 香港中文大學開發出“FreeBOT”球形機器人
香港中文大學開發出“FreeBOT”球形機器人

香港中文大學的研究團隊開發了“FreeBOT”球形機器人,其大小比壘球略大,可以在平面上滾動并在墻壁和斜坡上攀爬。機器人彼此粘在一起,也可以彼此分開,并共同創造各種形狀和動作。
FreeBOT模塊是一個內部裝有磁鐵的球形機器人,它由兩部分組成:磁鐵球形殼體和內部驅動機構。內部驅動機構有兩個輪子,并由兩個直流電動機通過齒輪驅動。內輪在球殼中的位置通過電機控制,并且獨立在平面上滾動。強大的內部磁體允許在鐵磁壁上垂直移動。
原型的內部結構
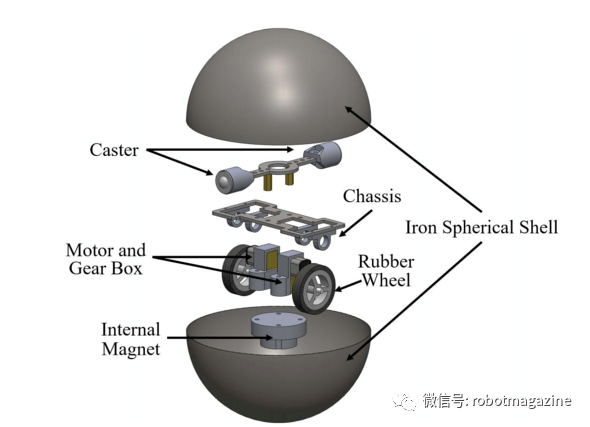
FreeBOT的分解圖
FreeBOT內部磁鐵很小,但是會產生很強的外部磁場。它集成了其他模塊,以便被磁場吸引,甚至在集成后也沿模塊移動。由于幾乎整個模塊都是接觸點,集成機器人組可以各種形狀移動。例如,兩個機器人可以一起工作以攀登非鐵磁紙板臺階,或攀登其他模塊(例如梯子)。
原文標題:一組球形協作移動的機器人“Free BOT”
文章出處:【微信公眾號:機器人技術與應用】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29718瀏覽量
212762
原文標題:一組球形協作移動的機器人“Free BOT”
文章出處:【微信號:robotmagazine,微信公眾號:機器人技術與應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
輪式移動機器人電機驅動系統的研究與開發
系統,開發了一套二輪差速驅動轉向移動機器人電機驅動系統,完成了系統各部件的整體裝配和調試。試驗結果表明,該設計方案可行、系統運行穩定可靠、成本低廉、所用元件易于購置,具有較好的實用的價值和應用前景。
純
發表于 06-11 14:30
明遠智睿SSD2351開發板:語音機器人領域的變革力量
在人工智能快速發展的今天,語音機器人逐漸成為人們生活和工作中的得力助手。明遠智睿SSD2351開發板憑借強大性能與豐富功能,為語音機器人的發展注入新動力,成為該領域的變革力量。 SSD2351
發表于 05-28 11:36
商湯科技與中國移動香港、香港中文大學法律學院簽署合作備忘錄
近日,商湯在香港分別與中國移動香港有限公司(以下簡稱“中國移動香港”)、香港中文大學法律學院簽署合作備忘錄,就視覺AI、大模型等領域展開深入
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
的cv_bridge庫,可以輕松實現ROS圖像消息與OpenCV格式的轉換,這在實際開發中極為便利。
視覺巡線與二維碼識別的應用
視覺巡線是機器人自主導航的經典案例,書中從仿真到真實機器人
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
《ROS 2智能機器人開發實踐》內容閱讀初體驗
《ROS 2 智能機器人開發實踐》是一本針對 ROS 2(Robot Operating System 2)這一先進
發表于 04-27 11:24
面向大學的樹莓派 RemoteLab 機器人開發!
大學生遠程機器人開發并非癡人說夢--在弗羅茨瓦夫科技大學,這已成為現實。在最新一期的《TheMagPi》中,RobZwetsloot與RemoteLab進行了交流。作為#MagPiMo

名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
的未來開辟了無限可能。
ROS 緣起
2007年,一群懷揣夢想的年輕人,正在斯坦福大學的機器人實驗室里進行一場頭腦風暴:如果可以開發一款硬件足夠強大的
發表于 03-03 14:18
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
需要專業程序員進行繁瑣的編程工作,這種方式不僅效率低下,還限制了機器人的應用場景。例如,在我們大學工程實訓課程中使用的數控機床,需要人為設定起點、終點、移動方向和移動距離等參數,自動化程度非常有限。而
發表于 12-29 23:04
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
的進步。自2000年中國國防科技大學研制出國內第一臺仿人型具身智能機器人“先行者”以來,國內在該領域的研究與開發工作逐漸加速。
“先行者”機器人
發表于 12-28 21:12
OpenAI探索人形機器人開發
前解散的內部機器人軟件團隊。 這一系列的舉措表明,OpenAI正在加大對機器人技術的投入,并尋求在這一領域取得突破。據兩名直接了解討論的人士透露,OpenAI最近甚至考慮開發一種類人機器人
普渡機器人與香港特區政府簽約成為重點企業伙伴
近日,香港特區政府引進重點企業辦公室(引進辦)舉辦第三批重點企業伙伴簽約儀式。在香港特別行政區財政司司長陳茂波見證下,普渡機器人作為全球服務機器人行業的領軍企業,正式成為





 工商網監
工商網監
評論