 關于任意多相機系統的SLAM重設計
關于任意多相機系統的SLAM重設計
在SLAM系統中增加更多的相機可以提高魯棒性和準確性,但會使視覺前端的設計變得非常復雜。因此,文獻中的大多數系統是為特定的相機配置定制的。在這項工作中,我們的目標是一個適用于任意多相機設置的自適應SLAM系統。為此,我們重溫了可視化SLAM中的幾個常見構建塊。特別是,我們提出了一個自適應初始化方案,一個傳感器無關的信息論的關鍵幀選擇算法,和一個可擴展的基于體素的地圖。這些技術對實際的相機設置做了很少的假設,并且更喜歡基于理論的方法而不是啟發式方法。通過這些修改,我們采用了最先進的視覺里程計,實驗結果表明,修改后的流水線可以適應各種各樣的攝像機設置(例如,一個實驗中有2到6個攝像機),而不需要傳感器特定的修改或調整。
貢獻
自適應初始化方案。
與傳感器無關的信息論關鍵幀選擇算法。
可擴展的基于體素的地圖管理方法。
多相機系統在感知算法方面實現了卓越的性能,并被廣泛應用于現實世界的應用中,如全向測繪、自主無人機和虛擬現實耳機。為了便于在SLAM中使用這種系統,我們提出了幾個通用設計來自動適應任意多相機系統。
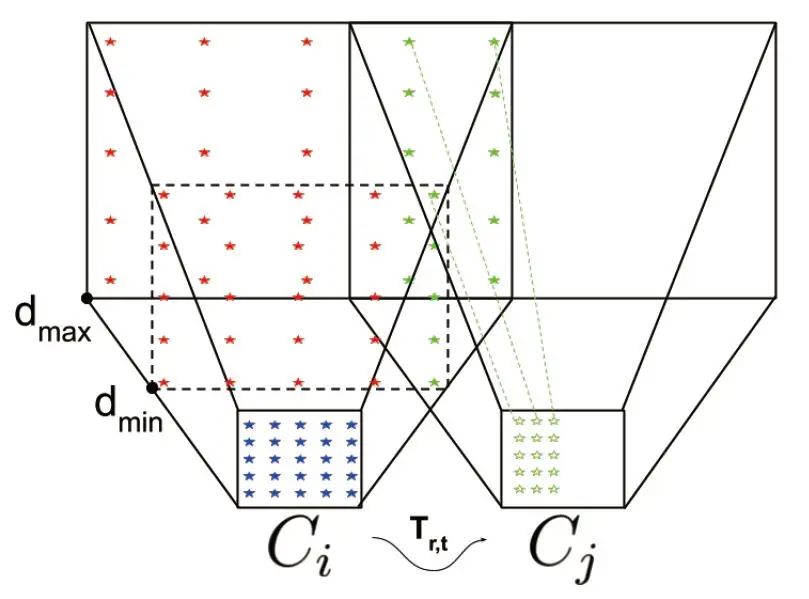
圖2 兩個攝像機之間立體重疊檢查的圖示,Ci和Cj。藍星是相機I像面上的采樣點,綠星是成功投影到相機j的3D點,紅星是從像面上掉下來的點。
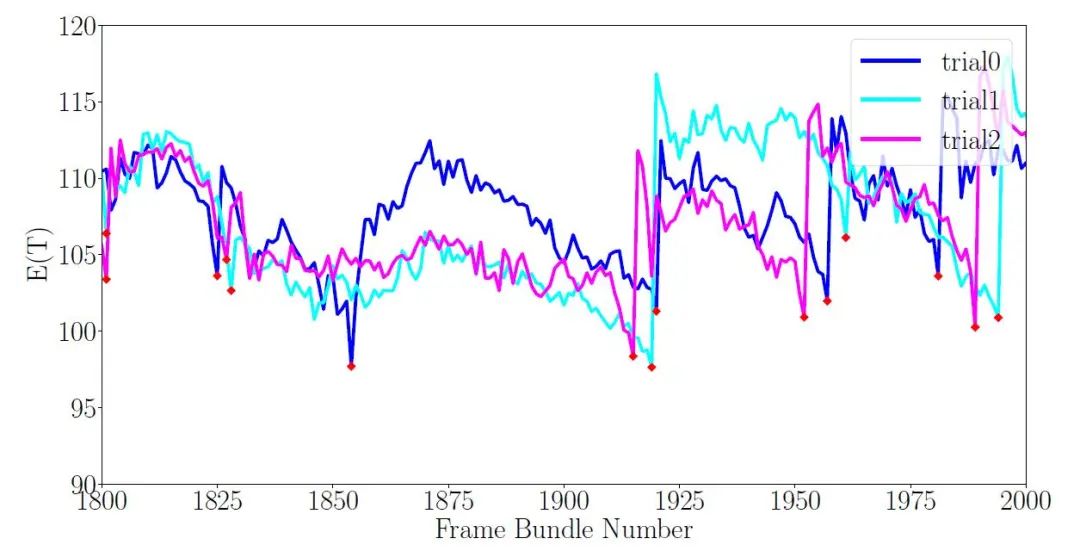
圖3 EuRoC MH 01中3次運行的負熵演化。每次運行的E(T)以不同的顏色顯示,紅點表示某幀被選為關鍵幀的位置。插入關鍵幀后,E(T)增加,隨著傳感器遠離地圖,e(T)減少。
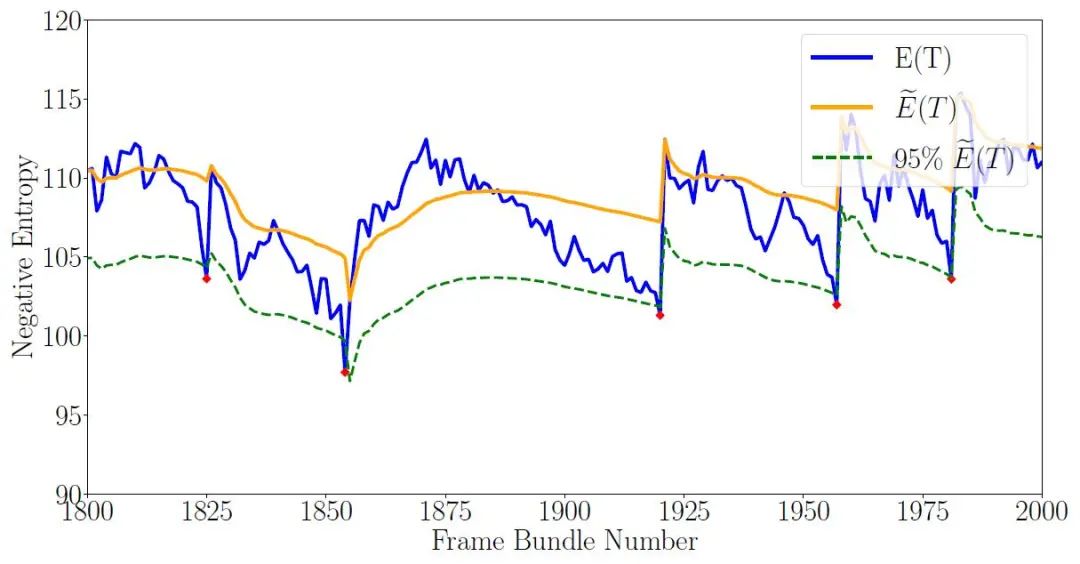
圖4 運行平均E(T)和關鍵幀選擇。運行平均過濾器(黃色)跟蹤自最后一個關鍵幀以來的定位質量。當當前幀的負熵(藍色)低于運行平均值的某個百分比(綠色虛線)時,將選擇一個新的關鍵幀(紅點),并重置運行平均值過濾器。
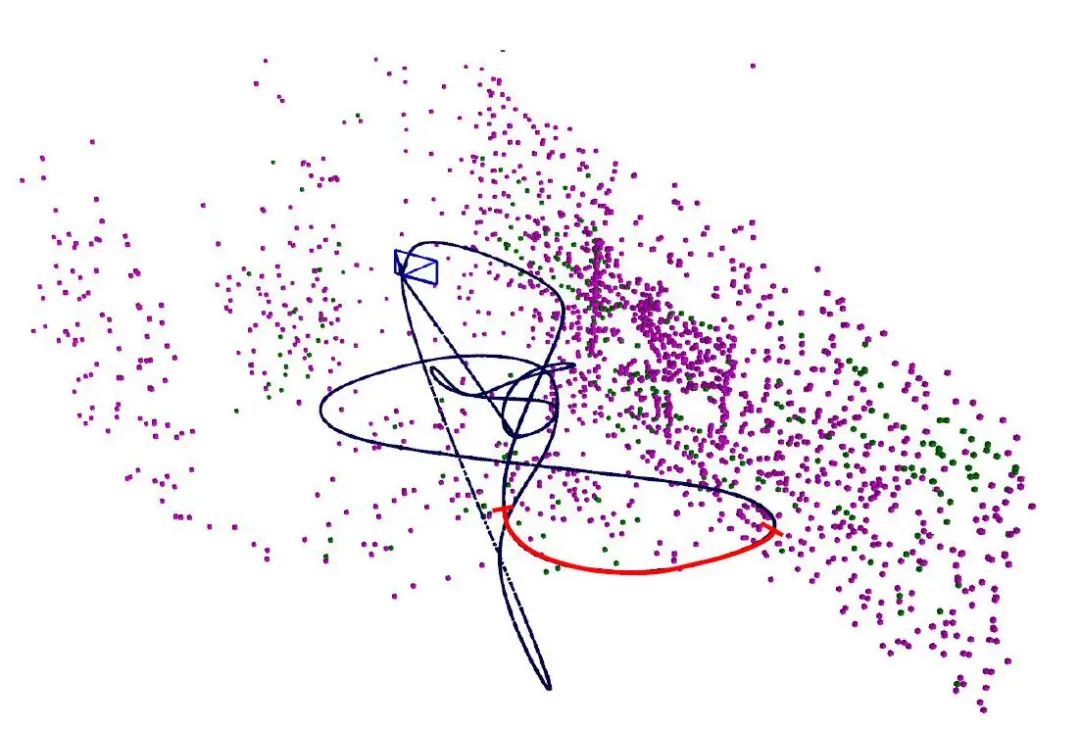
圖5 模擬環境中的模擬圖8軌跡。該軌跡是通過用5個攝像機運行調整后的VIO管道來估計的。單目設置丟失軌跡的部分用紅色標記。品紅色點是SLAM系統跟蹤的地標。
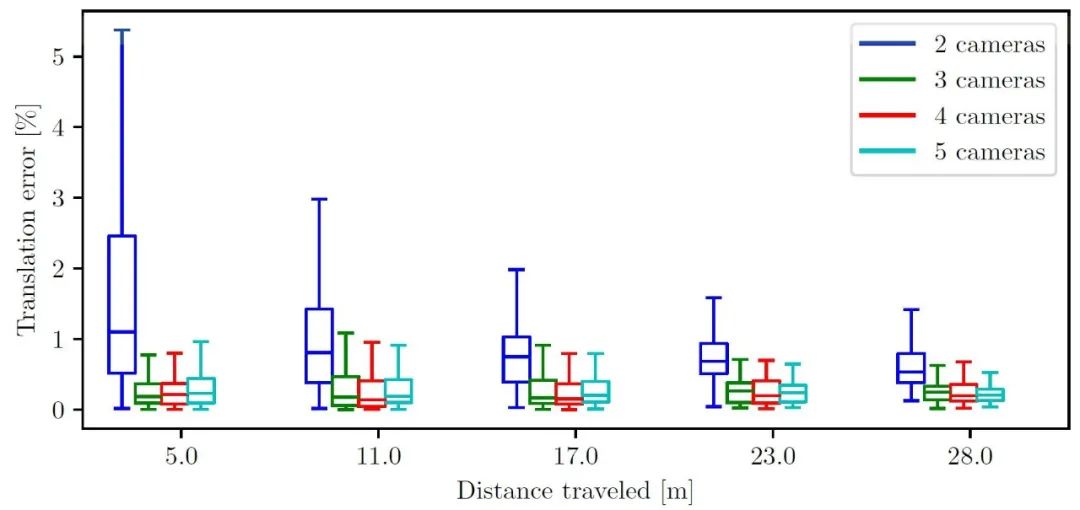
圖6 5次運行模擬中的總體相對平移誤差。
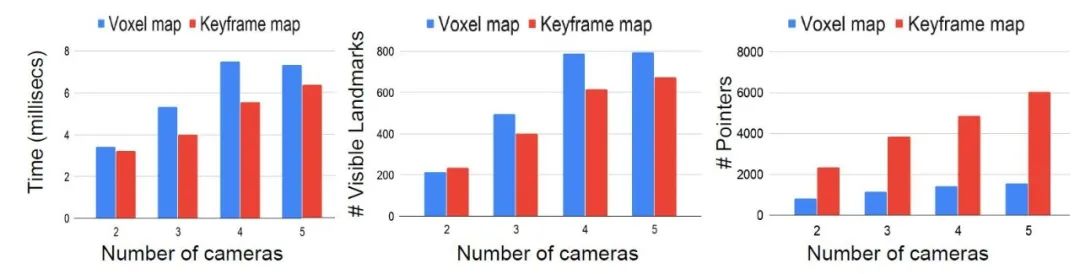
圖7 針對不同的相機配置(2到5個攝像機),將建議的體素圖與標準關鍵幀進行比較。左:VIO前端總時間。中間:從地圖中檢索匹配的地標。右側:指向地標位置的引用/指針的數量。

圖8 含BA的EuRoC數據集的相對平移誤差百分比。
表1 EuRoC數據集的RMSE中值(米)超過5次。以粗體突出顯示的最低誤差。

表2 EuRoC序列中5次運行的關鍵幀平均數。

圖3 單目和立體設置的不同關鍵幀選擇標準的關鍵幀平均數。
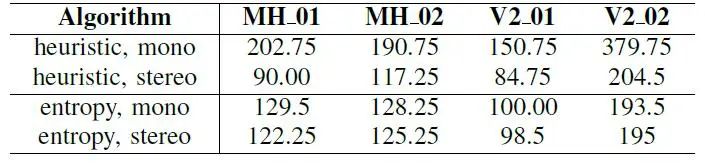
表4科學園日序列中多相機管道的不同軌跡誤差度量。第一行包含完整軌跡的絕對RMSE(547.488米)

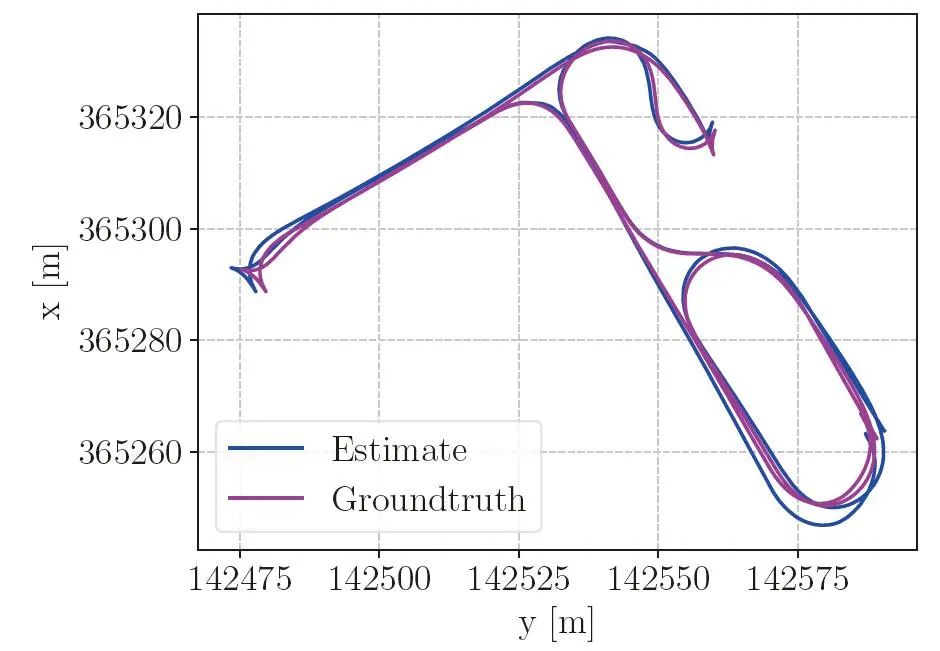
圖9 科學園日序列中FRB配置的估計軌跡和基本軌跡的俯視圖。
原文標題:任意多相機系統的SLAM重設計
文章出處:【微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
相機
+關注
關注
4文章
1436瀏覽量
54495 -
SLAM
+關注
關注
24文章
435瀏覽量
32327
原文標題:任意多相機系統的SLAM重設計
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
Spinnaker 4 SDK助力擴展多相機成像系統

三維高斯潑濺大規模視覺SLAM系統解析

礦山起重設備遠程監控管理系統方案
一種基于點、線和消失點特征的單目SLAM系統設計

將40+臺GigE工業相機連接到單一系統竟能零錯誤運行數天!

康謀方案 | BEV感知技術:多相機數據采集與高精度時間同步方案
一種基于MASt3R的實時稠密SLAM系統

利用VLM和MLLMs實現SLAM語義增強


MG-SLAM:融合結構化線特征優化高斯SLAM算法

友思特分享 車載同步技術創新:多相機系統如何實現精準數據采集與實時處理?
從算法角度看 SLAM(第 2 部分)


【直播預告】AI系統的多相電源原理與應用






 工商網監
工商網監
評論