") 自動駕駛汽車的視覺傳感器攝像頭介紹
自動駕駛汽車的視覺傳感器攝像頭介紹

對于自動駕駛汽車來說,傳感器有很多種,而視覺傳感器“攝像頭”就屬于傳感器中價格相對便宜且功能很重要的一種,被稱為“智能汽車之眼”。今天小編先帶大家對攝像頭作一個基礎(chǔ)介紹。
01攝像頭定義
攝像頭(CAMERA或WEBCAM)又稱為電腦相機(jī)、電腦眼、電子眼等,是一種視頻輸入設(shè)備,它就像我們?nèi)说难劬σ粯樱梢詫⒖吹降恼鎸?shí)環(huán)境記錄,以數(shù)據(jù)形式存儲。
說起攝像頭大家其實(shí)并不陌生,因?yàn)槲覀兩钪薪?jīng)常在使用,比如手機(jī)、數(shù)碼相機(jī)、電腦上的攝像頭,汽車上的攝像頭,還有馬路上交通違章攝像頭,小區(qū)、銀行和商場監(jiān)控?cái)z像頭等等。
02攝像頭原理
攝像頭一般具有視頻攝像和靜態(tài)圖像捕捉等基本功能,它借由鏡頭采集圖像(光信號)后,由攝像頭內(nèi)的感光組件電路及控制組件對圖像進(jìn)行處理并轉(zhuǎn)換成電腦所能識別的數(shù)字信號,然后借由并行端口或USB連接輸入到電腦后由軟件再進(jìn)行圖像還原。
攝像頭原理圖:機(jī)械工業(yè)出版社《自動駕駛改變未來》
03攝像頭組件
攝像頭的主要組件有:
3.1鏡頭組
鏡頭組(lens),由光學(xué)鏡片、濾光片和保護(hù)膜等組成。
透鏡分兩類,有塑膠透鏡(Plastic)及玻璃透鏡(Glass)。
3.2圖像傳感器(ImageSensor),可以分為兩類:CCD與CMOS傳感器。
CCD(ChargeCoupled Device):電荷耦合器件,可直接將光學(xué)信號轉(zhuǎn)換為模擬電流信號,電流信號經(jīng)過放大和模數(shù)轉(zhuǎn)換,實(shí)現(xiàn)圖像的獲取、存儲、傳輸、處理和復(fù)現(xiàn)。一般是用于攝影攝像方面的高端技術(shù)元件。
CMOS(ComplementaryMetal-OxideSemiconductor):中文學(xué)名為互補(bǔ)金屬氧化物半導(dǎo)體,它本是計(jì)算機(jī)系統(tǒng)內(nèi)一種重要的芯片,保存了系統(tǒng)引導(dǎo)最基本的資料。CMOS的制造技術(shù)和一般計(jì)算機(jī)芯片沒什么差別,主要是利用硅和鍺這兩種元素所做成的半導(dǎo)體,使其在CMOS上共存著帶N(帶-電)和P(帶+電)級的半導(dǎo)體,這兩個互補(bǔ)效應(yīng)所產(chǎn)生的電流即可被處理芯片記錄和解讀成影像。后來發(fā)現(xiàn)CMOS經(jīng)過加工也可以作為數(shù)碼攝影中的圖像傳感器。
CCD與CMOS傳感器,兩者都是利用感光二極管(photodiode)進(jìn)行光電轉(zhuǎn)換,將圖像轉(zhuǎn)換為數(shù)字?jǐn)?shù)據(jù),而其主要差異是數(shù)字?jǐn)?shù)據(jù)傳送的方式不同。CCD傳感器中每一行中每一個像素的電荷數(shù)據(jù)都會依次傳送到下一個像素中,由最底端部分輸出,再經(jīng)由傳感器邊緣的放大器進(jìn)行放大輸出;而在CMOS傳感器中,每個像素都會鄰接一個放大器及A/D轉(zhuǎn)換電路,用類似內(nèi)存電路的方式將數(shù)據(jù)輸出。
簡單講CMOS的信號是以“點(diǎn)”為單位的電荷信號,而CCD是以“行”為單位的電流信號。
DSP芯片,也稱數(shù)字信號處理器,是一種具有特殊結(jié)構(gòu)的微處理器。DSP的功能主要是通過一系列復(fù)雜的數(shù)學(xué)算法運(yùn)算,對由CMOS傳感器來的數(shù)字圖像信號進(jìn)行優(yōu)化處理,并把處理后的信號通過USB等接口傳到PC設(shè)備,是攝像頭的核心設(shè)備。
04攝像頭參數(shù)
4.1像素(Resolution)是由一個數(shù)字序列表示圖像中的一個最小單位。如下面四維圖新logo就是由一個個小方格子像素組成的。
4.2分辨率
分辨率是用于度量位圖圖像內(nèi)數(shù)據(jù)量多少的一個參數(shù),表示成dpi(DotsPerInch,每英寸點(diǎn)或像素?cái)?shù))。它是衡量攝像頭的一個重要指標(biāo)之一,通常來說攝像頭的最高分辨率越高(即像素點(diǎn)數(shù)量),拍攝出來的圖像品質(zhì)就越好。
方便了解,我們直觀對比一下最高分辨率對圖像的影響。
30萬像素CMOS的分辨率為640×480=307200像素;
100萬像素(720p)的分辨率為1280x720=921600像素;
200萬像素(1080p)的分辨率為1920x1080=2073600像素;
800萬像素是1080p的四倍面積,被稱為4K;
1600萬像素是1080p的8倍面積,被稱為8K。
仍以上面四維圖新logo為例,像素低的如左圖,像素高的如右圖,我們可以發(fā)現(xiàn)最高分辨率越高,像素?cái)?shù)越多,圖像越清晰。
4.3色域
色域(ColorGamut或ColorSpace)是對一種顏色進(jìn)行編碼的方法,也指一個技術(shù)系統(tǒng)能夠產(chǎn)生的顏色的總和。最常用的兩種圖像格式是RGB24和I420。
RGB24:RGB即代表紅、綠、藍(lán)三個通道的顏色變化以及它們相互之間的疊加來得到各式各樣的顏色,這個標(biāo)準(zhǔn)幾乎包括了人類視力所能感知的所有顏色,是目前運(yùn)用最廣的顏色系統(tǒng)之一。RGB24圖像每個像素用8bit(比特位)表示,RGB24一幀的大小size=width×heigth×3 Byte(字節(jié))。最多可表現(xiàn)256級濃淡,從而可以再現(xiàn)256*256*256種顏色。
I420:是YUV格式之一,YUV模型是根據(jù)一個亮度(Y分量)和兩個色度(UV分量)來定義顏色空間。I420(即YUV標(biāo)準(zhǔn)格式4:2:0)的數(shù)據(jù)量是 size=width×heigth×1.5 Byte(字節(jié))。
其它格式還有:RGB565,RGB444,YUV42等。
4.4自動白平衡調(diào)整
定義:要求在不同色溫環(huán)境下,照白色的物體,屏幕中的圖像應(yīng)也是白色的。色溫表示光譜成分,光的顏色。色溫低表示長波光成分多。當(dāng)色溫改變時,光源中三基色(紅、綠、藍(lán))的比例會發(fā)生變化,需要調(diào)節(jié)三基色的比例來達(dá)到彩色的平衡。
4.5彩色深度
反映對色彩的識別能力和成像的色彩表現(xiàn)能力,實(shí)際就是A/D轉(zhuǎn)換器的量化精度,是指將信號分成多少個等級。常用色彩位數(shù)(bit)表示。彩色深度越高,獲得的影像色彩就越艷麗動人。市場上的攝像頭均已達(dá)到24位,有的甚至是32位。
4.6圖像噪音
指的是圖像中的雜點(diǎn)干擾。表現(xiàn)為圖像中有固定的彩色雜點(diǎn)。如下圖中紅色方框中的黃色像素點(diǎn)即為圖像噪音。
圖像噪音樣式
4.7視角
鏡頭中心點(diǎn)到成像平面對角線兩端所形成的夾角就是鏡頭視角,對于相同的成像面積,鏡頭焦距越短,其視角就越大。這個與人的眼睛成像是相同的,我們可以試著將手掌(如下圖黃色方框)放于眼前正前方10厘米處和30厘米處,10厘米時的視角(藍(lán)色線夾角)大于30厘米的視角(橘黃色線夾角)。
相同成像面積時的鏡頭視角圖
4.8幀率
幀率FPS(FramesPer Second)是指畫面每秒傳輸幀數(shù),通俗來講就是指動畫或視頻的畫面數(shù),即每秒拍攝了多少張照片。比如我們目前看到的大部分電影都是采用24fps(或者23.98fps)拍攝和放映,也就是每秒拍攝/放映24張照片。
五、攝像頭在自動駕駛中的應(yīng)用
上述說了這么多攝像頭的原理和基礎(chǔ)參數(shù),那么攝像頭是如何幫助自動駕駛工作的呢?
簡單來說,攝像頭就是扮演了“車的眼睛”。
我們以前也提過,自動駕駛其實(shí)就是讓車擁有人腦的工作,而駕駛過程中,我們?nèi)藭鶕?jù)看到的景象進(jìn)行感知,同時形成認(rèn)知并傳遞給大腦,大腦會根據(jù)感知到的結(jié)果進(jìn)行分析和決策,從而讓手和腳去操作。
聽起來挺簡單的原理,其實(shí)是個十分復(fù)雜的過程,舉個例子,比如說我們打開搜索網(wǎng)站搜索“桌子”,會發(fā)現(xiàn)有很多種的樣子。
我們會發(fā)現(xiàn),不管桌子是方是圓,是黑是白,那么我們?nèi)祟悘?qiáng)大的大腦會迅速地知道它是一張桌子。
但如果換作計(jì)算機(jī),我們就需要通過攝像頭作為輸入,通過AI算法讓汽車知道這是什么。
結(jié)語:
在ADAS層面,其實(shí)我們目前汽車的一些功能如行人探測與防撞預(yù)警、車道保持和偏離預(yù)警等功能都有攝像頭的參與,而目前針對L3及以上自動駕駛的功能,攝像頭更是重要的傳感器之一。
原文標(biāo)題:新·知丨自動駕駛傳感器那點(diǎn)事之 攝像頭基礎(chǔ)介紹
文章出處:【微信公眾號:四維圖新NavInfo】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
傳感器
+關(guān)注
關(guān)注
2565文章
52954瀏覽量
767022 -
攝像頭
+關(guān)注
關(guān)注
61文章
4976瀏覽量
98305 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14308瀏覽量
170542
原文標(biāo)題:新·知丨自動駕駛傳感器那點(diǎn)事之 攝像頭基礎(chǔ)介紹
文章出處:【微信號:realnavinfo,微信公眾號:四維圖新NavInfo】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
自動駕駛汽車如何正確進(jìn)行道路識別?

自動駕駛汽車是如何準(zhǔn)確定位的?

自動駕駛汽車如何確保感知數(shù)據(jù)的一致性?

自動駕駛中純視覺替代不了激光雷達(dá)?
一文聊聊自動駕駛攝像頭

全球攝像頭模組和傳感器CMOS主要廠商

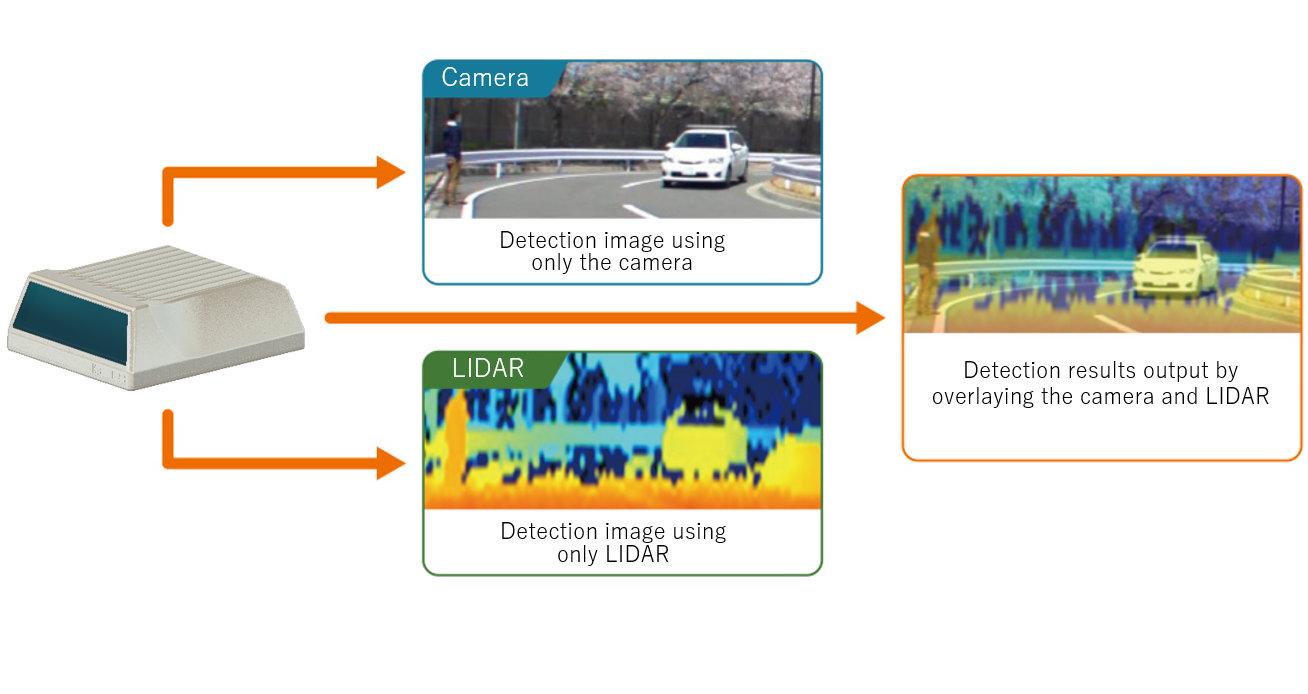
激光雷達(dá)+攝像頭融合傳感器,有沒有搞頭?
攝像頭捕獲 2D 圖像,深度傳感器拉長距離

MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
微測輻射熱計(jì)陣列的紅外攝像頭,用于提高自動駕駛的安全性
聚焦MIPI 系列之三:汽車SerDes – 實(shí)現(xiàn)更好的ADAS攝像頭傳感器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論