") UWB定位算法TDOA和TWR哪個更好,來做詳細對比
UWB定位算法TDOA和TWR哪個更好,來做詳細對比

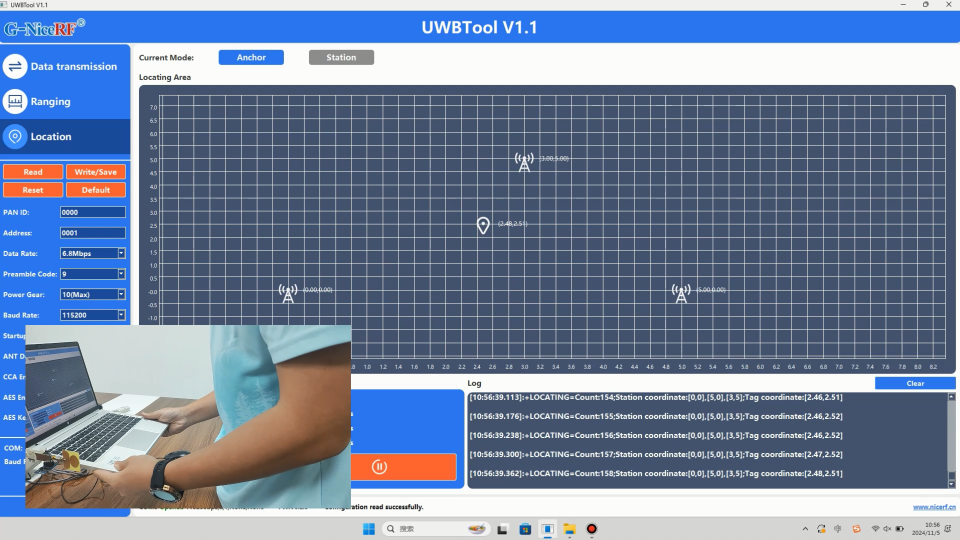
UWB定位是基于時間飛行的算法(飛行時間,TOF)。測量一個UWB定位標簽和多個UWB定位基站之間的光傳播時間。至少需要三個定位基站才能使用三邊法精確定位標簽的位置。UWB定位基站和定位標簽之間也必須保持直線和可視無遮擋。在UWB定位中,有兩種基本的定位算法:基于差分飛行時間(TDOA)和雙向測距(TWR)的UWB定位算法,這兩種定位算法各有優(yōu)劣,下面比較一下。
飛行時間差(TDOA)和雙向測距(TWR)定位算法區(qū)別如下:
(1)準確度,超寬帶(UWB)無線電技術使我們能夠在室內(nèi)和室外定位物體,精度一般在10厘米-30厘米之間。時差法和雙向測距法都能達到這一精度。由于時差法是由光速和時間差的乘積來計算的,因此雙向測距技術總體上更為精確。
(2)可伸縮性-UWB定位基站和定位標簽的數(shù)量,到達時差法TDOA要求定位標簽使用一個小的時間段發(fā)送一條脈沖消息。因此大量的定位標簽可以在幀速率內(nèi)傳輸信號,所以TDOA定位算法相對容納的定位標簽數(shù)量更多,UWB定位基站的數(shù)量相對也比較少。雙向測距在設備之間發(fā)送一系列消息,從而導致有限數(shù)量的定位標簽可以在刷新率內(nèi)傳輸信號,因此標簽數(shù)量相對較少。而定位基站分成主基站和從基站,一個主基站可以對應4個從基站,主基站負責和定位引擎進行通信,因此需要的基站數(shù)量總體比較多,部署比較麻煩。
(3)電池壽命,TDOA到達時差算法只需要脈沖信號來定位UWB定位標簽,從而將電池壽命延長到幾年。采用雙向TWR測距算法,UWB標簽必須多次發(fā)送和接收定位基站的信號。TWR需要交換9條消息來定位UWB定位標簽,這大大縮短了標簽的待機時間。
(4)魯棒性,到達時間差算法要求UWB定位基站的時間同步非常精確,這會對魯棒性產(chǎn)生負面影響。如前所述,TDOA定位算法的一個基本要求是保持定位基站的同步。雙向測距算法TWR不需要定位基站的同步,這增加了系統(tǒng)的魯棒性。
(5)可擴展性-面積大小,到達時差算法可以在不更改系統(tǒng)或設置的情況下向系統(tǒng)添加定位基站。雙向測距算法你要求系統(tǒng)中的所有從UWB定位基站與主UWB定位基站直接通信。從定位基站和主定位基站之間的通信區(qū)域限制了區(qū)域的大小。主定位基站都與定位服務器通信。
(6)易用性,在定位系統(tǒng)中增加基于TDOA的定位基站,需要測量定位基站的位置并標記分配定位基站ID,所以增加基站或者擴容相對簡單。對于TWR算法的系統(tǒng),添加額外的定位基站或標簽需要在服務器上進行修改系統(tǒng)算法,以便新定位基站和定位標簽之間能夠融入到原有的系統(tǒng)中進行通信。因此,相對比較麻煩些。
綜上所述,在目前的許多UWB定位系統(tǒng)中,TDOA和TWR兩種定位算法都有使用。用TWR雙向測距算法對UWB基站同步要求低,但是耗電相對較大;而采用TDOA定位算法的UWB標簽容量和耗電上都有優(yōu)勢,但是對基站的同步要求比較高,系統(tǒng)的健壯性相比TWR算法的系統(tǒng)稍弱。所以最合理的方法是根據(jù)室內(nèi)定位現(xiàn)場的情況而定,采用合理的UWB定位算法解決方案。
fqj
-
定位技術
+關注
關注
7文章
303瀏覽量
25967 -
UWB
+關注
關注
32文章
1185瀏覽量
62910
發(fā)布評論請先 登錄
UWB - TDOA方案定位技術
UWB單基站360°測距定位400米,二維測距定位解決方案
UWB 定位測距
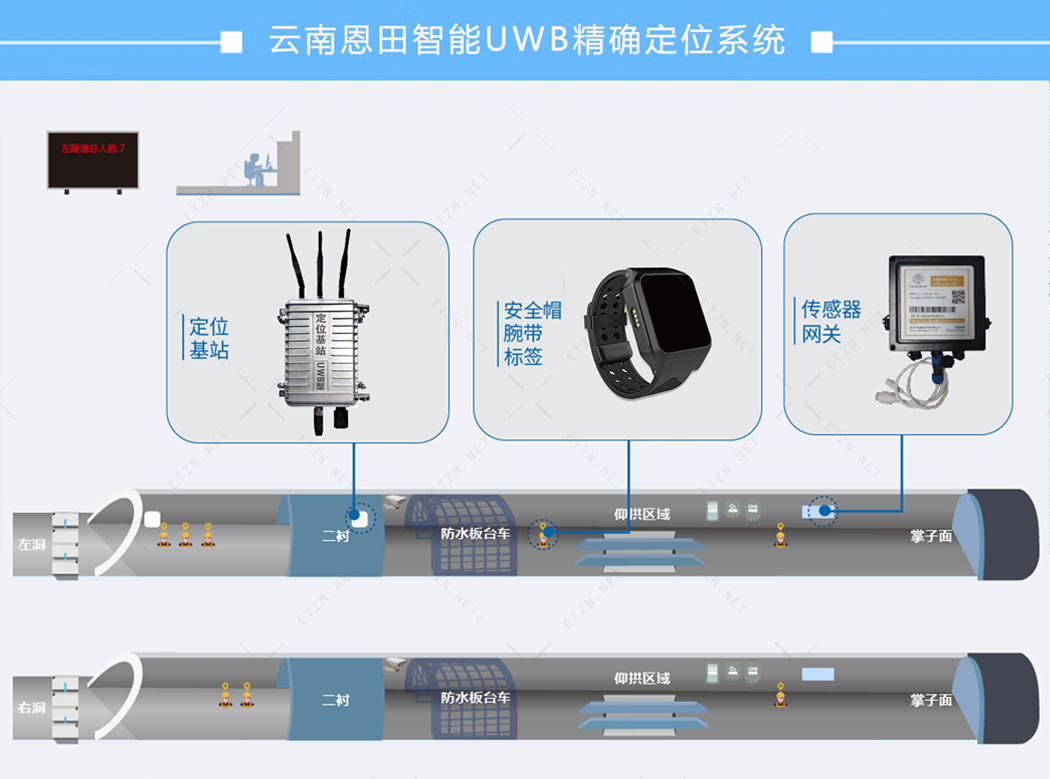
隧道UWB定位管理系統(tǒng)
精準到厘米!安信可UWB定位模組,讓室內(nèi)管理更“聰明”
基于 NXP NCJ29D5D UWB 定位算法方案

基于TurMass通信技術的高精度UWB定位系統(tǒng),精準定位,通信穩(wěn)定,多場景適用!#UWB定位
藍牙人員定位、UWB人員定位、RFID定位技術應該怎么選

如何應對UWB室內(nèi)定位信號被遮擋

UWB標簽與其他定位技術的比較
UWB技術如何實現(xiàn)不同維度的定位需求
云南恩田隧道 UWB 定位系統(tǒng)應用于隧道場景的高精度定位技術系統(tǒng)
UWB定位系統(tǒng)在智能制造中的應用實踐






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論