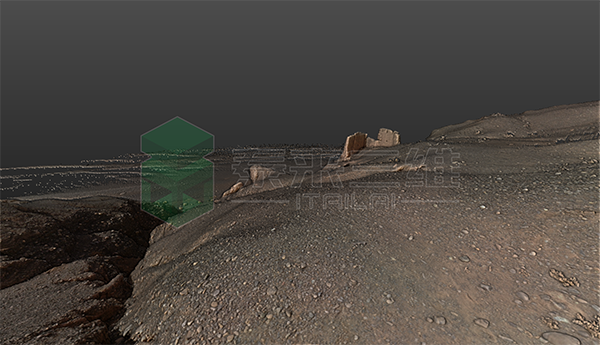
") 一款基于圖像和三維點(diǎn)云快速建模軟件
一款基于圖像和三維點(diǎn)云快速建模軟件
一款由于處理速度與數(shù)據(jù)精度優(yōu)勢(shì)而被業(yè)界廣泛應(yīng)用的軟件。
產(chǎn)品功能:
捕獲數(shù)據(jù)-導(dǎo)入
圖像-可識(shí)別的通用文件格式,如JPEG,PNG,TIFF,EXR,WEBP,BMP,DNG,RAW
視頻文件中捕獲幀-MPEG,AVI,ASF,QT, MOV,VMW
激光掃描-PTX,E57,PLY,ZFS and ZFPRJ
3D模型-OBJ, FBX, DXF, DAE
立體圖像-法如FARO FOCUS
飛支持圖像蒙版和不同層次的紋理或從AI分割
對(duì)準(zhǔn)-相機(jī)對(duì)準(zhǔn)
自動(dòng)登記注冊(cè)不同輸入-比如照片和激光掃描在一個(gè)步驟完成
創(chuàng)建地理參照或縮放場(chǎng)景的可能性
運(yùn)用XMP元數(shù)據(jù)重復(fù)使用相機(jī)注冊(cè)
網(wǎng)格
使用自定義細(xì)節(jié)生成水印3D網(wǎng)格
網(wǎng)格編輯工具-簡(jiǎn)化、平滑、閉合孔、網(wǎng)格清理
模型拓?fù)錂z查與修復(fù)工具
紋理
計(jì)算頂點(diǎn)顏色
使用內(nèi)置的打開工具創(chuàng)建UV地圖
計(jì)算UV和UDIMM格式的紋理模型
重新投影紋理從高多邊形到低多邊形模型
生成法線和位移圖
正射攝影DSM, DTM
創(chuàng)建地理參照的正投影和地圖
創(chuàng)建邊和任意投影
DSM and DTM的生成
創(chuàng)建采樣投影
分享和輸出
直接下載到Cesium Ion 和Sketchfab
輸出稀疏和稠密點(diǎn)云- XYZ, LAS, PTX
模型導(dǎo)出為標(biāo)準(zhǔn)格式- OBJ, FBX, PLY, ABC, GLB, STL, 3MF, DXF, DAE
輸出等級(jí)細(xì)節(jié)模型和Cesium 3D視窗 - B3DM
報(bào)告系統(tǒng)-共享預(yù)先定義和定制的質(zhì)量報(bào)告
導(dǎo)出相機(jī)注冊(cè),紋理,鄰位投影,DSM/DTM等
測(cè)量、分類和檢查
自動(dòng)檢測(cè)編碼目標(biāo),場(chǎng)景縮放和地理參考
不同坐標(biāo)系之間的自動(dòng)轉(zhuǎn)換(EPSG數(shù)據(jù)庫(kù)實(shí)現(xiàn))
距離、面積和體積測(cè)量
稀疏點(diǎn)云檢測(cè)-相機(jī)關(guān)系和場(chǎng)景結(jié)構(gòu)的不確定性
密集點(diǎn)云AI分類
自動(dòng)化和集成
命令行處理和腳本編輯
使用RealityCapture命令在命令行外進(jìn)行批處理
發(fā)送命令行命令到已經(jīng)打開的RC實(shí)例(可以使用我們的高級(jí)編程語言來控制程序流程)
產(chǎn)品特點(diǎn):
三角網(wǎng)格模型自動(dòng)重建
高級(jí)著色和紋理算法
在一個(gè)項(xiàng)目中支持多個(gè)坐標(biāo)系(全世界坐標(biāo)系統(tǒng))
直接支持PPK/RTK飛行日志,在EXIF/XMP的GPS,和地面控制點(diǎn)
正交投影,DSM & DTM計(jì)算,AI分類工具并導(dǎo)入到公認(rèn)的標(biāo)準(zhǔn),比如tiff, geotiff
體積、面積和距離測(cè)量
3D導(dǎo)出為標(biāo)準(zhǔn)格式(ply, obj, xyz)
LOD輸出,直接上傳到Cesium ion
相機(jī)運(yùn)動(dòng)/校準(zhǔn)輸出世界標(biāo)準(zhǔn)(用自定義腳本)
激光掃描與照片的無縫組合
一套分析對(duì)齊質(zhì)量,精度,地理配準(zhǔn),網(wǎng)格重建,3D模型后處理(過濾、簡(jiǎn)化、平滑等)的工具
命令行處理
應(yīng)用范圍:
硬件要求和兼容性:
本地處理,沒有大小限制,不需要云
64位PC,至少8GB內(nèi)存
64位Microsoft Windows version7/8/8.1/10 or Windows Server version 2008+
NVIDIA顯卡,CUDA 2.0+能力和1GB內(nèi)存
我們建議使用至少4個(gè)CPU核,16G內(nèi)存和1024個(gè)CUDA核的機(jī)器。如果沒有NVIDIA卡,仍然可以運(yùn)行應(yīng)用程序和注冊(cè)圖像,只是不能創(chuàng)建紋理網(wǎng)格。
責(zé)任編輯:haq
-
軟件
+關(guān)注
關(guān)注
69文章
5124瀏覽量
88973 -
三維
+關(guān)注
關(guān)注
1文章
517瀏覽量
29365 -
建模
+關(guān)注
關(guān)注
1文章
316瀏覽量
61463
發(fā)布評(píng)論請(qǐng)先 登錄
VirtualLab:光學(xué)系統(tǒng)的三維可視化
三維測(cè)量軟件的使用技巧
三維掃描與建模的區(qū)別 三維掃描在工業(yè)中的應(yīng)用
數(shù)字孿生三維可視化場(chǎng)景如何搭建?
什么是三維點(diǎn)云分割
詳細(xì)介紹三維建模的優(yōu)勢(shì)和未來發(fā)展方向
友思特方案 基于三維點(diǎn)云實(shí)現(xiàn)PCB裝配螺絲視覺檢測(cè)

三維可視化建筑建模特點(diǎn)
泰來三維 三維激光掃描結(jié)合BIM在工廠掃描建模中的優(yōu)勢(shì)
起點(diǎn),經(jīng)過點(diǎn),終點(diǎn),三點(diǎn)xyz,畫三維圓弧。
cad如何進(jìn)行三維建模
泰來三維 三維掃描古建筑-蘇巴什佛寺遺址數(shù)字化保護(hù)
SolidWorks軟件 強(qiáng)大的三維設(shè)計(jì)軟件
友思特案例 | 自研創(chuàng)新!三維工件尺寸測(cè)量及點(diǎn)云處理解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論