") 基于Giotto編程技術(shù)實(shí)現(xiàn)嵌入式控制系統(tǒng)的應(yīng)用方案
基于Giotto編程技術(shù)實(shí)現(xiàn)嵌入式控制系統(tǒng)的應(yīng)用方案

作者:雷萬(wàn)軍,張?jiān)粕惙f,陳輝
1 引 言
隨著計(jì)算機(jī)技術(shù)、控制技術(shù)、信息技術(shù)的快速發(fā)展,工業(yè)的生產(chǎn)和管理方式進(jìn)入了生產(chǎn)自動(dòng)化、控制智能化時(shí)代,特別是分布嵌入式系統(tǒng)的應(yīng)用,更加需要標(biāo)準(zhǔn)化、實(shí)時(shí)的控制模塊和I/O功能模塊,以便系統(tǒng)集成,構(gòu)建適應(yīng)于惡劣環(huán)境的復(fù)雜分布式系統(tǒng)。實(shí)時(shí)嵌入式軟件模塊適合于沒(méi)計(jì)復(fù)雜的分布式系統(tǒng),它支持分布的、異構(gòu)設(shè)備的系統(tǒng)建摸和構(gòu)造。嵌入式模塊的作用是提供使復(fù)雜性容易處理的結(jié)構(gòu)和技術(shù),基于Giorio的嵌入式控制設(shè)汁更適合具有硬實(shí)時(shí)控制約束的應(yīng)用。本文中,平臺(tái)指硬件結(jié)構(gòu)、操作系統(tǒng)和通信協(xié)議,由CPU、傳感器、執(zhí)行器和網(wǎng)絡(luò)組成。與平臺(tái)無(wú)關(guān)的事件包括應(yīng)用功能和時(shí)限,與平臺(tái)相關(guān)的事件包括時(shí)序安排、通信和物理特性。
傳統(tǒng)的實(shí)時(shí)嵌入式軟件設(shè)計(jì)是在抽象的數(shù)學(xué)模型基礎(chǔ)上,控制工程師根據(jù)對(duì)象行為和環(huán)境影響,利用求解模型的軟件工具,得到模型的功能和性能,然后交給軟件工程師針對(duì)給定的平臺(tái)寫(xiě)出代碼,并在給定的平臺(tái)上檢驗(yàn)和優(yōu)化代碼,直到得出滿意的時(shí)間行為。在這個(gè)過(guò)程中,常常丟失了模型和代碼之間緊密的對(duì)應(yīng)關(guān)系,放棄了軟件的復(fù)硝性,增加了軟件設(shè)計(jì)的復(fù)雜度,因而產(chǎn)生的軟件是弱化的,難于在不同的平臺(tái)上應(yīng)用。
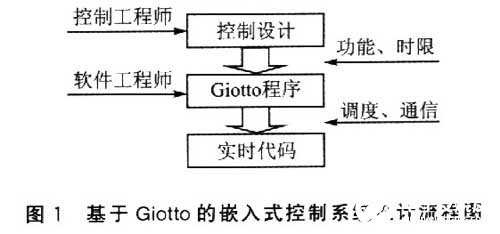
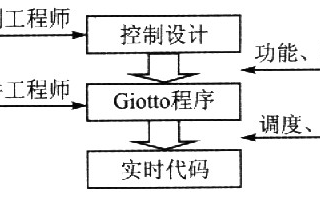
基于Giotto的嵌入式控制軟件設(shè)計(jì)將功能程序從特定平臺(tái)分離,將時(shí)限從功能中分離,其與平臺(tái)無(wú)關(guān)性使得它具有更好的實(shí)時(shí)性、可靠性及可復(fù)用性,更適合嵌入式實(shí)時(shí)分布系統(tǒng)。圖l為基于Giotto的嵌入式控制系統(tǒng)的設(shè)計(jì)流程圖。首先,控制工程師和軟件工程師就控制設(shè)計(jì)的功能和時(shí)限達(dá)成一致,設(shè)計(jì)一個(gè)Giotto程序;然后,軟件工程師使用Giotto編譯器產(chǎn)生一個(gè)可執(zhí)行代碼,該代碼能連接Giotto運(yùn)行時(shí)間庫(kù),將程序映射到給定的平臺(tái)。Giotto運(yùn)行時(shí)間庫(kù)提供一個(gè)時(shí)序安排和通信的中間層,這一層定義了Giotto可執(zhí)行程序與平臺(tái)之間的接口。目前已經(jīng)建立了一個(gè)Giotto運(yùn)行時(shí)間庫(kù),用于Intel x86機(jī)上Wind River的VxWorks實(shí)時(shí)操作系統(tǒng)。
3 Giotto編程技術(shù)
Giotto是一種與平臺(tái)無(wú)關(guān),且在特定控制領(lǐng)域應(yīng)用中具有高水平的編程語(yǔ)言。Giotto的設(shè)計(jì)用于高要求的控制應(yīng)用,這些應(yīng)用要求周期性地瀆取傳感器,調(diào)用任務(wù),更新執(zhí)行和模式轉(zhuǎn)換。Giotto基于時(shí)間觸發(fā)編程,從傳感器到CPU以及CPU到執(zhí)行器之問(wèn)的通信由全局時(shí)鐘觸發(fā),使其具有可預(yù)報(bào)性。Giotto程序不指定與平臺(tái)相關(guān)的部分,如優(yōu)先權(quán)、通信等。其優(yōu)點(diǎn)是與具體的執(zhí)行平臺(tái)無(wú)關(guān),能與任何實(shí)時(shí)操作系統(tǒng)、調(diào)度運(yùn)算法則以及實(shí)時(shí)通信協(xié)議兼容。
Giotto的兩個(gè)核心組成部分是:周期性的任務(wù)調(diào)用和模式轉(zhuǎn)換。一個(gè)Giotto程序指定一系列的模式,每一種模式又包含一系列的任務(wù)和模式轉(zhuǎn)換。每一時(shí)刻,程序都執(zhí)行在特定的模式P下,每個(gè)P模式轉(zhuǎn)換包含1個(gè)評(píng)估函數(shù)和1個(gè)目標(biāo)模式Q,只有評(píng)估函數(shù)為真時(shí)系統(tǒng)才轉(zhuǎn)換為新模式Q。
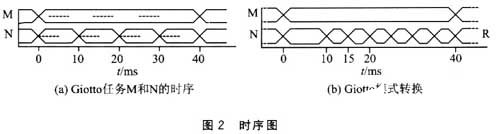
Giotto任務(wù)是一項(xiàng)劇期性的工作,其輸入和輸出端幾分別在任務(wù)周期的啟動(dòng)和結(jié)束時(shí)更新,但Giotto任務(wù)不一定要在周期開(kāi)始時(shí)啟動(dòng),只需在周期內(nèi)啟動(dòng)和完成。圖2(a)顯示了運(yùn)行在同一個(gè)CPU上的1個(gè)40ms任務(wù)M和1個(gè)10ms任務(wù)N的時(shí)序,虛線為目前任務(wù)占用CPU的可能情況。在第Oms,M和N都讀取它們輸入端口的值;在第10 ms,任務(wù)N的計(jì)算結(jié)果寫(xiě)入它的輸出端口,但是N早已結(jié)束執(zhí)行(如圖中虛線所示);在第40 ms,任務(wù)M的計(jì)算結(jié)果寫(xiě)入它的輸出端口,但任務(wù)M在第40ms之前已經(jīng)完成執(zhí)行。無(wú)論任務(wù)M在0~40 ms的任何時(shí)間完成計(jì)算,任務(wù)N都只會(huì)在第40 ms讀其結(jié)果。
在Giotto中一個(gè)任務(wù)可以看作是一個(gè)工作單元,一旦開(kāi)始,就必須要完成。任務(wù)周期沒(méi)結(jié)束時(shí),模式轉(zhuǎn)換不能終止任何任務(wù)。給定一個(gè)Giotto模式P(包括分別由40 ms和10 ms調(diào)用的Giotto任務(wù)M和N)和一個(gè)Giotto模式Q(包括分別由40ms和5ms調(diào)用的Giotto任務(wù)M和R)。圖2(b)顯示了在P模式中的第10ms模式轉(zhuǎn)換被激活的時(shí)序,此時(shí)模式P轉(zhuǎn)換為模式Q。由于P和Q都包含任務(wù)M,所以任務(wù)M不會(huì)終止,但任務(wù)N被周期為5ms的任務(wù)R代替。
4 物流系統(tǒng)自主小車(chē)設(shè)計(jì)
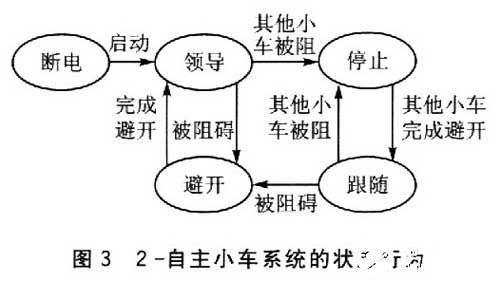
2一自主小車(chē)系統(tǒng)包括2個(gè)自主小車(chē),每個(gè)自主小車(chē)包含一個(gè)微處理器、馬達(dá)和觸摸式傳感器。設(shè)定在任何時(shí)候只有一個(gè)自主小車(chē)是領(lǐng)導(dǎo)者,而其他自主小車(chē)是跟隨者。其中,處于領(lǐng)導(dǎo)或避開(kāi)狀態(tài)的自主小車(chē)稱為“領(lǐng)導(dǎo)者”,處于跟隨或停止?fàn)顟B(tài)的自主小車(chē)稱為“跟隨者”。當(dāng)領(lǐng)導(dǎo)者被阻礙時(shí),領(lǐng)導(dǎo)者進(jìn)入避開(kāi)狀態(tài),跟隨者進(jìn)入停止?fàn)顟B(tài)。進(jìn)入避開(kāi)狀態(tài)的自主小車(chē)執(zhí)行一段避開(kāi)程序,以避開(kāi)障礙物,此時(shí)處于停止?fàn)顟B(tài)的自主小車(chē)仍停止;當(dāng)領(lǐng)導(dǎo)者完成避開(kāi)程序返回到領(lǐng)導(dǎo)狀態(tài)時(shí),跟隨者返回跟隨狀態(tài)。當(dāng)跟隨者之一被阻礙時(shí),該自主小車(chē)進(jìn)入避開(kāi)狀態(tài),其他所有的自主小車(chē)進(jìn)入停止?fàn)顟B(tài),被阻礙的這個(gè)自主小車(chē)成為新的領(lǐng)導(dǎo)者。圖3顯示了2一自主小車(chē)系統(tǒng)的狀態(tài)行為。
由于自主小車(chē)處于領(lǐng)導(dǎo)或避開(kāi)狀態(tài)時(shí)其他自主小車(chē)處于跟隨或停止?fàn)顟B(tài),因此對(duì)每一個(gè)領(lǐng)導(dǎo)者X使用1個(gè)LeildXFollow模式和1個(gè)EvadeXStop模式。其中,處于LeadlFollow模式時(shí),自主小車(chē)l是領(lǐng)導(dǎo)者;處于Evadelstop模式時(shí),自主小車(chē)l執(zhí)行避開(kāi)程序。另外,為每個(gè)自主小車(chē)X引入一個(gè)stopX模式,它允許自主小車(chē)快速停止。runCom1任務(wù)每40 ms運(yùn)行一次存儲(chǔ)于輸出端口 command中的命令。兩個(gè)Giotto任務(wù)rrailerCtrl和trailerCtr2具有l(wèi)Oms的周期,它們根據(jù)command中的命令控制兩個(gè)自主小車(chē)的馬達(dá);command中的數(shù)據(jù)由任務(wù)驅(qū)動(dòng)trailerDrv傳送到任務(wù)trailerCtrl和trailerCtr2的輸入端口。
系統(tǒng)分別對(duì)自主小車(chē)l和2的傳感器不斷地進(jìn)行檢測(cè)。當(dāng)自主小車(chē)1被阻礙時(shí),系統(tǒng)轉(zhuǎn)換到stopl模式。兩個(gè)自主小車(chē)都停止移動(dòng);完成stopl模式之后系統(tǒng)轉(zhuǎn)換為EvadelStop模式.此時(shí)自主小車(chē)l執(zhí)行 避開(kāi)程序而自主小車(chē)2停止不動(dòng)。類(lèi)似地,當(dāng)自主小車(chē)2被阻礙時(shí),自主小車(chē)2經(jīng)過(guò)stop2模式后轉(zhuǎn)換到Evade2Stop模式。在EvadelStop模式下,Evadel任務(wù)每一周期計(jì)算一次避開(kāi)動(dòng)作是否完成以及避開(kāi)的下一步動(dòng)作;具有10ms周期的任務(wù)trailerCtrl根據(jù)command中避開(kāi)的步驟去控制自主小車(chē)1的馬達(dá),一旦完成避開(kāi)動(dòng)作,就轉(zhuǎn)換為L(zhǎng)eadlFollow模式。
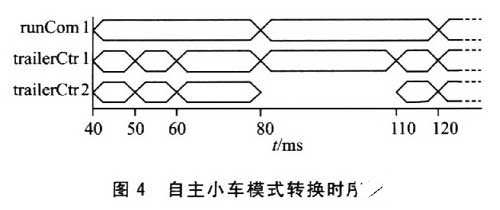
圖4為系統(tǒng)從LeadlFollow模式到stopl模式,EvadelStop模式和LeadlFollow模式的模式轉(zhuǎn)換時(shí)序圖。到stopl模式的轉(zhuǎn)換發(fā)生在LeadlFollow模式下的第60 ms,自主小車(chē)l的傳感器檢測(cè)到障礙,系統(tǒng)由LeadlFollow模式轉(zhuǎn)換為stopl模式.兩個(gè)自主小車(chē)執(zhí)行停止程序;完成stopl模式后,在第80 ms系統(tǒng)轉(zhuǎn)換為另外一個(gè)模式EvadelStop,自主小車(chē)1的控任務(wù)立刻被調(diào)用,自主小車(chē)l執(zhí)行避開(kāi)程序,此時(shí)自主小車(chē)2仍停止;當(dāng)自主小車(chē)1完成避開(kāi)動(dòng)作后,在第110ms,兩個(gè)自主小車(chē)的控制任務(wù)立刻被調(diào)用,系統(tǒng)轉(zhuǎn)換為L(zhǎng)eadlFollow模式。當(dāng)自主小車(chē)2是領(lǐng)導(dǎo)者時(shí),其模式轉(zhuǎn)換類(lèi)似。
5 結(jié)論
在基于Giotto的嵌入式控制設(shè)計(jì)中,時(shí)序程序與功能程序的分離,使Giotto程序與具體的運(yùn)行平臺(tái)無(wú)關(guān),從而提高了程序的健壯性、穩(wěn)定性及代碼的復(fù)用性。Giotto系統(tǒng)中任務(wù)的調(diào)用和環(huán)境變量的檢測(cè)由全局時(shí)鐘觸發(fā),其時(shí)間行為具有高度可預(yù)報(bào)性,使得Giotto非常適合具有硬實(shí)時(shí)約束的嵌入式控制系統(tǒng)。
責(zé)任編輯:gt
-
嵌入式
+關(guān)注
關(guān)注
5158文章
19730瀏覽量
318561 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6797瀏覽量
112289 -
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7679瀏覽量
90974
發(fā)布評(píng)論請(qǐng)先 登錄
Giotto編程技術(shù)、特點(diǎn)及實(shí)現(xiàn)嵌入式應(yīng)用設(shè)計(jì)
經(jīng)典UML狀態(tài)圖實(shí)用C++設(shè)計(jì)嵌入式系統(tǒng)事件驅(qū)動(dòng)型編程技術(shù)資料分享
如何去實(shí)現(xiàn)嵌入式網(wǎng)絡(luò)智能控制系統(tǒng)的設(shè)計(jì)?
嵌入式系統(tǒng)設(shè)計(jì)
嵌入式系統(tǒng)是什么意思
什么是嵌入式系統(tǒng)?
基于嵌入式實(shí)時(shí)操作系統(tǒng)的編程技術(shù)之資源同步介紹
PLC控制系統(tǒng)的編程技術(shù)
基于嵌入式操作系統(tǒng)的控制系統(tǒng)平臺(tái)設(shè)計(jì)

嵌入式Linux智能家居控制系統(tǒng)設(shè)計(jì)


嵌入式DSP系統(tǒng)C語(yǔ)言硬件編程技術(shù)簡(jiǎn)介

嵌入式DSP系統(tǒng)C語(yǔ)言硬件編程技術(shù)總結(jié)
嵌入式DSP系統(tǒng)C語(yǔ)言硬件編程技術(shù)
基于ARM嵌入式牙椅控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論