 基于C6678+Zynq-7045目標追蹤視覺方案推薦
基于C6678+Zynq-7045目標追蹤視覺方案推薦
隨著現代科技的高速發展,機器視覺技術在無人機、安防監控、工業檢測、ADAS高級駕駛輔助系統、醫療診斷等方面有著廣泛的應用。目標追蹤的視覺技術是計算機視覺領域的一個重要分支課題,有著重要的研究意義。
01
方案要點
(1) 圖像數據采集
通過可編程邏輯器件(例如FPGA)進行高速、高精度的圖像數據采集,且可靈活接入各種攝像頭,如CameraLink、SDI、PAL等。
(2) 目標追蹤分析
將采集得到的圖像數據通過高速數據總線(例如SRIO、PCIe等)傳輸至數字信號處理平臺(例如DSP),通過算法對圖像數據進行位置分析。
(3) 目標圖像監控
將處理后的圖像通過CameraLink、HDMI等接口進行實時顯示,并可對可視化界面進行控制。
0
02
方案推薦
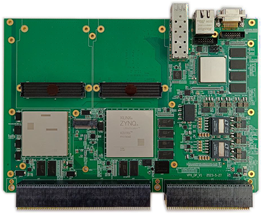
創龍科技(Tronlong)為您推薦基于TI TMS320C6678 + Xilinx Zynq-7045的高速多路高清視頻采集處理平臺,采用DSP+FPGA+ARM架構,可完美滿足目標追蹤關鍵指標。
圖 1 SOM-TL6678ZH核心板正面圖
圖 2 SOM-TL6678ZH核心板背面圖
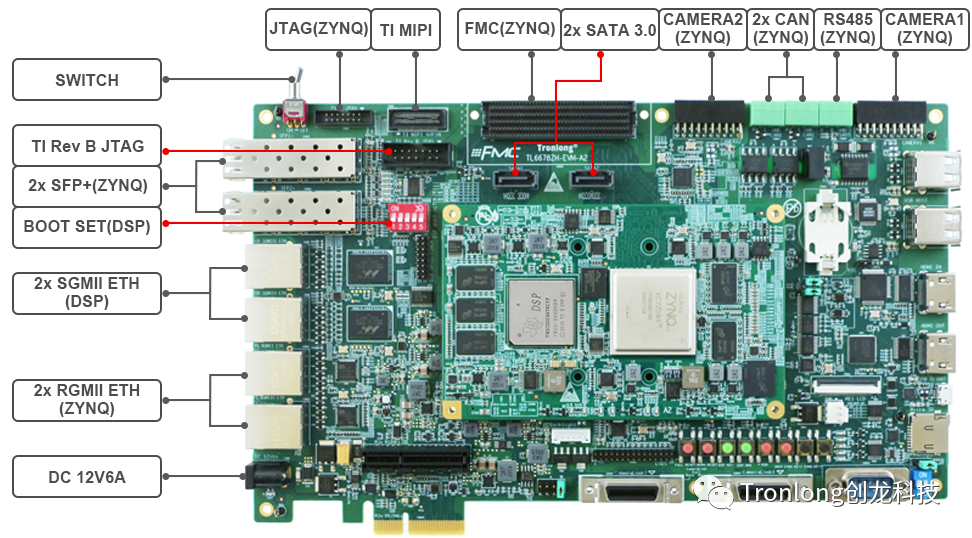
圖 3 TL6678ZH-EVM評估板資源圖1
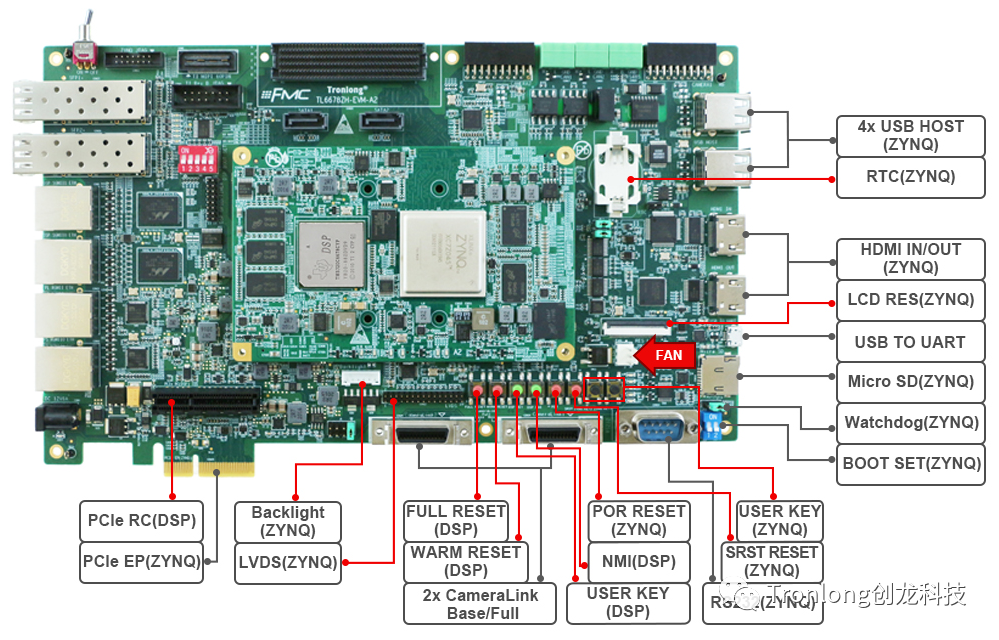
圖 4 TL6678ZH-EVM評估板資源圖2
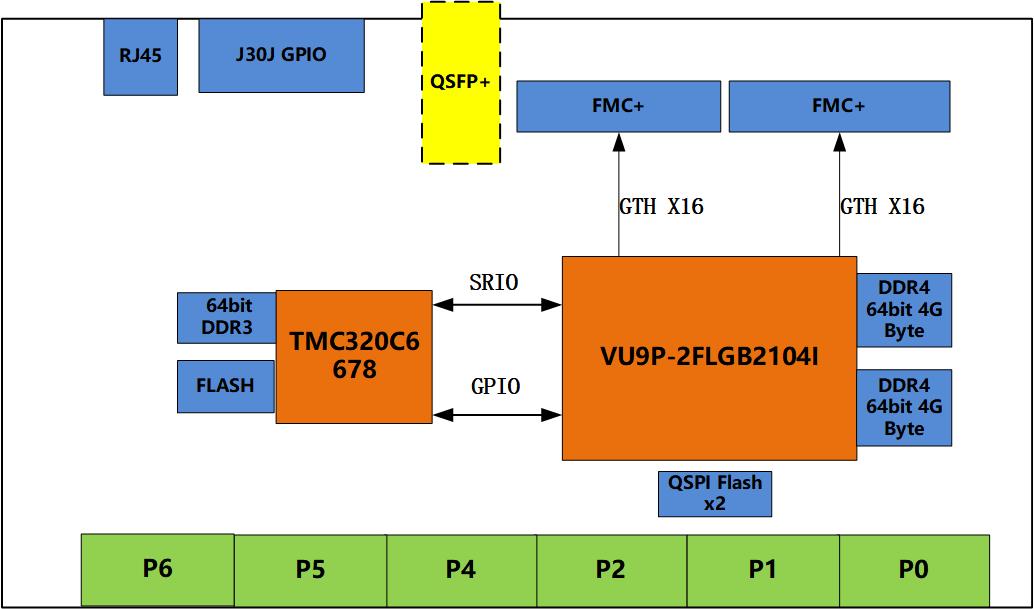
2.1 方案框圖
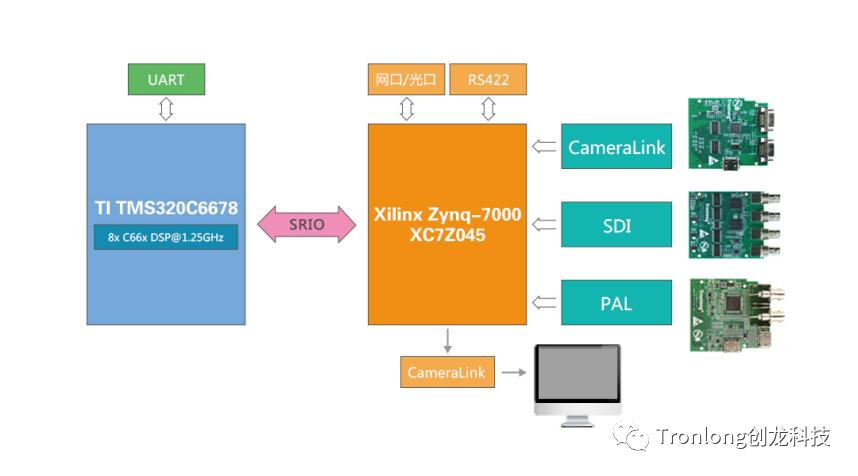
圖 5 方案框圖
2.2 方案優勢
(1) 高性能處理器
TMS320C6678集成八核C66x定點/浮點DSP,主頻可高達1.25GHz,運算能力可高達320 GMAC、160 GFLOP,算法能力強,滿足目標追蹤算法要求。
ZYNQ Z-7045/7100集成PS端雙核ARM Cortex-A9 + PL端Kintex-7架構28nm可編程邏輯資源,ARM主頻800MHz,硬件資源豐富。可通過PL端進行高速圖像數據采集,并通過PS端進行業務邏輯控制,運用十分便捷。
(2) 視頻接口豐富
可拓展眾多目標追蹤場合常用的視頻接口,如CameraLink、SDI、HDMI、PAL等。其中CameraLink可支持Full模式,最大支持傳輸速率5.4Gbps。
(3) 系統穩定可靠
核心板集成DSP和ZYNQ處理器,芯片間通過SRIO高速接口鏈接,核間通信更高速、更穩定。
核心板經過高低溫測試、振動測試、老化測試,并經過3000次系統掉電啟動測試,達到工業級品質,系統運行穩定。
2.3案例演示
案例功能:
(1)基于TL6678ZH-EVM評估板接入CameraLink相機采集圖像,把圖像數據傳輸到DSP進行Sobel(邊緣檢測)算法處理(客戶可自行替換為目標追蹤算法),最后通過網絡輸出處理結果。
(2)CameraLink相機參數:分辨率2560 x 2048,幀率107,灰度輸出,每個像素8bit,數據量為2560 x 2048 x 107 x 8 ≈ 4.5Gbps。
(3)C6678與Zynq-7045通過SRIO接口的兩個Lanes進行高速數據傳輸,每個Lane傳輸速率為5Gbps,總數據有效帶寬為5Gbps x 2 x 80% = 8Gbps。
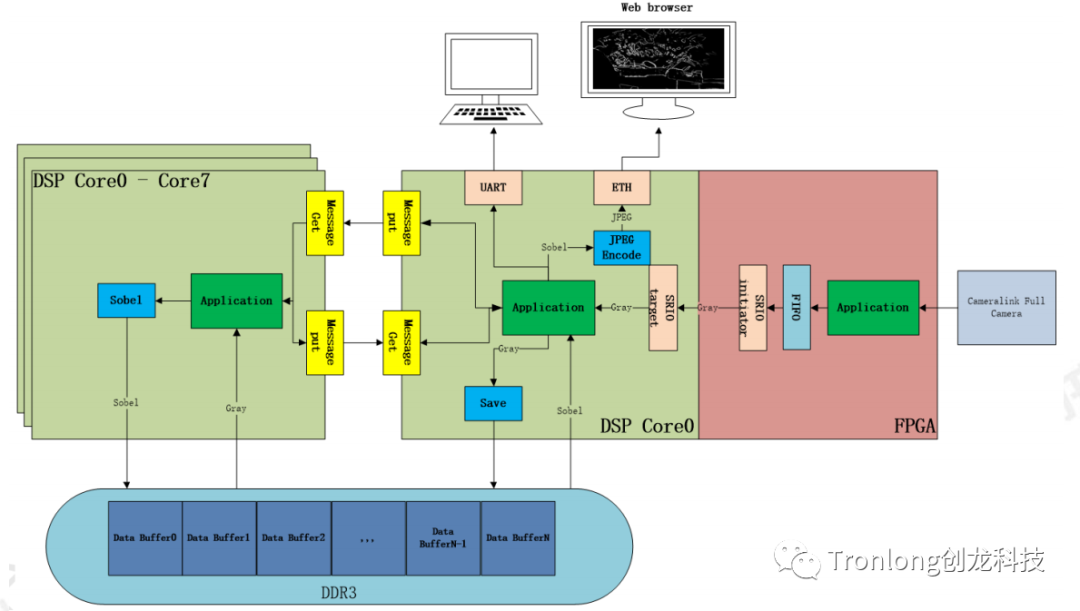
圖 6 案例功能框圖

圖 7 PL端程序功能框圖
圖 8 測試連接圖
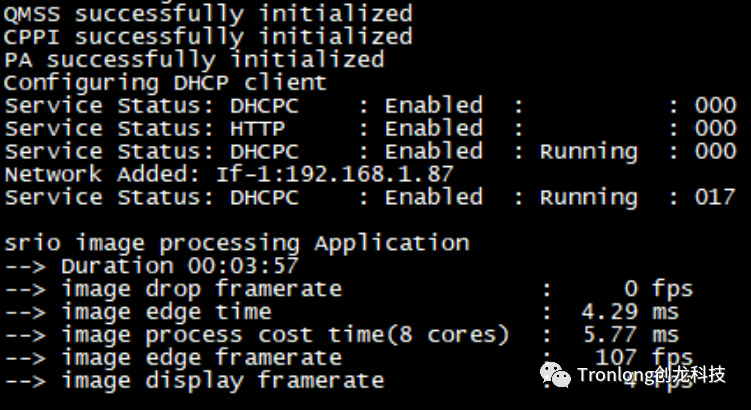
圖 10 處理結果
編輯:jq
-
FPGA
+關注
關注
1630文章
21781瀏覽量
604964 -
sRIO
+關注
關注
1文章
31瀏覽量
21044 -
PCIe
+關注
關注
15文章
1248瀏覽量
82938
原文標題:目標追蹤視覺方案推薦,基于C6678+Zynq-7045
文章出處:【微信號:Open_FPGA,微信公眾號:OpenFPGA】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于6U VPX的TMS320C6678+XCVU9P的高性能處理平臺
高速圖像處理卡設計原理圖:527-基于3U VPX XCZU15EG+TMS320C6678的信號處理板
6U CPCI板卡設計方案:8-基于雙TMS320C6678 + XC7K420T的6U CPCI Express高速數據處理平臺
鐳神智能激光雷達低空無人機目標追蹤光電系統:筑牢機場低空安防屏障

[XILINX] 正點原子ZYNQ7035/7045/7100開發板發布、ZYNQ 7000系列、雙核ARM、PCIe2.0、SFPX2!
TMS320C6678多核固定和浮點數字信號處理器數據表

SM320C6678-HIREL多核固定和浮點數字信號處理器數據表
目標檢測與識別技術的關系是什么
迅為RK3588開發板RKNPU2項目實戰2SORT目標追蹤
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
卡爾曼濾波是什么 卡爾曼濾波與目標追蹤技術分析

KU115+ZU19EG+DSP6678的雙FMC 6U VPX處理板
機器視覺檢測技術,賦能食品包裝多場景應用

機器視覺的圖像目標識別方法綜述






 工商網監
工商網監
評論