 基于光纖陀螺儀實現慣性測量系統的應用方案
基于光纖陀螺儀實現慣性測量系統的應用方案

1.引言
軌道不平順檢測方法有絕對測量與相對測量兩大類,目前應用廣泛的是相對測量法。相對測量又分弦測法、慣性基準法、慣性元件測量法等不同方法。其中弦測法、慣性基準法使用較多。由于慣性測量元件成本高昂、體積龐大等原因,慣性元件測量法一般只局限在大型軌檢車上應用。
隨著慣性元件成本的不斷降低及其日漸小型化,該測量方法在小型軌檢小車上的應用正逐步成為可能。其中,光纖陀螺儀作為一種高精度慣性測量元件,以前主要應用于軍事、航空等重要領域,現已廣泛應用于民用工業。
本文詳細描述了一種由VG951、AD7714、P89V51RD等組成的軌檢小車用軌道方向不平順慣性測量系統及相關算法。該慣性測量系統也可用于軌道高低不平順的測量。
2.系統要求與技術關鍵
慣性法測量軌向、高低不平順時,實質上是按位置測量軌道水平方向的擺角或垂直方向的俯仰角。
采用陀螺儀檢測軌向時,由于軌道在一定長度上的水平擺角不可能很大,軌檢小車的推行速度又很低,陀螺儀所感受的角速度的值是很小的,其輸出信號很微弱,很容易被噪聲淹沒。因此,本系統設計時,必須從噪聲背景中提取出微弱的角速度信號,并通過積分方法實現角度信號的輸出。
陀螺儀零位漂移是影響本系統性能的另一個關鍵性問題,也是陀螺儀選型時必須認真考慮的首要因素。
3.系統設計
VG951光纖陀螺儀是根據薩格納克效應研制的,即光在薩格納克效應中產生的光程差與旋轉角速度成正比,從而可通過光的干涉結果推算角速度,其輸出信號與角速度成正比。其主要關鍵技術指標為:偏差穩定性:0.3 - 1deg/hr;隨機游走:<0.002deg/sqrtHz;工作范圍:80deg/sec;
偏差重復性(offset) 1°/hr,1 sigma;偏差變化(恒穩態)0.3°/hr,1 sigma;比例因子37mV/°/s±10%;外部磁場<1°/hr/Gauss;輸出阻抗1000Ω。由此可以看出,VG951是一種穩定性好、漂移小、重復性好、抗磁能力強的性能優異的光纖陀螺儀產品。
陀螺儀用于檢測軌向時輸出信號很微弱,因此,必須選用低噪聲運放電路,并合理設置濾波電路。本系統選用高精度低噪聲的儀用放大器AD620,其最佳源電阻在1000Ω左右,正好與VG951相匹配,能最大限度地減少由于電路阻抗不匹配產生的噪聲 。該放大電路與無源 RC濾波電路組合,能夠有效保證前置放大電路的品質。
AD 公司的A/D轉換器AD7714是一款帶信號處理功能的串行A/D,可直接從傳感器接受低電平信號,使用和差轉換技術實現高達24bit的無誤碼模數轉換。AD7714內置數字濾波功能,可編程設置濾波器的截止頻率和穩定時間。本系統可同時接受和處理二路VG951的輸入。 AD7714參考端電壓(+3.0V)由AD780提供。
陀螺儀信號是雙極性信號,且信號地與電源地相通。雖然AD7714可以接受雙極性輸入,但有一個限制條件,即信號相對于AGND的電壓不能低于-30mv。因此,必須將陀螺儀信號平移一個基準電壓(+1.5V),該電壓由AD780分壓提供。
系統以Philips公司的P89V51RD2為控制與數據處理中心。P89V51RD2是一種高性能的80C51兼容型單片機,片內內置64K程序存儲器,768+256Byte數據存儲器,可利用 Philips提供的ISP/IAP程序實現系統的在線編程(在系統或在應用編程)。該CPU管理并控制著數據采集過程,由T2 定時器給AD7714的數字積分提供精確定時,并完成陀螺儀測量數據的實時分析與處理工作。圖1為簡化硬件原理圖。
同時,P89V51RD2還是與軌檢小車主CPU進行數據通訊的控制器,成為軌檢小車多CPU主從結構的一個基礎端點。
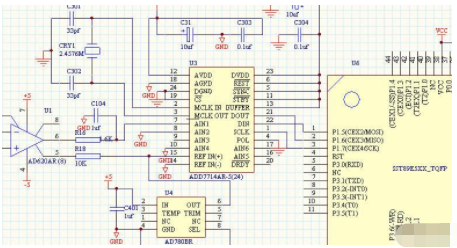
圖1 簡化硬件原理圖
4.零點漸變算法
受陀螺儀零飄以及AD7714 AIN端信號偏置、基準電壓和參考電壓穩定性等因素的影響,AD7714輸出信號的零點(陀螺儀角速度為零時輸出信號)呈現出一定程度的波動。如果采用一次平均法計算零點,則隨著時間變化實際零點漂移會很大,既實際零點與一次平均法所求的零點之差會變得很大,這樣僅僅零點之差求和(既積分)就會產生不容忽視漂移。圖2系列3曲線為一次平均法(求取零點)所產生的零點積分漂移曲線。
零點漸變算法的基本思路是:用多次平均法代替一次平均法求取零點。首先在陀螺儀靜止不動(角速度為零)時,采集八個數據(實際零點)作為樣本,這些樣本叫做零點樣本,求它們的均值,并稱該值為基準零點,第一個基準零點叫初始基準零點,然后每采集八個零點樣本求得一個新的基準零點。當陀螺儀運動(角速度不為零)時,零點樣本由上次所求的基準零點代替,這樣不管陀螺儀狀態如何,每采集八個數據都可獲得八個零點樣本,既獲得一個基準零點,由于實際零點與基準零點隨時間幾乎同時變化,所以它們之差不會隨時間變化而變得很大,這樣零點之差求和(既積分)產生的漂移將大大減少,零點漂移積分效果見圖2系列3曲線。由上所述,求取零點樣本為關鍵所在,下面是判斷零點(陀螺儀角速度為零)依據。
由于陀螺儀VG951最小可分辨的角速度為0.002o/s,其比例因子為37mv/(o/s),換算成電壓為37*0.002=74μV,用十六進制數據表示為74/(3*1000000)/*224=19D,AD采集的數據用3字節數據表示:XX XX XX,顯然陀螺儀信號只能精確到16位。所以信號采集的精度在16位以上就可以。如果采集的信號與(初始)基準零點相減,其差值在100以下,可以認為這時陀螺儀角速度為零,信號可作為零點樣本。若差值大于100則認為是非零信號(陀螺
儀角速度不為零),該點零點樣本由上次所求的(初始)基準零點代替。
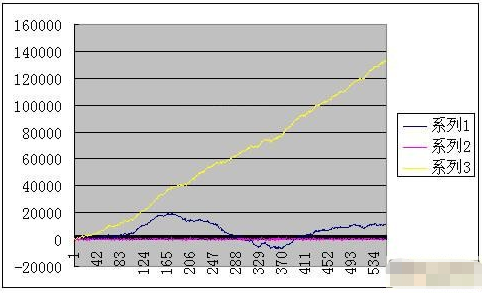
圖2 陀螺儀靜止不動時零點積分漂移曲線
5.實驗效果
軌道方向(陀螺儀轉過的角度)是通過實際采集的信號與上次所求的(初始)基準零點之差求和實現。實驗輸出曲線見圖 3其中橫坐標為秒,縱坐標為角度量(未標定位為實際角度),由圖3可知在1小時內角度漂移沒超過400000,化為實際角度為:400000/16/224*3/0.037=0.06o,漂移非常小。突變曲線是陀螺儀緩慢運動時輸出的,反應非常靈敏。
圖3 陀螺儀輸出軌向圖
6.結束語
本文作者創新點:該系統采用精密的光纖陀螺儀作為小型軌檢車測量方向不平順的傳感器,這是一種新的嘗試,并在實踐中逐步形成了零點漸變算法,此算法是系統成敗的關鍵。帶有數字濾波功能的24位A/D AD7714的應用提高了抗干擾能力及測量精度,零點漸變算法、積分功能使得所求角度漂移小精度高,而P89V51RD2提供了更大的數據存儲空間,其ISP/IAP功能利于對系統程序的修改或升級。
責任編輯:gt
-
光纖
+關注
關注
20文章
4163瀏覽量
75472 -
陀螺儀
+關注
關注
44文章
852瀏覽量
100159 -
測量系統
+關注
關注
2文章
559瀏覽量
42398
發布評論請先 登錄
MEMS陀螺儀系統的精確導航
陀螺儀的特性圖解及應用
3DM-GX3-25陀螺儀及慣性測量系統
3dm-gx5-25_微慣性航姿系統
基于ARM 的陀螺儀測控系統的設計與實現
基于ARM的陀螺儀測控系統的設計與實現

MEMS陀螺儀可否取代光纖陀螺儀技術






 工商網監
工商網監
評論