 機器人技術中常用的一些路徑規劃算法
機器人技術中常用的一些路徑規劃算法
導讀
本文分享了在GitHub開源的一個存儲庫,包含了機器人技術中常用的一些路徑規劃算法,大部分代碼由Python實現,每種算法都配有相關動畫的運行過程。
在機器人研究領域,給定某一特定任務之后,如何規劃機器人的運動方式至關重要。
最近,GitHub 上開源了一個存儲庫,該庫實現了機器人技術中常用的一些路徑規劃算法,大部分代碼是用 Python 實現的。值得一提的是,開發者用 plotting 為每種算法演示了動畫運行過程,直觀清晰。
項目地址:
https://github.com/zhm-real/PathPlanning
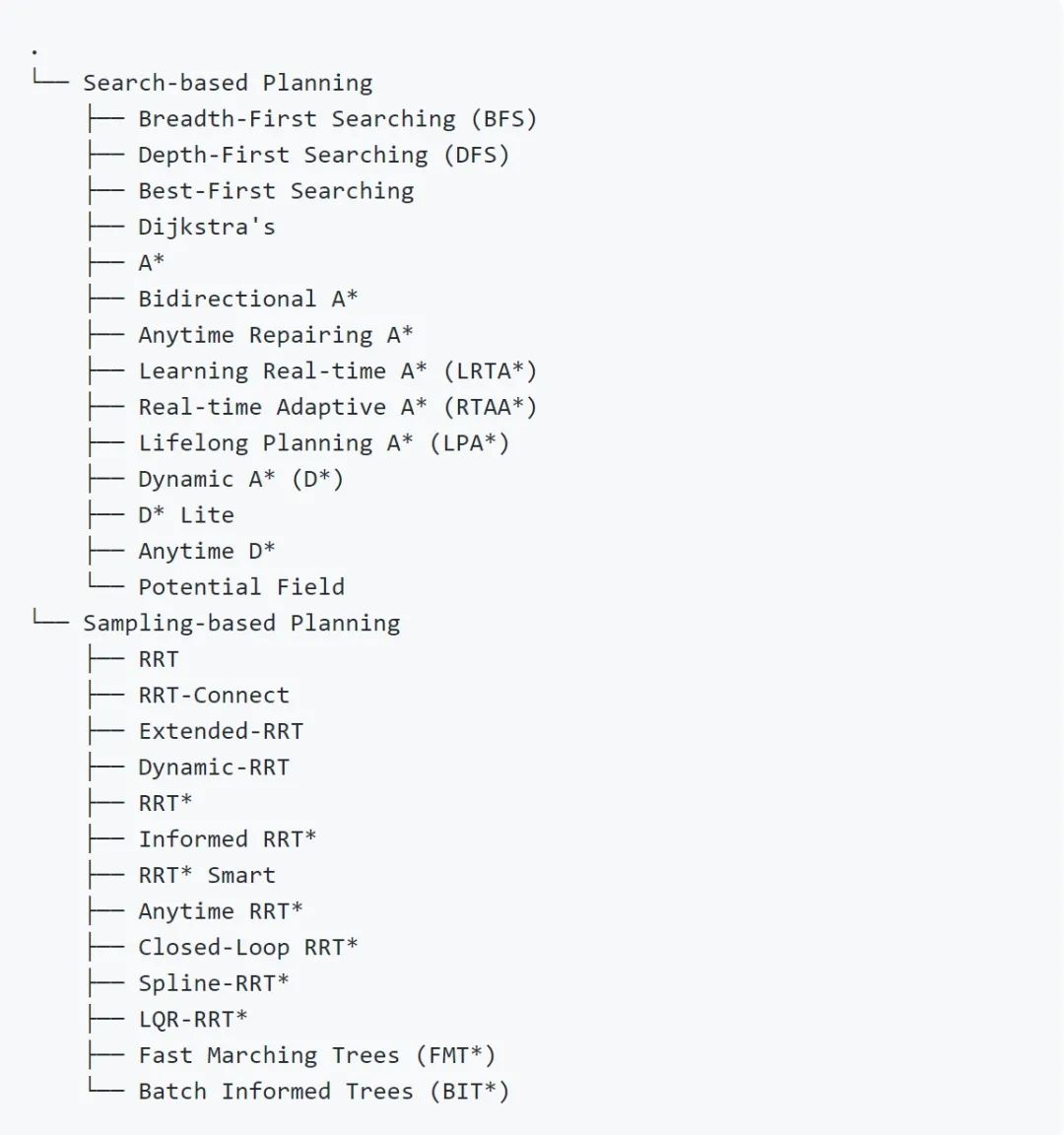
該開源庫中實現的路徑規劃算法包括基于搜索和基于采樣的規劃算法,具體目錄如下圖所示:
基于搜索的路徑規劃算法
基于搜索的路徑規劃算法已經較為成熟且得到了廣泛應用,常常被用于游戲中人物和移動機器人的路徑規劃。
最佳路徑優先搜索算法
Dijkstra 算法
A * 搜索算法
雙向 A * 搜索算法
重復 A * 搜索算法
Anytime Repairing A* (ARA*) 搜索算法
實時學習 A * 搜索(LRTA*)算法
實時適應性 A * 搜索(RTAA*)算法
動態 A * 搜索(D*)算法

終身規劃 A * 搜索算法
Anytime D * 搜索算法:變動較小
Anytime D * 搜索算法:變動較大
基于采樣的路徑規劃算法
與基于搜索不同,基于采樣的路徑規劃算法不需要顯式構建整個配置空間和邊界,并且在高維度的規劃問題中得到廣泛應用。
快速隨機搜索樹(RRT)算法
目標偏好 RRT 算法
雙向快速擴展隨機樹(RRT_CONNECT)算法
Extended_RRT 算法
動態 RRT 算法
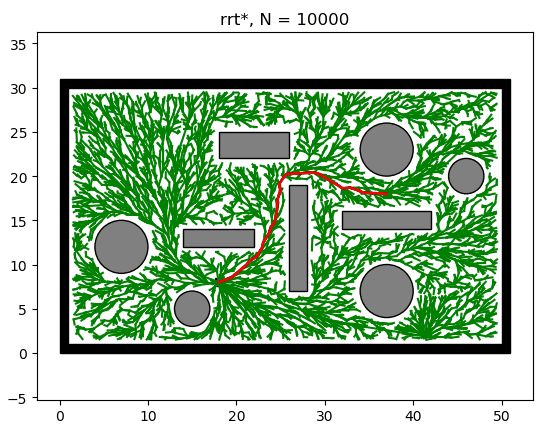
N = 10000 時,rrt * 算法
N = 1000 時,rrt*-Smart 算法
快速行進樹(FMT*)算法
N =1000 時,Informed rrt * 算法
Batch Informed 樹(BIT*)算法
責任編輯:lq
-
機器人
+關注
關注
213文章
29567瀏覽量
211944 -
算法
+關注
關注
23文章
4702瀏覽量
94957 -
GitHub
+關注
關注
3文章
482瀏覽量
17521
原文標題:機器人是如何規劃路徑的?動畫演示一下吧
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
AGV小車中的動態路徑規劃算法揭秘

詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
具身智能工業機器人路徑規劃算法成為破局關鍵
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】1.全書概覽與第一章學習
《具身智能機器人系統》第7-9章閱讀心得之具身智能機器人與大模型
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
先進機器人焊接技術:解析新一代焊接控制模塊的關鍵功能與應用實踐
多臺倉儲AGV協作全局路徑規劃算法的研究






 工商網監
工商網監
評論