 基于三維激光數據的層級式SLAM方法
基于三維激光數據的層級式SLAM方法
近日,機器視覺頂刊IEEE Transactions on Pattern Analysis and Machine Intelligence(《模式分析與機器智能匯刊》IF=17.86)在線發表了遙感信息工程學院青年教師李加元(特聘副研究員)課題組研究成果,該研究實現了激光掃描視覺特征級點云高精度自動配準技術。
論文題為“A Practical O (N2) Outlier Removal Method for Correspondence-based Point Cloud Registration”(適用于特征級點云配準的實用粗差剔除方法)。研究工作針對特征級點云配準中高粗差比率問題(誤匹配率>95%),定義了匹配矩陣與擴展匹配矩陣概念,構建了非滿秩約束下行列式最小化代價函數模型,基于邊界理論實現了粗差匹配自動檢測,并提出了尺度自適應柯西穩健估計模型,實現了99%誤匹配率下點云數據高效高精度全自動配準拼接。
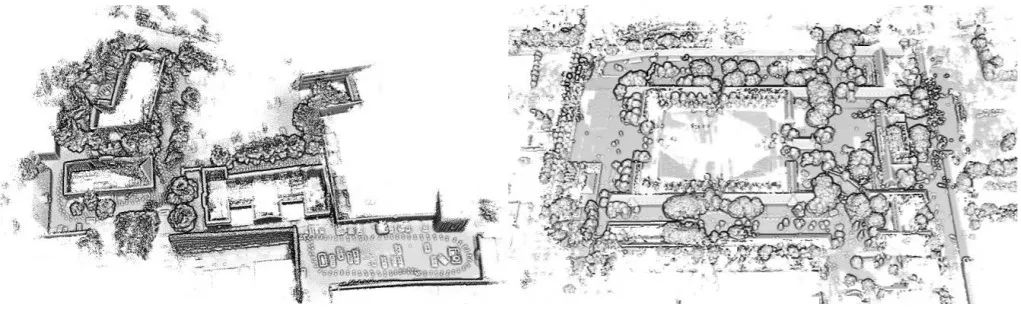
多站點云自動配準建圖效果
課題組已將該研究成果應用于智能駕駛即時定位與建圖(SLAM)任務中,提出了基于三維激光數據的層級式SLAM方法,實現了無GNSS環境下智能無人系統的高精度自主定位定姿,在智能駕駛國際著名公開數據集KITTI上排名全球第7(純激光SLAM算法中排名全球第4)。KITTI鏈接:
http://www.cvlibs.net/datasets/kitti/eval_odometry.php(名稱HMLO-whu)
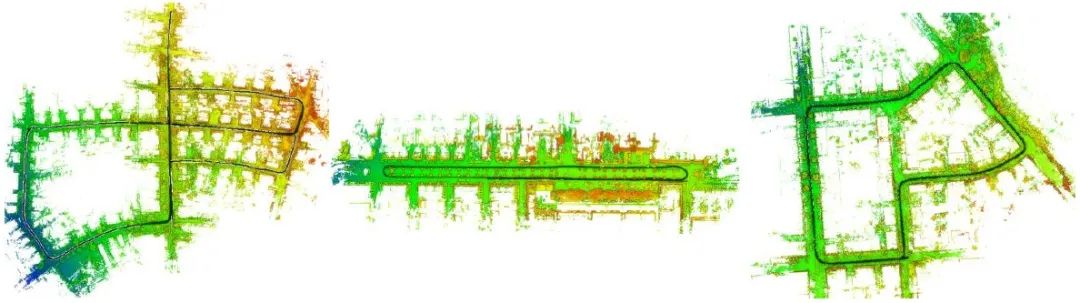
純激光定位與建圖效果
近年來,在國家自然科學基金、國家重點研發計劃、博士后創新人才計劃等項目的資助下,李加元博士致力于智能無人系統自主導航定位與建圖中的關鍵技術研究,取得了系列研究成果,在IEEE Transactions on Image Processing, ISPRS Journal of Photogrammetry and Remote Sensing, IEEE Transactions on Geoscience and Remote Sensing,《測繪學報》等計算機視覺、圖像處理、攝影測量與遙感領域的知名期刊發表論文將近30篇,曾獲美國攝影測量與遙感學會學術金獎。研究工作攻克了大幾何與大輻射畸變影像匹配、高粗差比率穩健估計、高可靠性特征級激光點云自動配準等一系列技術壁壘,形成了視覺與激光SLAM理論和方法,完成了智能無人系統高精度自主定位導航的若干關鍵技術積累。
責任編輯:lq
-
自動檢測
+關注
關注
0文章
119瀏覽量
15930 -
SLAM
+關注
關注
24文章
436瀏覽量
32358 -
激光視覺
+關注
關注
0文章
8瀏覽量
6093
原文標題:武漢大學在激光視覺導航領域取得新進展
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
三維高斯潑濺大規模視覺SLAM系統解析

一文看懂SRI系列三維激光輪廓測量儀硬件安裝教程

三維測量數據處理流程
三維激光測量系統的優勢
常見的三維測量方法和工具
三維掃描與建模的區別 三維掃描在工業中的應用
三維激光掃描儀的數據可視化技術
三維激光掃描儀在工程測量中的優勢
三維激光掃描儀與無人機結合的應用
三維激光掃描儀使用技巧 三維激光掃描儀測量精度分析
三維激光掃描儀應用領域 三維激光掃描儀與傳統測量工具比較
蔡司激光三維掃描儀有效掃描金屬材料

泰來三維 三維激光掃描結合BIM在工廠掃描建模中的優勢
泰來三維|三維激光掃描技術在古建筑保護中的應用






 工商網監
工商網監
評論