") 微美全息提出的一種用于全息AR系統(tǒng)的頭戴顯示器
微美全息提出的一種用于全息AR系統(tǒng)的頭戴顯示器
微美全息軟件有限公司(納斯達(dá)克:WiMi)(以下簡稱為“微美全息”或“公司”),一家領(lǐng)先的全息AR應(yīng)用技術(shù)提供商,獲得用于全息AR系統(tǒng)的頭戴顯示器的專利。本專利為公司自主研發(fā)的成果,有利于公司進(jìn)一步完善知識產(chǎn)權(quán)保護(hù)體系,保持技術(shù)領(lǐng)先地位,提升公司的核心競爭力。
本專利提出的一種用于全息AR系統(tǒng)的頭戴顯示器,實現(xiàn)全息應(yīng)用所需的沉浸感,而且能夠?qū)㈩^部動作數(shù)據(jù)以及外界圖像信息發(fā)送給上位機(jī)。包括全息數(shù)據(jù)采集傳輸模塊和微顯示器模塊,全息數(shù)據(jù)采集傳輸模塊包括圖像傳感器、陀螺儀、加速度計、藍(lán)牙模塊和處理器,全息數(shù)據(jù)采集傳輸模塊完成對頭部運動數(shù)據(jù)的采集、對真實場景的全息圖像信息采集,并將采集到的全息數(shù)據(jù)傳送給微顯示器模塊作進(jìn)一步的數(shù)據(jù)處理。微顯示器模塊包括微控制模塊,作為系統(tǒng)的全息AR數(shù)據(jù)輸出。
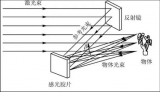
本專利采用全息出瞳擴(kuò)展器將全息出瞳進(jìn)行有效的二維擴(kuò)展,在滿足人眼目視要求的同時提升系統(tǒng)性能并且實現(xiàn)便攜化。本專利通過視網(wǎng)膜掃描顯示器(RSD)和半透膜陣列平板波導(dǎo)的全息出瞳擴(kuò)展算法技術(shù),測算全息出瞳擴(kuò)展的物理規(guī)律,得到了擴(kuò)展全息出瞳的有效動態(tài)算法。從光學(xué)系統(tǒng)設(shè)計的角度測算出限制全息出瞳的物理機(jī)制。采用衍射積分變換的處理方法對衍射光柵全息出瞳擴(kuò)展器和微透鏡陣列全息出瞳擴(kuò)展器進(jìn)行算法處理,為全息出瞳擴(kuò)展器的運動提供數(shù)據(jù)支持。通過運用光學(xué)仿真手段算法建模,動態(tài)運算六邊形排布單透鏡陣列和雙透鏡陣列的全息出瞳擴(kuò)展軌跡,結(jié)合雙透鏡陣列實現(xiàn)彩色顯示RSD全息出瞳擴(kuò)展的準(zhǔn)確算法,最終實現(xiàn)沉浸式高清全息AR數(shù)據(jù)成像。
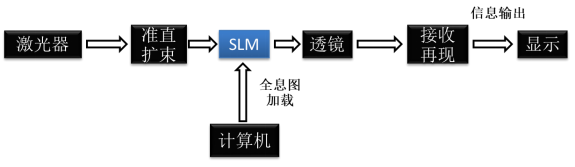
本專利利用頭戴顯示光學(xué)系統(tǒng)將由計算機(jī)生成,全息AR圖像源輸出的數(shù)字化并且全息成像于使用者視野中,并以此來實現(xiàn)對特定環(huán)境進(jìn)行重現(xiàn)的模擬仿真技術(shù)。本專利沉浸式頭戴AR顯示技術(shù)具有大視場、低功耗、可穿戴、模塊化、立體顯示、自定義程度高等優(yōu)點,未來會在遠(yuǎn)程醫(yī)療、工業(yè)施工、環(huán)境模擬、交通指示、虛擬教育、全息通訊、3D打印、輔助駕駛等方面應(yīng)用廣泛。
關(guān)于微美全息
微美全息成立于2015年,納斯達(dá)克股票代碼:WiMi。微美全息專注于全息云服務(wù),主要聚集在車載AR全息HUD、3D全息脈沖LiDAR、頭戴光場全息設(shè)備、全息半導(dǎo)體、全息云軟件、全息汽車導(dǎo)航等專業(yè)領(lǐng)域,覆蓋從全息車載AR技術(shù)、3D全息脈沖LiDAR技術(shù)、全息視覺半導(dǎo)體技術(shù)、全息軟件開發(fā)、全息AR廣告技術(shù)、全息AR娛樂技術(shù)、全息ARSDK支付、互動全息通訊等全息AR技術(shù)的多個環(huán)節(jié),是一家全息云綜合技術(shù)方案提供商。
責(zé)任編輯:lq
-
Ar
+關(guān)注
關(guān)注
24文章
5108瀏覽量
170167 -
數(shù)據(jù)采集
+關(guān)注
關(guān)注
39文章
6253瀏覽量
114046 -
頭戴顯示器
+關(guān)注
關(guān)注
0文章
12瀏覽量
8874
原文標(biāo)題:微美全息宣布獲得全息AR頭戴顯示器的專利
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
英偉達(dá)公布AR眼鏡新專利:無背光數(shù)字全息AR技術(shù)亮相
集團(tuán)資訊 | 蔡司全息顯示技術(shù),升級乘客出行體驗

光學(xué)全息術(shù)的原理及應(yīng)用領(lǐng)域
LED全息屏的特點及應(yīng)用
你知道LED全息隱形屏是什么嗎?
全息投影呈現(xiàn)什么影像特征
全息投影運用了什么原理和技術(shù)
全息投影技術(shù)的原理是什么
全息投影空中成像原理是什么
增強(qiáng)現(xiàn)實ar和全息投影的區(qū)別
全息投影與vr的區(qū)別是什么
激光全息無損檢測技術(shù)原理以及應(yīng)用
無監(jiān)督深度學(xué)習(xí)實現(xiàn)單次非相干全息3D成像
計算全息再現(xiàn)質(zhì)量提升技術(shù)的研究





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論