 干貨!國產Cortex-A55人工智能實驗箱機械臂積木搬運實驗案例
干貨!國產Cortex-A55人工智能實驗箱機械臂積木搬運實驗案例
人工智能實驗箱重磅襲來!
一、實驗目的
本實驗通過TL3568-PlusTEB教學實驗箱操作機械臂把不同顏色的四個積木從下到上按照藍綠紅黃的順序疊起來放到中間灰色的方塊上。
二、實驗原理
機械臂自由度
機械手自由度,是指傳送機構機械手的運動靈活性。通常把傳送機構的運動稱為傳送機構的自由度。
人從手指到肩部共有27個自由度。而如將機械手的手臂也制成這樣多的自由度,既困難又不必要。
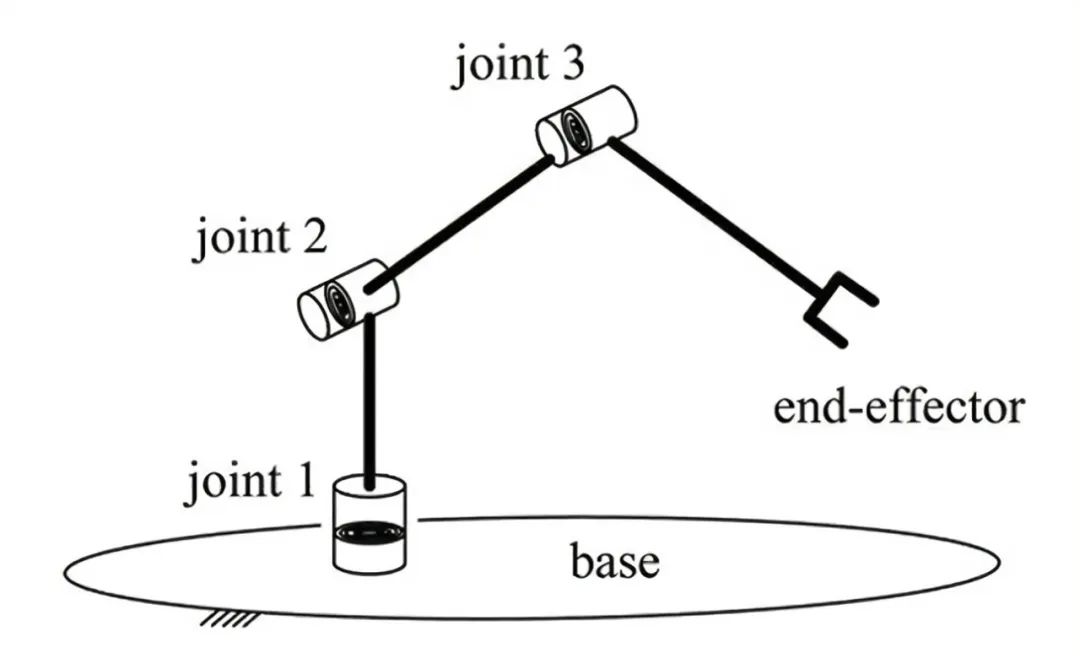
從力學的角度分析,物件在空間只有6個自由度。因此為抓取和傳送在空間不同位置和方位物件,傳送機構也應具有6個自由度。
實驗程序流程
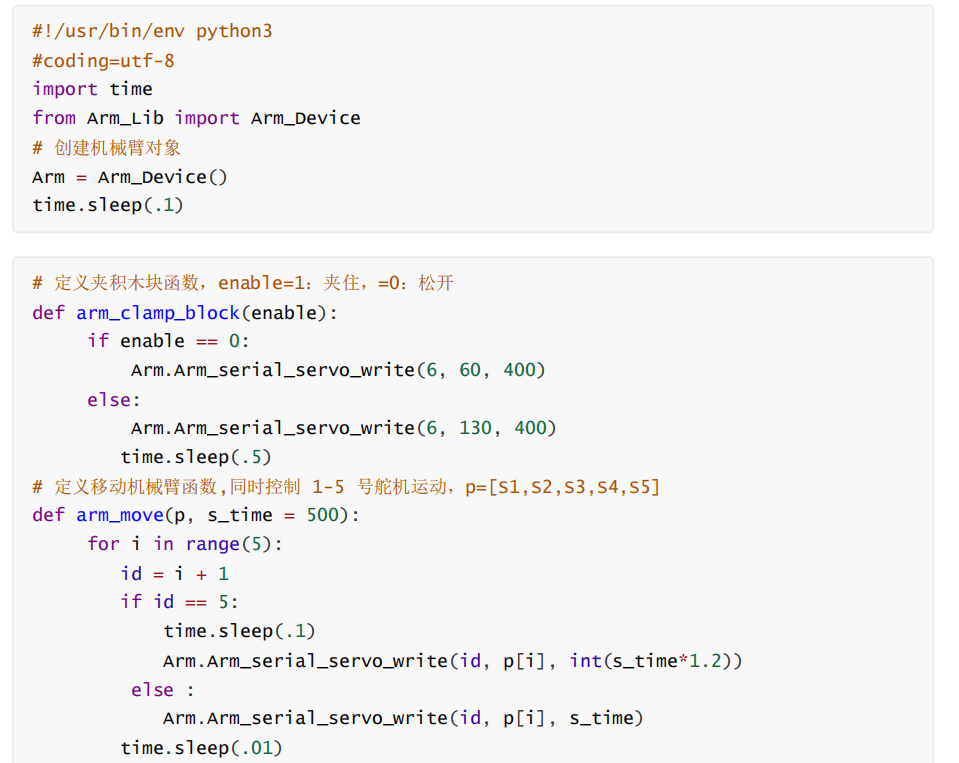
1、創建機械臂對象
2、定義夾積木塊函數
3、定義移動機械臂函數,同時控制 1-5 號舵機運動
4、機械臂向上移動
5、定義不同位置的變量參數
6、讓機械臂移動到一個準備抓取的位置
7、夾取實現搬運積木
三、操作現象
人工智能實驗箱重磅襲來!
基于 Cortex-A55 教學實驗室建設方案
RK3568國產化高性能處理器
2.0GHz超高主頻
1T超高算力NPU






多元化教學專業與課程
教學專業 | 教學課程 |
人工智能 | 《人工智能》 |
自動化 | 《嵌入式系統設計》 |
物聯網工程 | 《ARM系統開發》 |
計算機科學與技術 | 《無線傳感器網絡》 |
光電信息工程 | 《移動互聯網技術》 |
通信工程 | 《物聯網設計方法與應用》 |
電子信息工程 |
嵌入式基礎實驗
第一章
ARM實驗環境搭建與Linux開發基礎
第二章
Linux 設備驅動程序開發實驗
第三章
Linux 設備驅動程序開發實驗
第四章
基于ARM基礎外設實驗
第五章
Linux Qt 開發實驗
第六章
Linux Python 開發實驗
人工智能實驗
第一章
Python基礎章節實驗
第二章
圖像處理(Python OpenCV)實驗
第三章
深度學習實驗
第四章
機械學習實驗
第五章
機器控制實驗
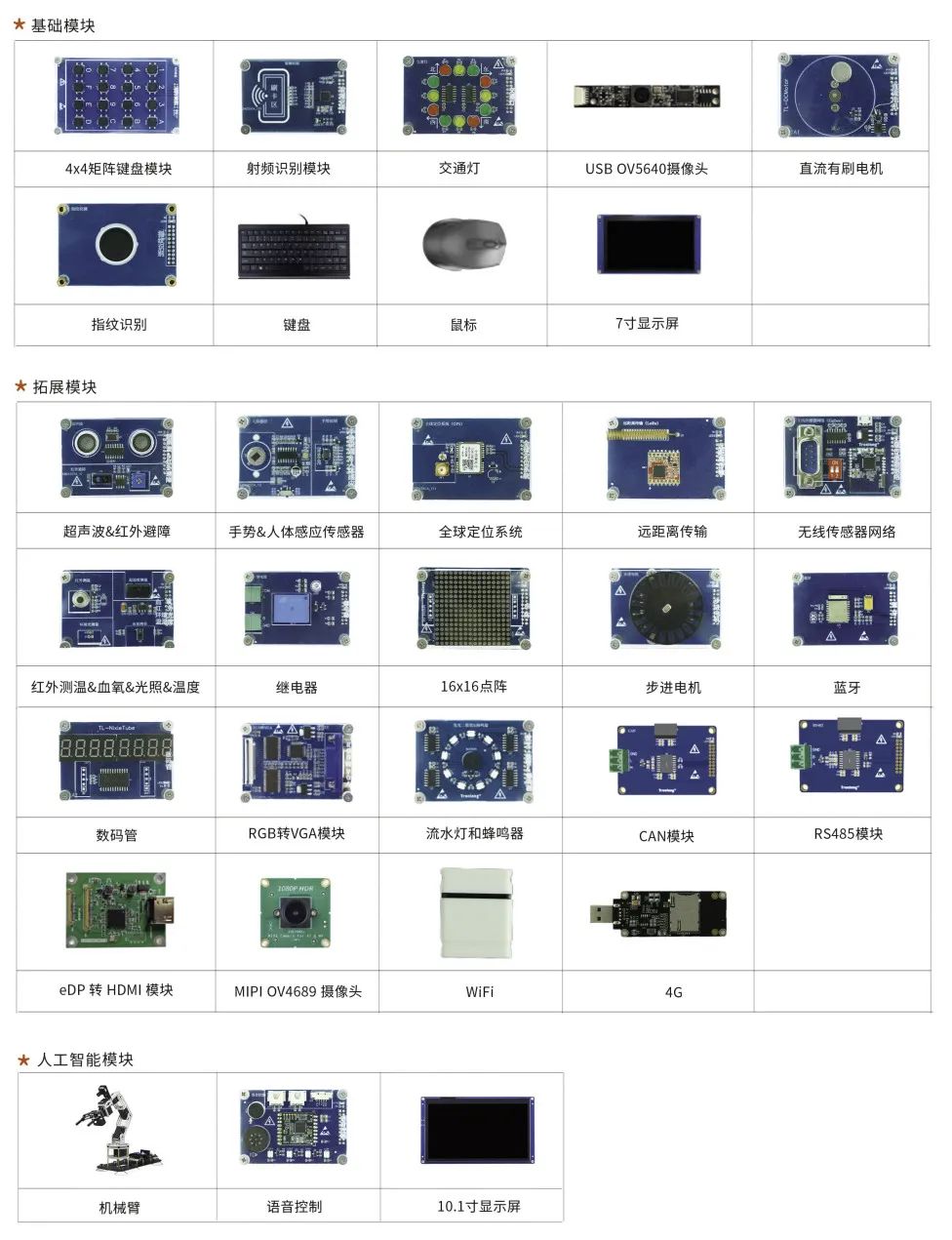
30+拓展模塊任意搭配
-
人工智能
+關注
關注
1804文章
48783瀏覽量
246888 -
實驗箱
+關注
關注
0文章
69瀏覽量
9293 -
機械臂
+關注
關注
13文章
547瀏覽量
25248
發布評論請先 登錄
深度解析!RK3568 加持機械臂是如何實現顏色識別與抓取的?

RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
國產芯RK3568教學實驗箱操作案例:顏色識別抓取積木
Cortex-A55 處理器到底什么來頭?創龍教儀一文帶您了解
RK3568人工智能教學實驗箱操作案例分享:5-37 ADC波形顯示實驗
國產Cortex-A55實驗箱:輕松上手,人工智能環境搭建教程
國產人工智能教學實驗箱操作案例分享:5-27 指紋識別實驗
Cortex-A55人工智能教學實驗箱操作教程_案例分享:5-26 血氧檢測實驗
Cortex-A55國產處理器_教學實驗箱_操作案例分享:5-21 手勢識別實驗
OrangePi AIpro應用:機械臂應用開發指南

干貨!國產Cortex-A55人工智能實驗箱機械臂跳舞實驗案例





 工商網監
工商網監
評論