") 使用過(guò)程仿真函數(shù)模擬PID控制的過(guò)程
使用過(guò)程仿真函數(shù)模擬PID控制的過(guò)程

練習(xí)目的:使用過(guò)程仿真函數(shù)模擬PID控制的過(guò)程,熟悉PID函數(shù)的使用和調(diào)試。
練習(xí)要求:通過(guò)對(duì)一個(gè)過(guò)程的控制,實(shí)現(xiàn)預(yù)整定和精細(xì)整定并得到PID參數(shù)。
1) 在CPU1511中創(chuàng)建一個(gè)循環(huán)中斷并設(shè)定循環(huán)時(shí)間為200ms。例如OB31
2) 在OB31中調(diào)用PID函數(shù)PID_compact,然后在全局庫(kù)中打開(kāi)庫(kù)文件《Sim_controllprocess_V13_SP1》,并調(diào)用過(guò)程仿真函數(shù)Sim_PT3,連接PID控制函數(shù)與仿真函數(shù)的管腳。
3) 在“工藝對(duì)象”標(biāo)簽中選擇對(duì)應(yīng)的工藝對(duì)象(PID控制函數(shù)的背景數(shù)據(jù)塊),在“組態(tài)”欄中設(shè)置PID參數(shù),這里只設(shè)置PID的輸入和輸出,其它參數(shù)保持缺省設(shè)置。最后下載程序和參數(shù)配置。
4) 在“調(diào)試”界面中進(jìn)行參數(shù)自整定,可以選擇“預(yù)調(diào)節(jié)”方式,整定完成之后如果整定效果滿(mǎn)足工藝要求,可以上傳PID參數(shù)到項(xiàng)目中。
5) 如果輸出震蕩,可以再次選擇精細(xì)調(diào)節(jié)模式進(jìn)行整定。精細(xì)整定將在輸出上產(chǎn)生激勵(lì),經(jīng)過(guò)計(jì)算后再平滑輸出。
原文標(biāo)題:西門(mén)子S7-1500PLC實(shí)現(xiàn)PID控制方法
文章出處:【微信公眾號(hào):PLC技術(shù)圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
plc
+關(guān)注
關(guān)注
5031文章
13853瀏覽量
473354 -
西門(mén)子
+關(guān)注
關(guān)注
98文章
3150瀏覽量
118040 -
PID
+關(guān)注
關(guān)注
37文章
1481瀏覽量
87734
原文標(biāo)題:西門(mén)子S7-1500PLC實(shí)現(xiàn)PID控制方法
文章出處:【微信號(hào):xue_PLC,微信公眾號(hào):PLC技術(shù)圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
掃描電機(jī)的PID恒速控制仿真及實(shí)驗(yàn)
PLC在使用過(guò)程中常見(jiàn)的技術(shù)故障分析及維護(hù)
永磁同步直線電機(jī)的粒子群PID空間矢量控制
PID控制詳解(可下載)
量水堰計(jì)在使用過(guò)程中常見(jiàn)問(wèn)題剖析
量水堰計(jì)在使用過(guò)程中會(huì)遇到哪些常見(jiàn)的故障?

求助,關(guān)于ADS1298R使用過(guò)程中遇到的疑問(wèn)求解
PID控制中的反饋機(jī)制解析
基于PID控制的溫度調(diào)節(jié)系統(tǒng)
如何選擇合適的PID控制器
在焊接中應(yīng)用PID控制技術(shù)
PID控制的優(yōu)缺點(diǎn)分析 PID參數(shù)調(diào)節(jié)的常見(jiàn)方法
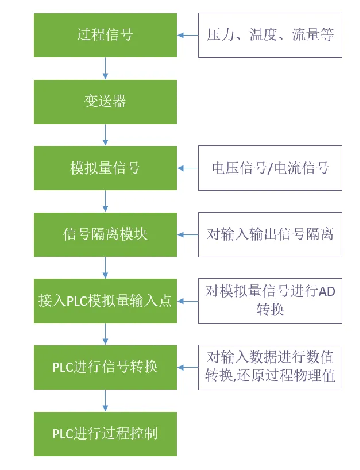
PLC對(duì)模擬量信號(hào)的處理過(guò)程及方法 詳解版
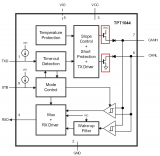
CAN總線應(yīng)用常見(jiàn)問(wèn)題(2)CAN總線應(yīng)用過(guò)程中的常見(jiàn)問(wèn)題和解決辦法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論