") K線診斷協(xié)議驅(qū)動器的工作原理及如何實(shí)現(xiàn)設(shè)計(jì)
K線診斷協(xié)議驅(qū)動器的工作原理及如何實(shí)現(xiàn)設(shè)計(jì)

作者:王振華;余格非;張學(xué)平 來源:電子產(chǎn)品世界
引言:
隨著汽車電子控制單元功能的增加及升級換代的需要,診斷功能已經(jīng)成為ECU不可或缺的重要組成部分,因此,深入研究診斷協(xié)議及其實(shí)現(xiàn)非常必要。基于K線的ISO14230和基于CAN總線的ISO15765是業(yè)內(nèi)廣泛采用的兩種診斷標(biāo)準(zhǔn),K線是ISO9141定義的診斷通信總線,ISO14230在ISO9141的基礎(chǔ)上將K線電壓擴(kuò)展到24V,并擴(kuò)展了診斷服務(wù)。相比較于CAN總線,K線診斷既能滿足要求,又能節(jié)約成本,在國產(chǎn)車上得到大規(guī)模應(yīng)用。不同于CAN總線有專門的協(xié)議驅(qū)動器,用戶直接進(jìn)行應(yīng)用程序的編寫而不用管理底層的通信,K線沒有專門的協(xié)議驅(qū)動器,一般要在SCI模塊的基礎(chǔ)上用軟件實(shí)現(xiàn)其底層通信管理,筆者為某國產(chǎn)車設(shè)計(jì)了一款帶K線診斷功能的車身控制模塊,結(jié)合ISO14230規(guī)范,首先分析K線診斷協(xié)議驅(qū)動器的功能,然后介紹協(xié)議驅(qū)動器的關(guān)鍵設(shè)計(jì)技術(shù),最后用CANoe進(jìn)行測試。
1 協(xié)議驅(qū)動器功能
ISO14230-1定義了K線物理層協(xié)議,ISO14230-2定義了數(shù)據(jù)鏈路層協(xié)議,ISO14230-3定義了應(yīng)用層協(xié)議,其與OSI模型對應(yīng)關(guān)系如表1所示。
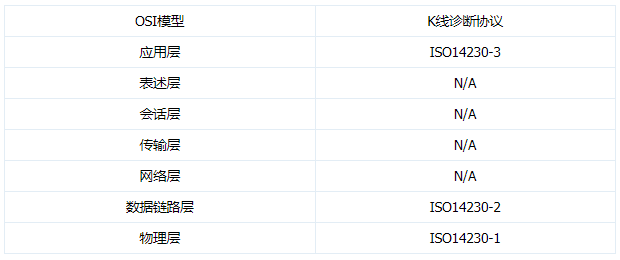
表1 ISO14230與OSI模型的對應(yīng)關(guān)系
物理層定義了邏輯位與物理電平的對應(yīng)關(guān)系,同時定義了信號位的上升時間和下降時間,數(shù)據(jù)鏈路層協(xié)議定義了K線數(shù)據(jù)格式、診斷報(bào)文格式、定時參數(shù)及通信錯誤判定及處理機(jī)制,應(yīng)用層協(xié)議定義了基于請求/響應(yīng)的診斷過程及各項(xiàng)診斷服務(wù)。做為待診斷ECU節(jié)點(diǎn),K線協(xié)議驅(qū)動器實(shí)現(xiàn)的主要功能包括:
1、診斷報(bào)文的封裝和發(fā)送、接收和解析,根據(jù)報(bào)文格式填充/提取SID和數(shù)據(jù);
2、通過初始化過程建立與診斷儀之間的診斷通信;
3、保持正確的幀間定時、字節(jié)間定時,檢測診斷儀報(bào)文的定時錯誤及其它通信錯誤;
4、根據(jù)診斷儀的診斷請求和ECU當(dāng)前狀態(tài)返回相應(yīng)的診斷響應(yīng),管理診斷會話;
下面結(jié)合數(shù)據(jù)鏈路層的協(xié)議分析及其數(shù)據(jù)結(jié)構(gòu)、驅(qū)動程序的設(shè)計(jì)介紹下K線診斷協(xié)議驅(qū)動器的原理及實(shí)現(xiàn)。
2 協(xié)議驅(qū)動器設(shè)計(jì)
K線基于異步串行通信接口,在底層傳輸上采用8N1格式的SCI串行數(shù)據(jù)鏈路格式:8個數(shù)據(jù)位+1個停止位、無奇偶校驗(yàn),由于K線在物理層上是單根線,在發(fā)送時也會觸發(fā)接收中斷,所以K線報(bào)文的發(fā)送和接收解析統(tǒng)一在SCI接收中斷處理函數(shù)中以狀態(tài)機(jī)的形式實(shí)現(xiàn)【3】。下面從報(bào)文收發(fā)及解析、初始化、定時管理三個方面介紹下數(shù)據(jù)鏈路層的實(shí)現(xiàn)。
2.1 報(bào)文收發(fā)及解析
K線診斷報(bào)文結(jié)構(gòu)如表2所示:
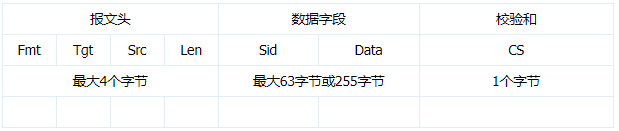
表2 K線診斷報(bào)文結(jié)構(gòu)
K線報(bào)文由報(bào)文頭、數(shù)據(jù)字段及校驗(yàn)和組成。報(bào)文頭包含格式字節(jié)Fmt、目標(biāo)地址Tgt、源地址Src和可選附加長度信息Len,F(xiàn)mt指定目標(biāo)地址的形式(物理地址/功能地址),當(dāng)報(bào)文頭中不包含可選Len字段時指定數(shù)據(jù)字段的長度;數(shù)據(jù)字段包括服務(wù)標(biāo)識符Sid和數(shù)據(jù)Data,其長度由Fmt和Len決定;CS為單字節(jié)校驗(yàn)和。設(shè)計(jì)報(bào)文結(jié)構(gòu)體如下:
typedef struct
{
k_state state;
uchar fmt;
uchar tgt_addr;
uchar src_addr;
uchar datalen;
uchar sid;
uchar *data;
uchar checksum;
uchar msgdatalen;
uchar done;
}k_msg;
typedef enum{
k_FMT=0,
k_TGTADDR,
k_SRCADDR,
k_DATALEN,
k_SID,
k_DATA,
k_CS
}k_state;
成員變量state表示當(dāng)前K線通信數(shù)據(jù)是報(bào)文中的哪個組成部分,msgdatalen用于數(shù)據(jù)字段字節(jié)數(shù)的統(tǒng)計(jì),done表示該報(bào)文是否發(fā)送或接收完成,其它成員變量與報(bào)文結(jié)構(gòu)組成部分一一對應(yīng)。
void k_ifc_rx(void)
{
k_u8 ch,SciSr1;
SciSr1=Kline_periph[SCISR1];
ch=Kline_periph[SCIDRL];
switch(k_curmsg.state){
case k_FMT:
if(k_REP==k_drvhandle.mode){
if(ch==k_curmsg.fmt){
k_curmsg.state=k_TGTADDR;
k_SendChar(k_curmsg.tgt_addr);
}
}else{
k_curmsg.state=k_TGTADDR;
k_curmsg.fmt=ch;
}
break;
case k_TGTADDR:
。..
break;
case k_SRCADDR:
。..
break;
case k_DATALEN:
if(k_REP==k_drvhandle.mode){
if(ch==k_curmsg.datalen){
k_curmsg.msgdatalen=0;
k_curmsg.state=k_SID;
k_SendChar(k_curmsg.sid);
}
}else{
k_curmsg.msgdatalen=0;
k_curmsg.datalen=ch;
free(k_curmsg.data);
k_curmsg.data=malloc(k_curmsg.datalen);
k_curmsg.state=k_SID;
}
break;
case k_SID:
if(k_REP==k_drvhandle.mode){
if(ch==k_curmsg.sid){
k_curmsg.msgdatalen++;
if(k_curmsg.msgdatalen==k_curmsg.datalen){
k_curmsg.state=k_CS;
k_SendChar(k_curmsg.checksu);
}else{
k_curmsg.state=k_DATA;
k_SendChar(k_curmsg.data[0]);
}
}
}else{
k_curmsg.sid=ch;
k_curmsg.msgdatalen++;
if(k_curmsg.datalen==k_curmsg.msgdatalen){
k_curmsg.state=k_CS;
}else{
k_curmsg.state=k_DATA;
}
}
break;
case k_DATA:
。..
break;
case k_CS:
k_curmsg.state=k_FMT;
if(k_REP==k_drvhandle.mode){
if(ch==k_curmsg.checksum){
k_curmsg.done=1;
}
}else{
k_curmsg.checksum=ch;
k_curmsg.done=1;
}
break;
} if((k_REQ==k_drvhandle.mode)&&(k_FMT!=k_curmsg.state)){
TimerStart(k_REP_P4MS,k_TP4,0,1);
}
}
2.2 初始化
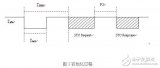
在開始診斷服務(wù)之前,診斷儀必須對ECU進(jìn)行初始化,通過ECU的響應(yīng)獲取ECU支持的報(bào)文頭格式和定時參數(shù),建立診斷通訊【4】。初始化過程如圖1所示,診斷儀發(fā)送一個25ms ’0’、25ms’1’的WuP(WakeUp Pattern),然后發(fā)送STC(StartCommunication) Request,ECU檢測出WuP并接收到正確的STC Request后返回STC Response,該報(bào)文的Data字段為由兩個字節(jié)構(gòu)成的“關(guān)鍵字(Key Word)”,指定了ECU所支持的報(bào)文頭和定時參數(shù)信息,如Key Word指定為0x8fea即表示在報(bào)文頭中采用附加長度信息Len表示數(shù)據(jù)字段長度,同時采用默認(rèn)的定時參數(shù)。
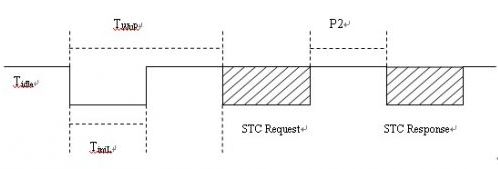
圖1 初始化過程
初始化之前K線處于空閑狀態(tài),ECU禁止SCI功能并使能SCI的RXD引腳為IO模式,檢測到下降沿時通過定時器統(tǒng)計(jì)RXD引腳的IO低電平的持續(xù)時間,檢測到上升沿時開始統(tǒng)計(jì)RXD引腳的IO高電平持續(xù)時間,判斷是否為有效的WuP;也可以設(shè)置SCI的波特率為200bps,判斷是否能接收到數(shù)據(jù)0xf0(0xf0在總線上表現(xiàn)為5個0,5個1),檢測出正確的WuP后,使能SCI功能,設(shè)置波特率為10400bps,等待診斷儀發(fā)送的STC Request,接收到請求后返回STC Response肯定響應(yīng),建立診斷通訊。
2.3 定時管理
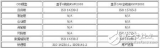
ISO14230定義了4個定時參數(shù)管理字節(jié)間定時和報(bào)文間定時,診斷儀和ECU需要共同遵守這些定時約束以保證正常的診斷通訊,表2給出了這4個定時參數(shù)的含義及取值區(qū)間。
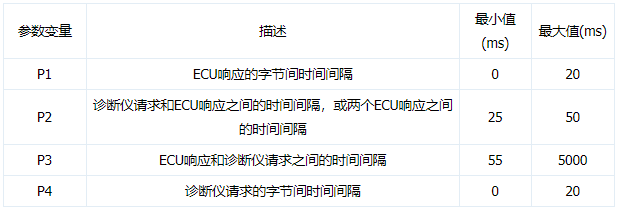
表2 定時參數(shù)
P1和P4是報(bào)文內(nèi)字節(jié)間定時,P2和P3為報(bào)文間定時。診斷儀在初始化完成后或接收到診斷響應(yīng)后需要在P3時間內(nèi)發(fā)送診斷請求,否則ECU端退出診斷會話,斷開診斷通訊,K線協(xié)議驅(qū)動器重啟,等待診斷儀發(fā)出下一個WuP和STC Request。ECU在接收到診斷請求后,需要在P2時間內(nèi)返回診斷響應(yīng), P2由ECU控制,通常采用25ms的固定值,當(dāng)診斷請求報(bào)文中的Fmt字段指定目標(biāo)地址為“功能地址”時,P2的取值需要用一個隨機(jī)數(shù)發(fā)生器來產(chǎn)生,因?yàn)閷τ诠δ軐ぶ返脑\斷儀請求來說,可能多個ECU都會返回響應(yīng),如果采用固定的P2參數(shù)的話,可能會因?yàn)槎鄠€ECU競爭總線而出現(xiàn)總線沖突問題,P2采用隨機(jī)數(shù),ECU不會在同一時間返回響應(yīng),從而避免了總線競爭問題。
3 協(xié)議驅(qū)動器測試
協(xié)議驅(qū)動器在Vector公司的CANoe軟硬件平臺上進(jìn)行測試,進(jìn)行基于K線的KWP2000服務(wù)測試時,將KWP2000.dll和KLineCPL.dll模塊加入CANoe仿真環(huán)境,CANoe模擬診斷儀節(jié)點(diǎn),并使用一個代理節(jié)點(diǎn)來實(shí)現(xiàn)CAN網(wǎng)絡(luò)和K線之間的報(bào)文轉(zhuǎn)發(fā),此時CANoe使用計(jì)算機(jī)的串口,并通過串口/K線轉(zhuǎn)換器與ECU相連,診斷實(shí)現(xiàn)框架如圖2所示。
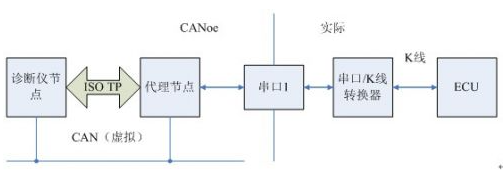
圖2 K線診斷框架
與CAN總線診斷不同的是,K線診斷需要診斷儀通過初始化過程和ECU建立診斷通訊,診斷通訊的建立如圖3所示。建立診斷通訊后便可以像CAN診斷一樣進(jìn)行診斷服務(wù)了,這方面論文很多,在此不再贅述。
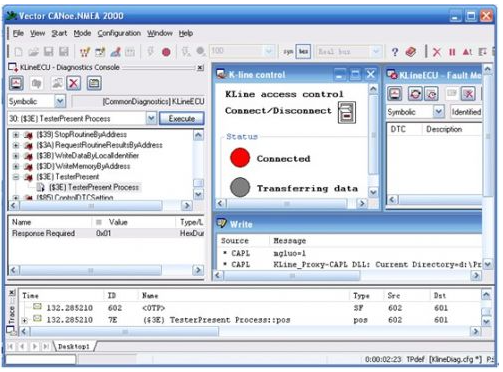
圖3 建立診斷通訊
結(jié)語
本文實(shí)現(xiàn)的K線協(xié)議驅(qū)動器模塊經(jīng)過嚴(yán)格測試, 能夠高效完成K線診斷,性能和穩(wěn)定性達(dá)到預(yù)期設(shè)計(jì)要求。驅(qū)動器獨(dú)立于處理器和操作系統(tǒng),具有良好的通用性和靈活性,可以方便得集成到應(yīng)用程序中,具有很高的實(shí)用價值和借鑒意義。
責(zé)任編輯:gt
-
驅(qū)動器
+關(guān)注
關(guān)注
54文章
8655瀏覽量
149557 -
汽車電子
+關(guān)注
關(guān)注
3037文章
8299瀏覽量
169909 -
應(yīng)用程序
+關(guān)注
關(guān)注
38文章
3331瀏覽量
58898
發(fā)布評論請先 登錄
伺服驅(qū)動器的工作原理及伺服驅(qū)動器常見接線方法
伺服驅(qū)動器的工作原理是什么
了解伺服驅(qū)動器的工作原理
基于K線診斷協(xié)議的驅(qū)動器設(shè)計(jì)指南
基于K線/CAN總線的KWP2000協(xié)議分析
伺服驅(qū)動器的工作原理
什么是伺服驅(qū)動器?伺服驅(qū)動器的工作原理和應(yīng)用領(lǐng)域
驅(qū)動器的工作原理
步進(jìn)電機(jī)驅(qū)動器工作原理及調(diào)速方法
半橋驅(qū)動器的工作原理和應(yīng)用
線路驅(qū)動器工作原理_線路驅(qū)動器輸入差模電壓范圍
步進(jìn)驅(qū)動器工作原理知識你了解多少?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論