 如何使用Digilent Zybo Z7來搭建自動駕駛汽車的原型?
如何使用Digilent Zybo Z7來搭建自動駕駛汽車的原型?
自2020年以來,汽車行業開啟了新紀元,應用于汽車上的智能技術也逐漸進入人們的視野,其中就有高級駕駛輔助系統(ADAS)。有了它,汽車可以預先察覺路面可能發生的危險,司機根據系統運行、計算后的結果,進行加速、減速、轉彎、避讓......ADAS系統功能越強大,汽車就能夠應付越復雜的路況。
首先為了安全性,需要考慮的是駕駛過程中連接器、傳感器的深度融合。安全性能之外,可編程門陣列(FPGA)作為汽車算法的一部分則為自動駕駛提供了“大腦”,對行駛狀況進行實時計算,通過計算結果決定汽車的運行方向以及如何應對障礙物。
明白了基礎原理之后,羅馬尼亞布加勒斯特大學的學生們嘗試了動手實踐,他們通過Zynq 7000 SoC的硬件、軟件組合編程,集成完整的高級駕駛輔助系統(ADAS),并且裝載到了模型上,接下來就一起來看看他們是怎么做到的吧~
★
功能設計
★
羅馬尼亞布加勒斯特大學的學生們使用Digilent Zybo Z7來搭建自動駕駛汽車的原型。這輛自動駕駛汽車除搭載 OpenCV 和 Embedded Linux 以外,還具有以下主要功能:
在車道線之間行駛
遇到障礙物停止
探測道路交通標志
執行來自 RFID 卡的智能命令
在十字路口導航
★
零件構成
★
汽車由以下部件構成:
Digilent PCAM 5C 攝像頭傳感器
由非汽車級 Xilinx Zynq 7000 SoC 驅動的 Digilent Zybo Z7
聲納
RFID 掃描儀
3軸加速計
USB WiFi 適配器
高速和高轉扭金屬齒輪伺服機構
雙直流電動機驅動器
5V 穩壓器
6V 穩壓器
2200mAh 鋰聚合物電池
★
安裝指南
★
硬件平臺以 2 層塑料汽車框架為基礎,所有的附加安裝硬件和支承件均在 CAD 中設計并用 PLA 塑料 3D 打印成型。汽車框架還包括 2 個有刷直流電動機,其轉矩足以驅動汽車以較快的速度行駛。
轉向系統類似于卡丁車(阿克曼轉向),伺服機構在推動一個輪轂的同時通過推桿將運動傳導至第二個輪轂。轉向系統完全采用 3D 打印,幾乎無需組裝。汽車框架本身需要按個人需求鉆孔和設置安裝點,具體取決于不同的組件/傳感器如何安裝。
前輪像普通汽車一樣運動,從左向右轉向。攝像頭安裝在車前。攝像頭傳感器的頂端增設一個魚眼鏡頭,以擴展視野。RFID 掃描儀安裝在汽車底部。聲納安裝在前保險桿內,以防止撞車。加速計安裝在汽車頂端。
★
系統設計
★
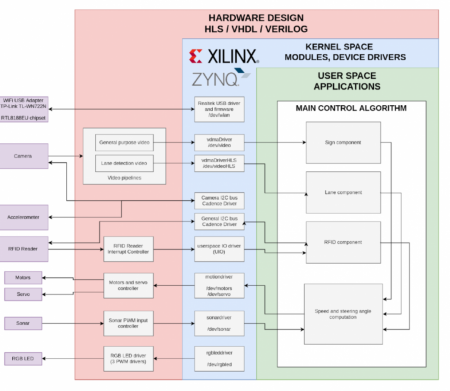
總體設計方框圖如下所示:
★
硬件設計
★
視頻管線和視頻處理 - 車道探測
Pcam 5C 探測到的 MIPI PHY 車道原始數據由 MIPI_D_PHY_RX 區塊和 MIPI CSI-2 接收器進行解譯和處理,接著 Bayer 格式流被傳輸到 AXI_Bayer_to_RGB 區塊,并輸出更有用的 AXI 流信號。所產生的 AXI 流被分為兩個相同的數據流,用于相應的應用。其中一個 720p 60Hz 被保留下來,而另一個則經過一系列圖像處理技術以獲得適合車道探測的灰度圖像。
傳感器數據采集和處理 - RFID、加速計和聲納
加速計和 RFID 讀數器通過同一根總線由 I2C 啟用,并直接連接至處理系統。傳感器通過 PWM 輸出信號連接至用于計算 PWM 占空比的區塊,并通過 AXI4-Lite 鏈路向處理系統提供最終數據。
電機和轉向控制
“電機和轉向”控制器又稱內部運動控制器,是用于管理雙電動機驅動器的區塊和直接控制前轉向的伺服機構。主區塊通過 AXI4-Lite 鏈路與處理系統通信,內部則由三個 PWM 發生器構成,并為分辨率和頻率使用可自定義的合成-時間參數。可選數值包括:電動機 - 2x 16 位、100kHz 驅動器;伺服機構 - 1x 12 位、50 Hz 驅動器。伺服機構需要特定的頻率和占空比才能正常運行。
★
軟件設計
★
Petalinux 嵌入式 Linux 版本
該項目以 Xilinx Petalinux 2017.4 的 Embedded Linux 為中心。Linux OS 相當于硬件和軟件之間的共同基礎,可用于管理流程。改進后的內核通過改良版 USB 驅動器為攝像頭、聲納、電動機和 WiFi 適配器伺服機構等物理設備提供支持。Xilinx 已包含 Zynq I2C 驅動器,可連接攝像頭、加速計和 RFID 讀數器。
主控制應用程序
1. 車道組件:將汽車定位在正確的路線上,并根據道路調節速度。
2. 標志組件:探測停車標志。
3. RFID 組件:正確地探測和儲存道路主要部位所放置的 RFID 卡。
4. 顯示組件:向用戶顯示相關圖像。
5. 配置/校準組件:使用戶能夠利用獨立文件來設置重要參數,無需重新編譯程序或覆蓋配置文件便可匹配當前道路狀況。
所有組件(除配置/校準以外)均循環運行。每次迭代對應一個框架。
原文標題:歐時課堂 | 如何“自制”智能汽車
文章出處:【微信公眾號:歐時電子RS】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
智能汽車
+關注
關注
30文章
3064瀏覽量
108247 -
自動駕駛
+關注
關注
788文章
14248瀏覽量
169990
原文標題:歐時課堂 | 如何“自制”智能汽車
文章出處:【微信號:歐時電子RS,微信公眾號:歐時RS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛安全基石:ODD

NVIDIA Halos自動駕駛汽車安全系統發布
理想汽車推出全新自動駕駛架構
自動駕駛的未來 - 了解如何無縫、可靠地完成駕駛







 工商網監
工商網監
評論