 能勾勒出任何圖像輪廓的四軸機械臂設計方案
能勾勒出任何圖像輪廓的四軸機械臂設計方案
Roboartist是一個四軸的機械臂,可以使用Edgestract(我們定制的邊緣檢測算法),使用鋼筆/鉛筆在A3紙上勾勒出任何圖像的輪廓。該項目依靠核心引擎從上傳的圖像中提取邊緣進行處理。Arduino Mega通過USB /藍牙端口使用從MATLAB發送的信息來控制伺服器。
硬件
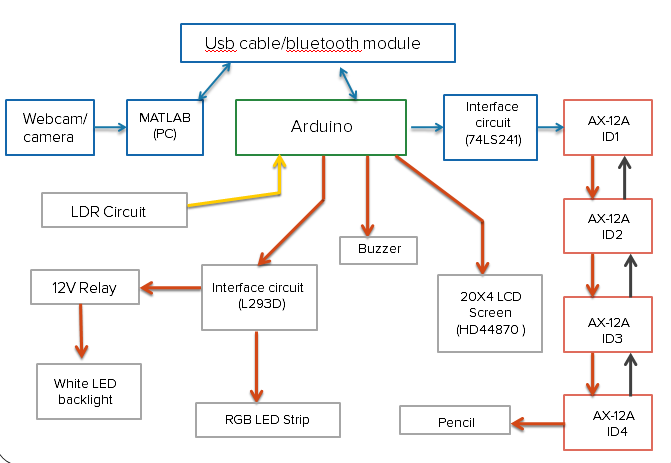
硬件的基本布局如上所述。圖像采集是通過網絡攝像頭或照相機實現的。我們還允許掃描現有的JPEG。盡管并非必須要使用RGB LED燈條和LCD屏幕,但我們只是出于娛樂目的而將其投入使用。真正改善產品設計的是由LED燈條構成的白色LED背光燈。光線透過紙張擴散,為Roboartist的演奏提供了良好的光環。
軟件
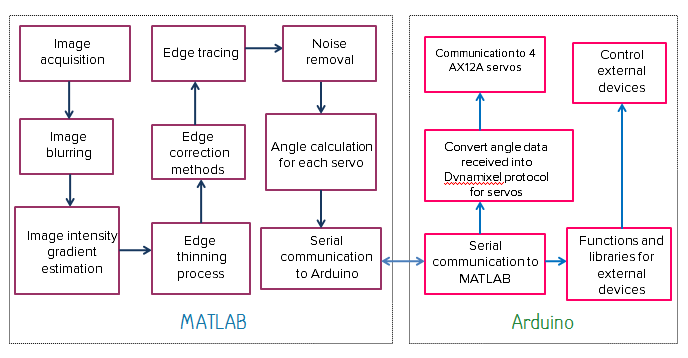
這是軟件的結構。基本思想是讓MATLAB承擔所有繁重的工作,而讓Arduino專注于揮舞鉛筆。該程序要求用戶控制一些參數以消除噪聲并獲得良好的邊緣輸出。完成后,程序將與Arduino通信。
快速瀏覽涉及的圖像處理階段:
每個切片都來自一系列連續的DIP階段。最初我們一直使用Canny邊緣檢測算法,但是現在我們已經構建并切換到Edgestract(一種更優化的繪圖算法)。我們一直在對各種類型的圖像運行該算法并記錄結果。
責任編輯:xj
原文標題:能勾勒出任何圖像輪廓的四軸機械臂
文章出處:【微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機械臂
+關注
關注
13文章
544瀏覽量
25225 -
四軸
+關注
關注
0文章
39瀏覽量
13652
原文標題:能勾勒出任何圖像輪廓的四軸機械臂
文章出處:【微信號:cirmall,微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
大象機器人成立于2016年,專注協作機器人研發與應用,產品線涵蓋輕量級協作機器人、人形機器人、仿生機器人等多種形態。拳頭產品myCobot系列以“全球最輕的六軸機械臂”聞名,累計銷量超數萬臺,覆蓋
發表于 04-25 17:59
鈞敏科技SME200離軸磁性編碼器IC的應用案例
科技深耕編碼器領域,推薦的 SME200 離軸磁性編碼器 IC,憑借獨特的技術和出色的性能,為機械臂關節控制的諸多難題提供了切實可行的解決方案。
專為機器人教育而設計的創客友好型機械臂
案例,該案例由Elephant Robotics作為官方解決方案提供,使用戶能夠快速上手并逐步跟進,以查看如何重現結果并識別任何潛在問題。 設備 myCobot 320 M5Stack myCobot 320 M5Stack是six-degree-of-freedom的

如何使用PLC控制myCobot 320機械臂
根據持續的用戶反饋,目前市場對 PLC 與 myCobot 系統集成的需求很大,因此本文提供的案例介紹了如何使用 PLC(可編程邏輯控制器)來控制 myCobot 320 機械臂。本案例重點介紹

使用myCobot 280機械臂結合ROS2系統搭建機械分揀站
這篇文章是來自Automatic Addison的開源項目,已獲作者授權轉載自github。本項目的主要內容是使用myCobot 280機械臂結合ROS2系統搭建機械分揀站。

模具輪廓掃描與測量綜合解決方案
模具輪廓掃描方案集成了高精度的光學鏡頭模組、優化的光學系統、先進的光譜傳感器模組以及功能強大的圖像測量軟件,以實現模具輪廓的快速、準確掃描和測量。
RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
基于語音控制實現機械臂特定動作的方法。三、實驗原理程序功能通過語音控制機械臂實現特定復雜動作:機械臂

凌科電氣新品發布:揭秘機械臂高可靠連接器解決方案
機械臂因其卓越的精準性、智能化水平和高效工作能力,廣泛應用于工業制造、物流倉儲、醫療手術等多個領域。其中,在機械臂高效運行的背后,工業級連接器在保障設備穩定運行方面發揮著重要作用。
機械臂的高效運作,連接器起關鍵作用
了眾多危險、重復的工作。 機械臂的工作原理 ? ? ?機械臂的運動控制是通過控制電機和傳動裝置來實現的。控制電機的作用是將電能轉換為機械能,
OrangePi AIpro應用:機械臂應用開發指南
2024世界人工智能大會上,香橙派攜OrangePiAIpro20T在世博展覽館H1-A301展區亮相,給大家帶來AI+互動的沉浸式體驗。其中,搭載OrangePiAIpro開發板的智能機械臂吸引了

工業機器人和機械臂的設計、功能和應用有哪些區別?
自動化設備,專門用于在工業生產線或其他工業環境中執行各種操作任務。它們通常具備多軸關節結構,能夠在三維空間內自由移動,并搭載各種工具、夾具或傳感器來完成特定的任務。 工業機器人和機械臂都屬于自動化設備,用于執行
奧比中光推出2.0版大模型機械臂
近期,奧比中光研發團隊融合前沿多模態大模型技術,推出最新2.0版大模型機械臂演示方案。新方案搭載公司最新深度相機Gemini 335L和Femto Bolt,能夠基于語音指令,自動執行
大象機器人開源協作機械臂機械臂接入GPT4o大模型!
本文已經或者同濟子豪兄作者授權對文章進行編輯和轉載 引言 隨著人工智能和機器人技術的快速發展,機械臂在工業、醫療和服務業等領域的應用越來越廣泛。通過結合大模型和多模態AI,機械臂能夠實

干貨!國產Cortex-A55人工智能實驗箱機械臂積木搬運實驗案例
TL3568-PlusTEBAI人工智能實驗箱重磅襲來!基于Python機械臂積木搬運一、實驗目的本實驗通過TL3568-PlusTEB教學實驗箱操作機械臂把不同顏色的





 工商網監
工商網監
評論