") KUKAC4機器人使用的Dual NIC網(wǎng)卡
KUKAC4機器人使用的Dual NIC網(wǎng)卡
l網(wǎng)卡(英文縮寫為 NIC)是連接電腦與本地網(wǎng)絡(luò)的電子線路。
l每塊網(wǎng)卡都擁有全球獨一無二的識別碼,即 MAC 地址 MAC 地址。該地址可從網(wǎng)卡上直接讀取,也可利用其它工具 (ipconfig)讀取。
l如今越來越多的高端網(wǎng)卡使用 1000 MBit 的傳輸速度。它們采用配備 RJ45 插頭的雙絞線電纜 (1000BASE-T)來連接。
l普通網(wǎng)卡只擁有一個以太網(wǎng)接口,特殊網(wǎng)卡會擁有多個(多達四個)。
DualNic - B 型網(wǎng)卡
庫卡網(wǎng)卡 Dual NIC
lDual NIC 是一種包含兩個 1000 Mbit/s 局域網(wǎng)適配器的網(wǎng)卡,
l它們是兩個 VLAN。
l第二個端口與 PC 型號相關(guān):
l主板 D2608-K KLI -KUKA 線路接口
l主板 D3076-K KSB - KUKA 系統(tǒng)總線
l在 KR C4 中,Dual NIC 在設(shè)備管理器里面不顯示在網(wǎng)絡(luò)適配器下。
l此卡不由 Windows 管理,不在 Windows 中進行參數(shù)配置,而是由 KUKA 實時操作系統(tǒng) VX-Works 進行管理。
l因此全部網(wǎng)絡(luò)適配器均在 KUKA Realtime OS Device 下顯示。
l但是只有 KLI 端口(庫卡線路接口)才可直接在庫卡 HMI 上接受參數(shù)設(shè)定。
l在 KR C4 中,DualNIC 在設(shè)備管理器里面不是顯示在 【網(wǎng)絡(luò)適配器】之下。該網(wǎng)卡不受 Windows、而受庫卡實時操作系統(tǒng) VX-Works 的管理,也不在 Windows 里進行參數(shù)設(shè)置。因此所有網(wǎng)絡(luò)適配器都是顯示在庫卡 【Realtime OS Devices】項下。但是只有 KLI 端口 (庫卡線路接口)才可直接在庫卡 HMI 上接受參數(shù)設(shè)定。

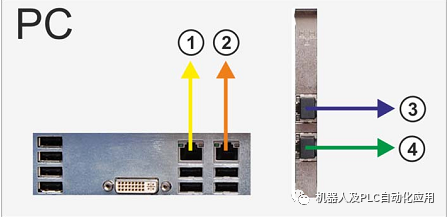
1 KONI - 庫卡選項網(wǎng)絡(luò)接口
2 KLI - 庫卡線路接口 (KLI - KUKA Line Interface) 用于PROFINET網(wǎng)絡(luò)控制
3 KSB - KUKA 系統(tǒng)總線
4 KCB - KUKA 控制器總線
責(zé)任編輯:lq
-
控制器
+關(guān)注
關(guān)注
114文章
16998瀏覽量
183148 -
機器人
+關(guān)注
關(guān)注
213文章
29537瀏覽量
211758 -
總線
+關(guān)注
關(guān)注
10文章
2953瀏覽量
89407
原文標題:KUKA C 4網(wǎng)卡DualNic的功能
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論