") GPS定位誤差是怎么產(chǎn)生的
GPS定位誤差是怎么產(chǎn)生的
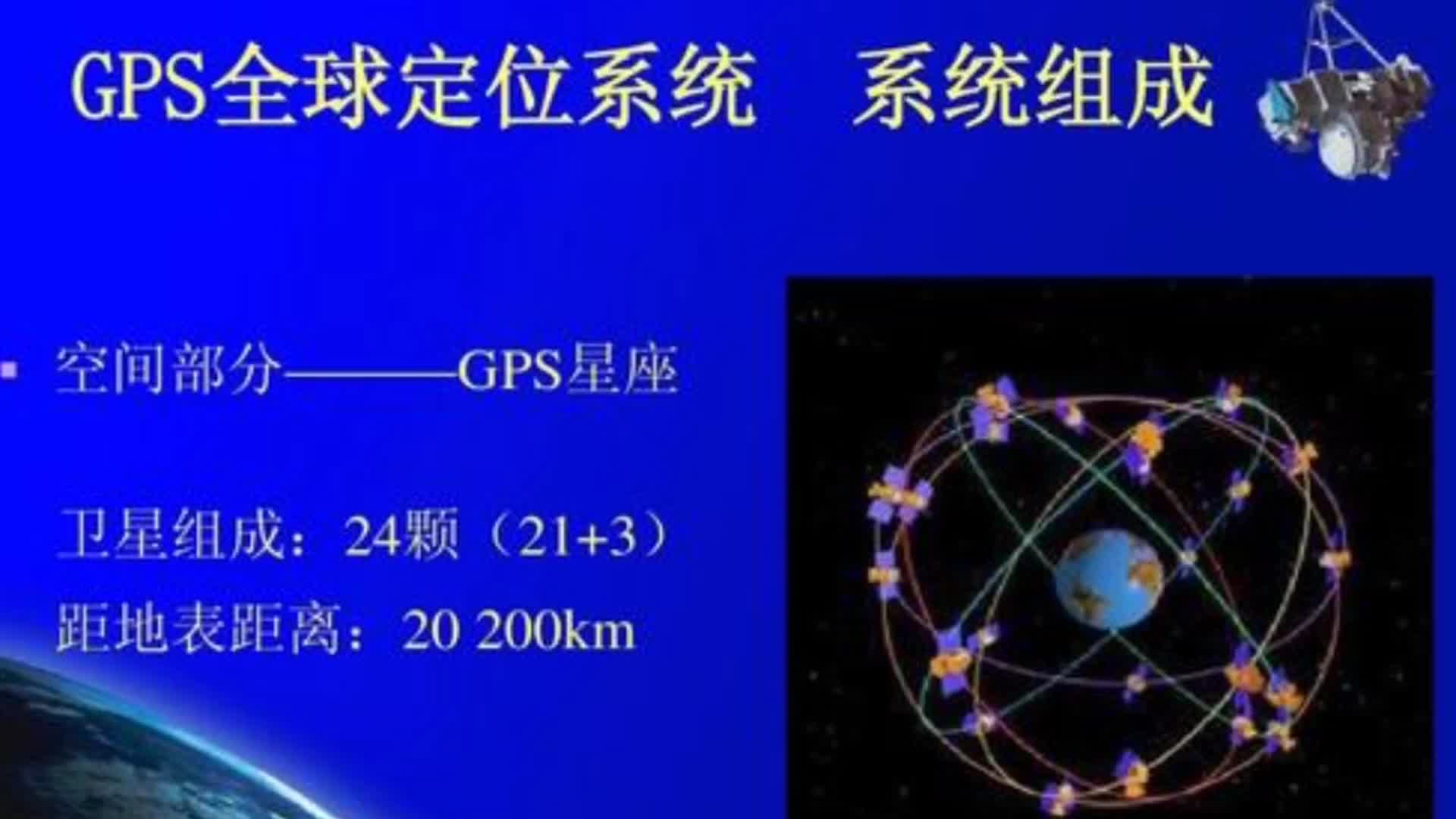
GPS定位的基本原理是,測量出已知位置的衛(wèi)星到地面GPS接收器之間的距離,然后接收器通過與至少4顆衛(wèi)星通訊,計算與這些衛(wèi)星間的距離,就能確定其在地球上的具體位置。普通GPS的定位精度 ≥ 1米,信號誤差有50%的概率會達(dá)到2米以上。這一點被手機GPS導(dǎo)航坑過的人肯定有所體會。另外,GPS無法支持精準(zhǔn)定高,誤差可能高達(dá)十幾米。
GPS定位誤差是怎么產(chǎn)生的呢?
1、大氣層影響:大氣層中的電離層和對流層對電磁波的折射效應(yīng),使得GPS信號的傳播速度發(fā)生變化,從而讓GPS信號產(chǎn)生延遲。
2、衛(wèi)星星歷誤差:由于衛(wèi)星運行中受到復(fù)雜的外力作用,而地面控制站和接收終端無法測定和掌握其規(guī)律,從而無法消除產(chǎn)生的誤差。
3、衛(wèi)星鐘差:衛(wèi)星鐘差是指GPS衛(wèi)星時鐘與GPS標(biāo)準(zhǔn)時間的差別。衛(wèi)星上使用銫原子鐘,所以兩者的時間也許不同步,就像你的手表跟你家客廳掛鐘的時間不同步一樣
4、多路徑效應(yīng):GPS信號也有可能是在不同的障礙物上反射后才被接收到,這就是所謂的“多路徑效應(yīng)”。
RTK (Real Time Kinematic), 即載波相位差分技術(shù),它能夠?qū)崟r地提供測站點在指定坐標(biāo)系中的三維定位結(jié)果,并達(dá)到厘米級精度。在RTK作業(yè)模式下,基站采集衛(wèi)星數(shù)據(jù),并通過數(shù)據(jù)鏈將其觀測值和站點坐標(biāo)信息一起傳送給移動站,而移動站通過對所采集到的衛(wèi)星數(shù)據(jù)和接收到的數(shù)據(jù)鏈進行實時載波相位差分處理(歷時不足一秒),得出厘米級的定位結(jié)果。
要理解RTK,得先知道“差分”是什么?
差分就是把GPS的誤差想方設(shè)法分離出。在已知位置的參考點上裝上移動基站,就能知道定位信號的偏差。將這個偏差發(fā)送給需要定位的移動站,移動站就可以獲得更精準(zhǔn)的位置信息。

作為「無人機之眼」的定位系統(tǒng),既是無人機實現(xiàn)自主飛行的關(guān)鍵,也是其進行各項植保作業(yè)的基礎(chǔ)。研發(fā)和設(shè)計高精度的定位系統(tǒng),一直是各大無人機廠商尋求技術(shù)突破的著力點。
目前無人機多采用GPS技術(shù),但GPS定位誤差帶來的坑早已在行業(yè)內(nèi)飽受詬病。
RTK技術(shù)原本是軍用技術(shù),2016年,極飛推出SUPER X2飛控系統(tǒng)和 P20 2017款植保無人機,搭載了GNSS RTK定位模塊。隨后,越來越多的無人機廠商開始投入到RTK產(chǎn)品的技術(shù)研發(fā)和系統(tǒng)整合中來。
一套RTK設(shè)備除了飛機上的定位模塊,還包括GNSS RTK手持測繪器、GNSS RTK移動基站和GNSS RTK固定基站。如下圖:
農(nóng)業(yè)植保無人機真的有必要使用比GPS定位更精準(zhǔn)的RTK嗎?
我們知道,我國農(nóng)田的田埂寬度普遍較小,且多丘陵、山地等復(fù)雜地形,對植保無人機飛行航線的精度要求很高。如果不能做到精準(zhǔn)噴灑,不僅達(dá)不到防治病蟲害的效果,甚至還可能產(chǎn)生藥害。傳統(tǒng)植保無人機正是由于GPS定位偏差,會有掉高、飛不直等現(xiàn)象,常常出現(xiàn)重噴、漏噴等問題,如何實現(xiàn)精準(zhǔn)噴灑一直是業(yè)內(nèi)不遺余力攻克的技術(shù)難題。
RTK技術(shù)的應(yīng)用,可以說讓植保無人機真正走上了精準(zhǔn)作業(yè)之路。
精準(zhǔn)作業(yè)體現(xiàn)在兩個維度:
一是飛得精準(zhǔn),即高精度自主飛行技術(shù)。通過RTK系統(tǒng)可獲取準(zhǔn)確的田地邊界信息,將航線精度從米級提升至厘米級,且不需要人工遙控,實現(xiàn)全自主飛行和噴灑;同時讓無人機自動避開房屋、樹木、電纜等障礙物,避免了碰撞和炸機事故。
二是噴得精準(zhǔn),可以通過精準(zhǔn)變量噴灑技術(shù)來達(dá)到,同時妥善地解決了以往因GPS定位偏差而造成的重噴、漏噴等問題。
如果說定位系統(tǒng)相當(dāng)于無人機的「眼睛」,那GPS好比是「近視眼」,RTK則像是戴著高精度「智能眼鏡」的「明眸」,既能準(zhǔn)確識別各種障礙物,還能實時調(diào)整各種誤差,真正實現(xiàn)精準(zhǔn)定位。
RTK價格偏高,真的值得消費者掏錢買單嗎?
的確,RTK由于技術(shù)門檻高,價格并不「親民」,市面上一套優(yōu)質(zhì)RTK系統(tǒng)的價格可能相當(dāng)于一臺植保無人機了。但是,僅僅因為價格偏高,就足以成為拒絕使用新技術(shù)的理由嗎?
七八十年代,電腦剛在國內(nèi)出現(xiàn)時,也是大幾千甚至上萬的「天價」。但電腦的第一批用戶中,很多利用這一新工具,發(fā)現(xiàn)了更多創(chuàng)造更大價值的機會。一臺大型的農(nóng)業(yè)機械設(shè)備,價格可達(dá)幾十萬甚至上百萬,但農(nóng)業(yè)機械化的第一批踐行者,因為最快地走上了精準(zhǔn)、高效生產(chǎn)之路,從而最早實現(xiàn)了發(fā)家致富。
有時候,價格不是問題,關(guān)鍵在于你買的產(chǎn)品能否給你帶來相應(yīng)的價值回報。
聰明的消費者,不如拿出賬本好好算一算,一臺新設(shè)備的使用,能在多大程度上提高作業(yè)效率,能為你節(jié)省多少生產(chǎn)成本。
農(nóng)業(yè)植保服務(wù)的成本主要包括人工成本和設(shè)備成本。使用普通GPS的植保機,由于無法實現(xiàn)全自動飛行,需要三名操作人員,包括飛手、安全員和地勤,缺一不可。而一套裝有高精度RTK系統(tǒng)的植保機,只需一名操作人員即可完成全套作業(yè),人工成本降低至過去的三分之一。
在農(nóng)業(yè)植保領(lǐng)域,定位精度正是提高系統(tǒng)作業(yè)精度的關(guān)鍵限制因素,一方面,定位精度這一變量直接影響到航線規(guī)劃和藥劑噴灑精準(zhǔn)度等其它變量;另一方面,使用普通GPS的無人機在實際作業(yè)中的確受定位偏差影響很大,成為其明顯的短板。而將RTK技術(shù)應(yīng)用到植保無人機中,提高了飛行和噴灑的雙重精準(zhǔn)度,恰恰是突破這一關(guān)鍵限制因素的一劑良方。
隨著技術(shù)成本的降低,RTK系統(tǒng)大有可能成為行業(yè)應(yīng)用級無人機的標(biāo)配,也將在未來農(nóng)業(yè)植保中得到越來越廣泛的應(yīng)用。
責(zé)任編輯人:CC
-
gps
+關(guān)注
關(guān)注
22文章
2967瀏覽量
168568 -
GPS定位
+關(guān)注
關(guān)注
4文章
81瀏覽量
22917
發(fā)布評論請先 登錄
基于FPGA的GPS和GSM雙重車載定位系統(tǒng)設(shè)計

[分享]GPS理論基礎(chǔ)知識 GPS定位誤差源
一文看懂GPS模塊定位原理、特點及應(yīng)用
北斗定位、GPS定位、WiFi定位、基站定位、藍(lán)牙定位幾種定位方式比較
單點GPS定位誤差建模研究
基于非線性濾波算法的單機GPS定位研究
水下GPS定位誤差分析

雙頻GPS載波相位相對定位精度分析與評估
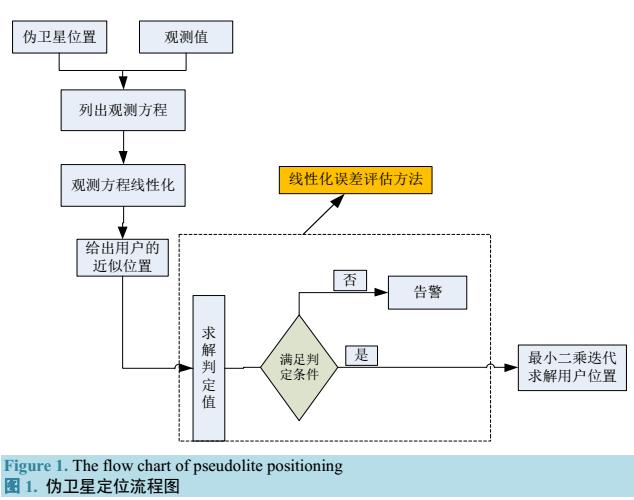
偽衛(wèi)星定位線性化誤差評估方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論