 關于4D Radar 天線布局的一些思考
關于4D Radar 天線布局的一些思考

談談我對4D Radar 天線布局的思考,對應上一篇(如何做好一款4D 高分辨毫米波雷達)中所述RSP所包含方面的Antenna Array Design (Azimuth/Elevation)(ULA/NLA/MRA) 部分。
我們暫不討論天線本身的設計與優化,包括天線方向圖,極化方式等等。我們更關注于滿足4D Radar功能及應用需求下的天線布局設計, 以下討論是針對自動泊車等應用的短距高分辨4D雷達天線布局設計。而對于中距或者長距雷達及對應的應用在這暫不討論。
對上述標注句子提取關鍵字,分別是自動泊車,高分辨,4D,分別對應天線布局設計的技術要求。具體說來,自動泊車應用要求較大FoV,高分辨意味著大天線孔徑,4D意味著具備方位及俯仰目標辨別能力。在這幾點基礎上還要求測角無模糊以及測角魯棒性高(抗干擾能力強)。總結一下:
FoV(》150度)
Azimuth Resolution(《2度)
Unambiguous Azi & Ele
measurement capability
Robust measurement
High measurement accuracy
上面幾點有些是互相矛盾的,提高某一指標的同時可能要犧牲另一個指標,所以設計某一滿足條件的天線布局往往是各變量綜合博弈與妥協的過程,并且一定要與具體應用,DoA算法結合起來,更要與工藝制造,硬件設計(緊湊設計),生產成本結合起來,所以沒有一款能夠一招鮮,吃遍天的布局設計,往往沒有最好,只有最匹配與最合適。
這篇文章首先從俯仰測角如何影響天線布局給出一些思考,其他影響因素及綜合分析會在以后的公眾號文章中陸續更新。
一般傳統MIMO automotive radar 方位角求解基于波束賦形(3D FFT),那么很自然的聯想,如果要加入俯仰分辨能力,能不能也基于波束賦形(4D FFT),帶來的結果是所述布局必須是一個面陣,如圖1所示是其中一種設計。

圖1 面陣設計
圖1中上圖是原始物理布局,下圖是MIMO虛擬陣列布局,對照之前所述指標,這樣的布局往往滿足你對4D Radar天線的所有想象,但是卻不適合車載雷達工程應用,原因可以自己思考。所以從滿足方位及俯仰探測角度講,我們往往尋求圖1面陣的低配版。需要指出的是,從系統需求角度,我們對方位角的重視程度要遠大于俯仰角,所以對于俯仰測角我們希望采用更具性價比的方式。Bosch GmbH發表的論文給出了如圖2 的參考設計。
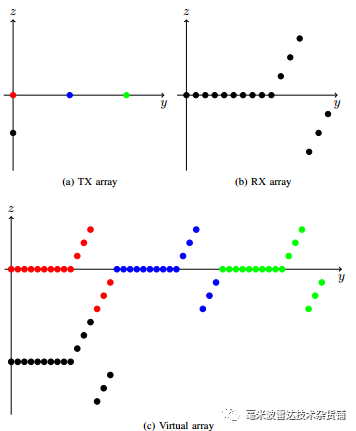
圖2 面陣布局“低配版”圖2中上圖是原始物理布局,下圖是MIMO虛擬陣列布局,這種設計往往在俯仰角求解上存在妥協(如4D FFT點數變少等)。但圖2 設計用于實際工程也是困難的。特別是天線設計要與商用集成式毫米波雷達芯片收發天線數目及位置匹配。并且目前大多數車載雷達都傾向于采用微帶天線,特別是Series Feed Patch Arrays,這給實際布局帶來新的挑戰。如圖3所示,TI公司給出的imaging radar demo板天線布局雖然能實現較好的方位及俯仰測角,但并不能說是好的布局,尤其給后續天線校準帶來高要求。而且類似的芯片級聯方案目前成本較高。
所以結合現階段商用集成雷達芯片的“高性價比”方案,俯仰角求解往往Monopulse方式更合適(類似布局如圖4所示),再結合MIMO體制更一步提高信噪比。相當于只用一根天線做俯仰角,俯仰面該天線與其他天線錯開距離滿足FoV內不模糊即可,而且俯仰面往往沒有分辨率要求,犧牲的精度可以通過后續算法解決(時間累積/目標分類等)。后續芯片成本或者天線工藝成本降低可進一步通過芯片級聯設計改善天線設計,從而提高俯仰測角精度。
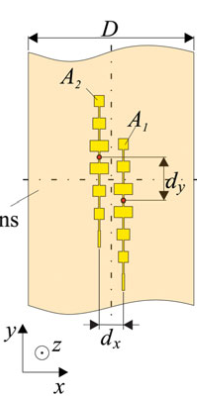
圖4 Monopulse布局目前車載雷達俯仰角的測量方式有很多,如圖6所示,ADC GmBH的ARS 300系列采用機械掃描方式進行俯仰角測量(個人感覺這類技術較為過時了),如今ARS都出到ARS 600系列(如圖7所示)了,并且ARS 600就是4D高分辨雷達,其俯仰測量方式目前未知。Bosch的MRR采用俯仰面天線方向圖幅值比來計算俯仰角,感興趣的可以參考文獻[4]。但是對于短距離高分辨4D Radar,基于相位的方式更合適。
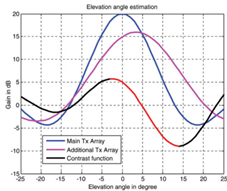
圖5 基于方向圖的俯仰角測量(Bosch MRR)
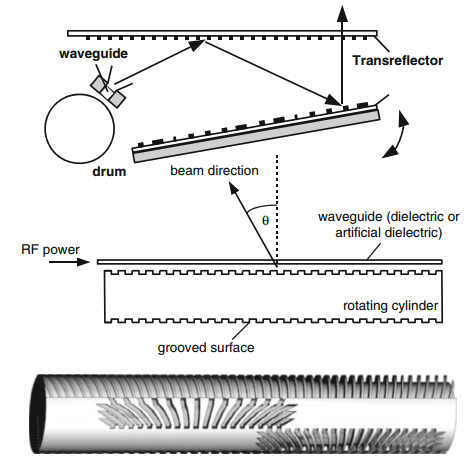
圖6 ARS 300(ADC GmBH)圖7 ARS 600(ADC GmBH)國外初創公司重點關注Oculii,這貨戲太多,有事沒事來中國吹牛逼,不過人家刷子還是有兩把的,由于它主推4D Radar,我一直在重點關注,其天線布局類似于圖8類型,這種布局相當有意思,以后會詳談,不過可以看出,其俯仰角測量是基于4D FFT的,或者采用超分辨算法,實際效果如圖9所示。個人感覺成本還是高的,芯片還要定制,所以這就是Oculii與英飛凌合作的原因之一?
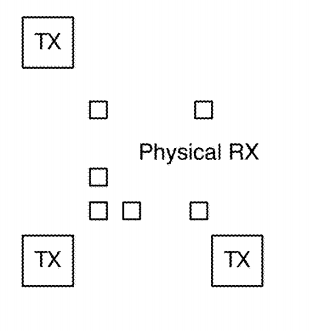
圖8 Oculii 布局方案(推測)
來源:毫米波雷達技術雜貨鋪公眾號
原文標題:4D雷達天線布局思考-俯仰角篇
文章出處:【微信公眾號:微波射頻網】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
天線
+關注
關注
70文章
3281瀏覽量
142347 -
雷達
+關注
關注
50文章
3119瀏覽量
120092 -
毫米波
+關注
關注
21文章
1973瀏覽量
66052
原文標題:4D雷達天線布局思考-俯仰角篇
文章出處:【微信號:mwrfnet,微信公眾號:微波射頻網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論