一下
注:使用同款感光芯片
02
光圈數(F.No)
定義
焦距(EFL)與入瞳(D,光圈在物方空間的像)的比值,即F.No=EFL/D。
F.No數的大小是如何對畫面亮度、景深及裝配靈敏度產生影響的呢?
a.畫面亮度
F.No數的大小決定進入光學系統能量的多少。
F.No越大,進入光學系統的光線越少,畫面越暗;F.No越小,進入光學系統的光線越多,畫面越亮。
如下圖所示:
注:此項默認相機曝光時間、增益等參數恒定。
b.景深
在其它所有參數保持一致的前提下,F.No越大,景深越大;F.No越小,景深越小。
c.裝配靈敏度
F.No越大,圖像對安裝傾斜的靈敏度低,越易于裝配;F.No越小,圖像對安裝傾斜的靈敏度高,越不易于裝配。
03
畸變(Distortion)
定義
光學系統中,由于光學透鏡固有的透視失真導致實際成像相對于被攝物體的失真程度。
光學畸變
OP
Distortion
光學畸變指的是物體經過光學系統所成的像對于物體本身而言的失真程度。
光學畸變計算方法:
OP.Dist(%)=(實際像高-理想像高)/理想像高× 100%
TV 畸變
TV
Distortion
TV畸變指的是實際拍攝圖像時,像的變形程度。
TV畸變計算方法:
TV.Dist(%)=(H1 - H2)/H
TV畸變可分為枕形畸變和桶形畸變,對角線向外延長的變形(畸變值為正)稱作枕形畸變,反之,對角線向內縮短的變形(畸變值為負負)稱作桶形畸變。
04
視場角(Field of View)
定義
鏡頭在感光元器件上所能看到的空間角度范圍,即光學系統入瞳中心對物的張角或出瞳中心對像的張角。
視場角與焦距(EFL)的關系:
若Y為Sensor的半對角線長度,在不考慮光學系統畸變的前提下,對角線視場角(2θ)=2*arctan(Y/EFL),如下圖所示:
注:視場角與鏡頭焦距、Sensor靶面大小和鏡頭畸變有關:
a.鏡頭焦距相同的情況下,Sensor靶面越大,視場角越大;
b.Sensor靶面相同的情況下,鏡頭焦距越小,視場角越大;
c. 鏡頭焦距和Sensor靶面都相同的情況下,枕形(負)畸變越大,視場角越大。
05
清晰度(Resolution)
定義
分辨率和反差綜合表現的結果。
分辨率又稱分辨力、解析力、鑒別率、解析度,指的是鏡頭清晰的再現被攝景物細節的能力,分辨率越高的鏡頭,拍攝的圖像越清晰細膩。
清晰度也可以用像面上鏡頭在單位MM內能夠分辨的線對數表示,單位是LP/MM,能夠分辨的線對數越多,代表鏡頭分辨率越高。如下圖所示:
反差即對比度,用來形容圖像最亮處和最暗處的差別;用MTF(ModulationTransfer Function調制傳遞函數)來表示,MTF描述的是光學成像系統對各頻率分量對比度的傳遞特性,如下式所示:
其中I’max和I’min表示像的最大和最小灰度值,Imax和Imin表示物的最大和最小灰度值。
很明顯,調制度介于0和1之間,調制度M越高,意味著反差越大;當圖像中的最大亮度和最小亮度相等,反差完全消失,此時調制度為0。
下圖為分辨率為10LP/MM,MTF在0.05~0.4之間的對比圖片,從下圖可以看出,人眼可接受的最小可分辨的MTF數值在0.15~0.2之間。
MTF如何影響到鏡頭的整體成像效果?
低頻率時的MTF值決定了圖像的對比度,高頻率時的MTF值決定了圖像的分辨力,MTF的優劣直接影響到鏡頭的整體成像效果,如下圖:
A曲線: 曲線平滑下降,說明圖像的解像力和對比度均達到了較好的水平,見A圖;
B曲線: 低頻率時的MTF值持續很高,說明圖像的對比度很好;但是高頻率時的MTF很低,說明圖像的解像力較差,見B圖;
C曲線: 低頻率時的MTF值下降較快,說明圖像對比度較差;高頻時的MTF較B曲線高,說明圖像解像力效果比B好,見C圖;
06
相對照度(Relative Illumination)
定義
圖像邊緣亮度與中心亮度的比值。Sensor表面不同位置的照度的大小與該處入射于像面的光線入射角的Cosin四次方成正比。
相對照度<1??
相對照度<1的原因:中心視場與邊緣視場的有效通光孔徑不同(如左圖),造成中心與邊緣的亮度差異。
07
景深(Depth of Field)
定義
能夠在像平面上呈現清晰的像的物方空間深度范圍。
那么景深是如何計算的?又和哪些因素有關呢?
可成清晰像的最遠的物平面稱為遠景平面,它與對準平面的距離成為后景深△L1;能成清晰像的最近物平面稱為近景平面,它與對準平面的距離稱為前景深△L2;景深=前景深+后景深,如下圖所示:
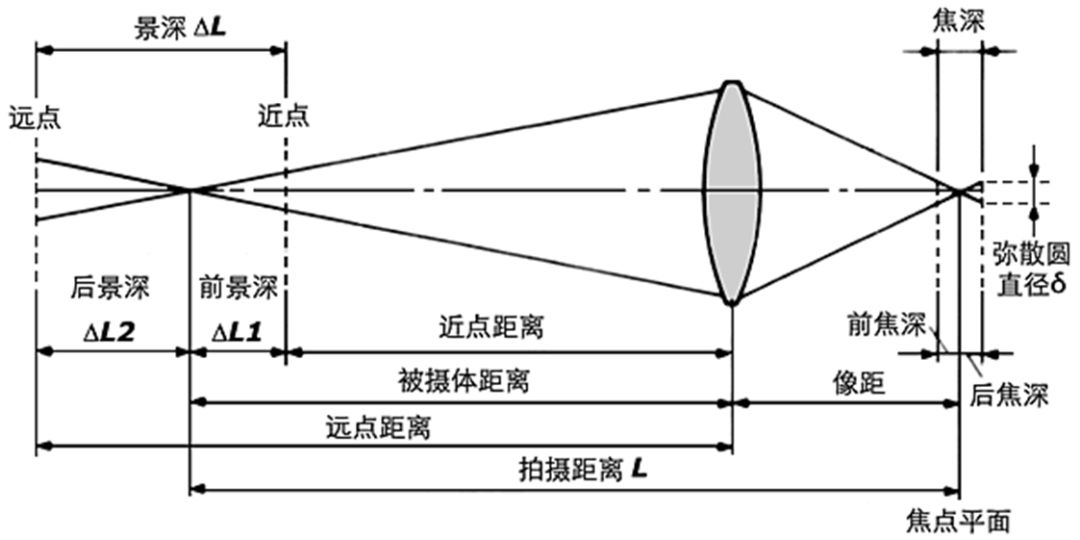
前景深 ΔL1= FδL2/ (f2 + FδL)
后景深 ΔL2= FδL2/ (f2 - FδL)
景深 ΔL =ΔL1+ΔL2=2f2FδL2/( f 4- F2δ2L2)
δ——容許彌散圓直徑
f——鏡頭焦距
F——鏡頭的拍攝光圈值
L——對焦距離
ΔL1—— 前景深
ΔL2——后景深
ΔL——景深
由景深計算公式可以看出,景深與鏡頭使用的F.No 、 f焦距、拍攝距離以及對圖像質量的要求(表現為容許彌散圓的大小)有關。
這些主要因素對景深的影響如下(假定其他的條件都不改變):
a.鏡頭光圈:
光圈越大,景深越小;光圈越小,景深越大;
b. 鏡頭焦距:
鏡頭焦距越長,景深越小;焦距越短,景深越大;
c. 拍攝距離:
距離越遠,景深越大;距離越近,景深越小。
08
放大倍率(Magnification)
定義
像高和物高的大小之比。
放大倍率的計算方法:

09
靶面大小(Max Image Circle)
定義
感光元器件對角線尺寸。
靶面大小示意圖
傳感器類型
對角線長度(mm)
傳感器寬度(mm)
傳感器高度(mm)
1/3"
6.000
4.800
3.600
1/2.5"
7.182
5.760
4.290
1/2"
8.000
6.400
4.800
1/1.8"
8.933
7.176
5.319
2/3"
11.000
8.800
6.600
1"
16.000
12.800
9.600
4/3"
22.500
18.800
13.500
全畫幅-35mm
43.300
36.000
24.000
10
鏡頭接口(Mount)
C接口是工業鏡頭最為常用的一種接口,其法蘭距(法蘭面距離感光芯片的距離)為17.526mm,螺紋規格:直徑1英寸,螺距1-32UNF;
CS接口是監控行業較為常用的一種接口,其法蘭距(法蘭面距離感光芯片的距離)為12.526mm,螺紋規格:直徑1英寸,螺距1-32UNF;
從下圖來直觀地了解C接口與CS接口區別:
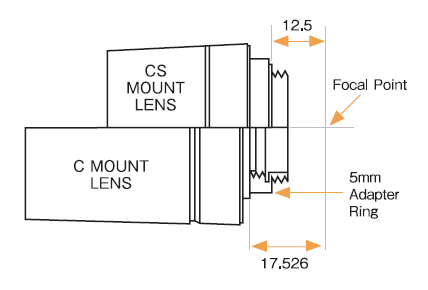
a.C接口的相機不能搭配CS接口的鏡頭使用,會導致圖像不清晰;
b.CS接口的相機可以搭配C接口的鏡頭使用,但是要使用5mm轉接圈才能正常聚焦;
F接口是一種卡口型接口,法蘭距46.5mm,最早由Nikon為其35mm式相機而開發。目前較多的應用在大靶面相機和線掃描相機上,使用此接口,鏡頭可輕松安裝和拆卸;
M接口是一種螺紋接口,通常用于替換較大靶面相機的F接口,由接口直徑(42mm、58mm、72mm等)、螺距(0.75mm、1mm等)和法蘭距定義,種類較多;
S接口是M接口的一種,規格:螺紋直徑12mm,螺距0.5mm。
原文標題:工業鏡頭參數知多少
文章出處:【微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
芯片
+關注
關注
459文章
52319瀏覽量
438181 -
相機
+關注
關注
4文章
1450瀏覽量
54553 -
機器視覺
+關注
關注
163文章
4520瀏覽量
122529
發布評論請先 登錄


工業相機:機器視覺的“核心之眼”,四大分類詳解

【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
51camera 2024產品型錄-工業相機、工業鏡頭、光源

機器視覺與運動控制:科技協同下的完美搭檔
工業相機鏡頭參數詳解助力精準選型







 工商網監
工商網監
評論