") 如何保障傳感器所收集數(shù)據(jù)的正確性
如何保障傳感器所收集數(shù)據(jù)的正確性
傳感器降噪
在工業(yè)4.0的未來圖景中,無論是智能工廠還是無人汽車,都需要在電子設(shè)備上安裝傳感器以收集相關(guān)數(shù)據(jù),做出決策。例如,動態(tài)傳感器會監(jiān)測加速計、速率陀螺儀、磁力計和旋光度等數(shù)據(jù),而靜態(tài)傳感器則讀取溫度、濕度、光和氣壓等數(shù)據(jù)。
這些實用設(shè)備的一大共同點是具有或大或小的輸出噪聲。這些輸出噪聲會導(dǎo)致傳感器收集數(shù)據(jù)的不準(zhǔn)確性,從而使機(jī)器出現(xiàn)故障,因此能夠抑制噪聲干擾,保障設(shè)備和傳感器正常工作的噪聲濾波器就至關(guān)重要。
何謂“噪聲”?
最初人們把造成收音機(jī)這類音響設(shè)備所發(fā)出噪聲的那些電子信號,稱為“噪聲”。但是,一些非目的的電子信號,對電子線路造成的后果并非都和聲音有關(guān)。后來,人們將電路中除目的的信號以外的一切信號稱為噪聲。
電源噪聲是電磁干擾的一種
其傳導(dǎo)噪聲的頻譜大致為10kHz~30MHz,最高可達(dá)150MHz。電源噪聲,特別是瞬態(tài)噪聲干擾,其上升速度快、持續(xù)時間短、電壓振幅度高、隨機(jī)性強(qiáng),對傳感器易產(chǎn)生嚴(yán)重干擾。
靜態(tài)傳感器降噪
靜態(tài)傳感器一般用于環(huán)境監(jiān)測,通常只需在較長的間隔內(nèi)生成一次讀數(shù)。例如氣象站可能只需每隔15分鐘讀取一次氣溫、濕度、氣壓。其余時間,它以極低的功耗運行或進(jìn)入休眠模式。
這類遠(yuǎn)程感應(yīng)站通過電池或太陽能供電,并使用無線通信連接,測量速率較慢,因此可以使用簡單的平均算法以排除隨機(jī)噪聲,無需精密的濾波。
動態(tài)傳感器降噪
在各種移動設(shè)備中,人們通常使用陀螺儀和加速計來監(jiān)測移動數(shù)據(jù),然而這兩種傳感器各有缺陷,因此需要使用降噪濾波器“融合”二者,消除缺陷,生成單一的準(zhǔn)確輸出信號。
陀螺儀設(shè)備如果速度輸出有小幅偏差,積分后會產(chǎn)生角度錯誤,時間越長時錯誤越嚴(yán)重,會產(chǎn)生“漂移”。而加速計響應(yīng)變化的速度相對較慢,而且在有振動時,它們通常會產(chǎn)生很大的輸出噪聲。
例如近年來,小型無人機(jī)深受科技愛好者和攝影師們的歡迎,但在在加速計和陀螺儀受到電子噪聲干擾時,即使資深的無人機(jī)操作者也可能失控。因此專業(yè)無人機(jī)常常攜帶兩個 GPS 模塊,并且通過卡爾曼濾波器“融合”慣性測量單元,利用其自適應(yīng)功能選擇最佳傳感器數(shù)據(jù),忽略最差數(shù)據(jù)。
Kalman卡爾曼濾波器
卡爾曼濾波器算法于上個世紀(jì)60 年代推出,目的是去除干擾信號的零均值噪聲,適用于任何可用線性公式描述的系統(tǒng)。它因用于 NASA 阿波羅制導(dǎo)計算機(jī)上運行的慣性導(dǎo)航程序而名聲大噪。
如今,大多數(shù)噪聲環(huán)境下的實時傳感器驅(qū)動應(yīng)用今天仍在使用它。卡爾曼濾波器使用看似簡單的兩步處理法來預(yù)測輸出,然后將預(yù)測結(jié)果與測量結(jié)果對比,以更新下一次預(yù)測。同時,它還會更新與傳感器測量相關(guān)“不確定”因素。
當(dāng)下的時代是“萬物互聯(lián)”的時代,傳感器的重要性正在凸顯,傳感器所收集的數(shù)據(jù)將會成為未來社會建設(shè)的基石。所以,保障傳感器所收集數(shù)據(jù)的正確性,避免噪聲干擾,是我們需要做的努力。
責(zé)任編輯:haq
-
傳感器
+關(guān)注
關(guān)注
2564文章
52668瀏覽量
764259 -
濾波器
+關(guān)注
關(guān)注
162文章
8095瀏覽量
181204
原文標(biāo)題:歐時課堂 | 利用噪聲濾波器為傳感器降噪
文章出處:【微信號:歐時電子RS,微信公眾號:歐時RS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
智慧路燈傳感器的工作原理與數(shù)據(jù)可靠性保障
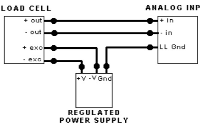
如何連接稱重傳感器,安裝稱重傳感器要記住的正確方式
DAC0832的典型接法幾點正確性的疑問求解
傳感器在低空經(jīng)濟(jì)中的應(yīng)用

根據(jù)ADS1292R Data sheet組了一個前端電路,請問要如何測試電路的正確性?
什么是傳感器的采樣率
ADS5282如何通過其他方式驗證寄存器寫入的正確性?
電腦如何直接使用rs232串口控制PGA460?如何檢測回復(fù)的數(shù)據(jù)的正確性?
電子控制裝置的主要傳感器有哪些?
何謂地磁傳感器?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論