") 基于雙曲函數(shù)的Preisach類(lèi)遲滯非線性建模與逆控制
基于雙曲函數(shù)的Preisach類(lèi)遲滯非線性建模與逆控制

實(shí)驗(yàn)名稱(chēng):功率放大器基于雙曲函數(shù)的Preisach類(lèi)遲滯非線性建模與逆控制
實(shí)驗(yàn)內(nèi)容:
壓電陶瓷、磁致伸縮等智能材料制備的驅(qū)動(dòng)器件被廣泛應(yīng)用于精密定位領(lǐng)域,但這些智能材料,本身所固有的遲滯非線性嚴(yán)重制約了定位系統(tǒng)的控制精度,并由可能導(dǎo)致系統(tǒng)不穩(wěn)定。為了減小遲滯非線性對(duì)系統(tǒng)的不利影響,通常采用基于遲滯模型的控制方法。
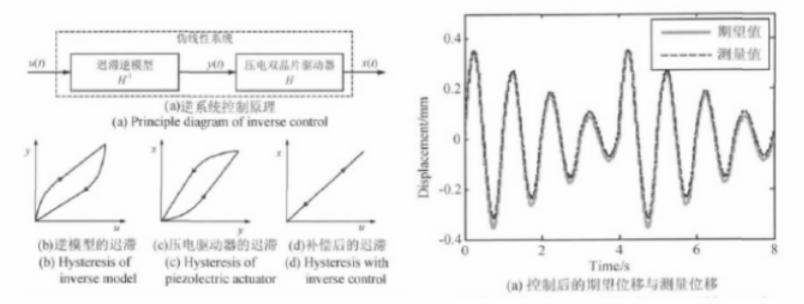
本文基于雙曲函數(shù)描述Preisach類(lèi)的遲滯非線性,分別采用2個(gè)雙曲函數(shù)描述遲滯主環(huán)的上升段與下降段,并通過(guò)坐標(biāo)變換擬合依附于主環(huán)的一階曲線,然后根據(jù)Preisach模型的記憶擦除性與次環(huán)一致性原理,用一階上升曲線描述次環(huán)的上升段,一階下降曲線模擬次環(huán)的下降段。基于這種遲滯模型設(shè)計(jì)了逆控制器來(lái)補(bǔ)償壓電雙晶片驅(qū)動(dòng)器的遲滯非線性,提高了定位控制的精度。
實(shí)驗(yàn)過(guò)程:
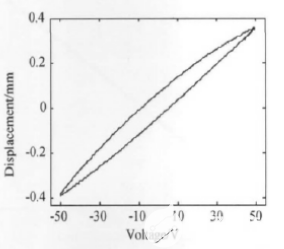
為了驗(yàn)證雙曲函數(shù)模型的有效性,設(shè)計(jì)了逆控制器用于壓電雙晶片驅(qū)動(dòng)器的精度定位系統(tǒng),實(shí)驗(yàn)系統(tǒng):裝有dSPACE系統(tǒng)的計(jì)算機(jī)通過(guò)功率放大器將驅(qū)動(dòng)電壓作用在壓電雙晶片上,通過(guò)光纖位移傳感器測(cè)量壓電雙晶片的位移,并將信號(hào)傳回dSPACE板卡。為了比較控制效果并獲得遲滯模型的辨識(shí)數(shù)據(jù),測(cè)量了壓電雙晶片驅(qū)動(dòng)器在頻率為1Hz、50V峰值正弦信號(hào)作用下的響應(yīng)。

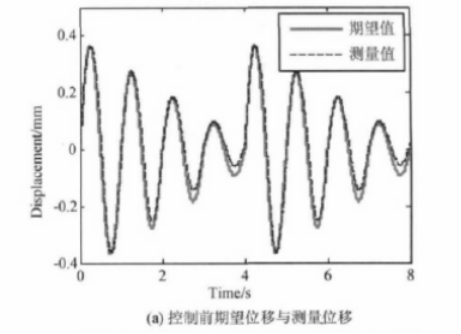
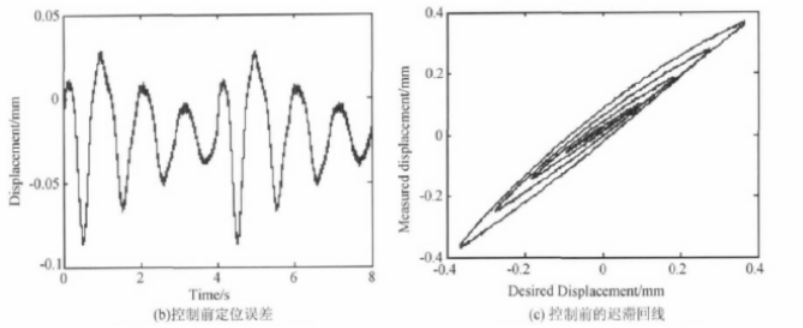
控制前:
為了同時(shí)測(cè)試遲滯主環(huán)與次環(huán)的控制結(jié)果,期望采用1Hz變幅值的正弦信號(hào)。
控制后:如果遲滯逆模型足夠精確,將與壓電雙晶片驅(qū)動(dòng)器的遲滯非線性相互抵消,使期望位移與響應(yīng)位移線性化。
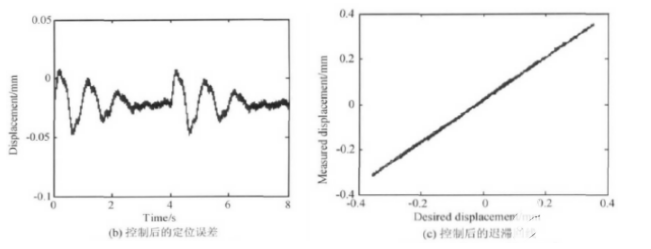
實(shí)驗(yàn)結(jié)果:
本文基于雙曲函數(shù)描述Preisach類(lèi)的遲滯非線性,分別采用2個(gè)雙曲函數(shù)描述遲滯主環(huán)的上升段與下降段,并通過(guò)變換坐標(biāo)擬合了依附于主環(huán)的一階上升與下降曲線,然后根據(jù)記憶擦除性與次環(huán)一致性描述遲滯非線性的任意次環(huán)。這種建模方法所需的模型參數(shù)遠(yuǎn)小于經(jīng)典的Preisach模型,而且參數(shù)識(shí)別容易,使用該模型的前提是雙曲函數(shù)能夠擬合遲滯非線性的主環(huán),這適用于控制壓電驅(qū)動(dòng)器等智能材料的遲滯非線性。基于該遲滯模型設(shè)計(jì)了壓電雙晶片驅(qū)動(dòng)器的逆控制器,使控制后的最大定位誤差比控制前減小了44.26%,可有效抑制遲滯非線性引起的誤差.
本文實(shí)驗(yàn)素材由西安安泰電子整理發(fā)布,如想了解更多實(shí)驗(yàn)方案,請(qǐng)持續(xù)關(guān)注安泰電子。
審核編輯:湯梓紅
-
放大器
+關(guān)注
關(guān)注
145文章
14144瀏覽量
217214 -
控制
+關(guān)注
關(guān)注
5文章
1024瀏覽量
123830 -
功率
+關(guān)注
關(guān)注
14文章
2100瀏覽量
71693
發(fā)布評(píng)論請(qǐng)先 登錄
無(wú)軸承異步電機(jī)氣隙磁場(chǎng)定向逆解耦控制
無(wú)刷直流電機(jī)控制系統(tǒng)的建模仿真分析
磁性編碼器非線性誤差補(bǔ)償及在重型機(jī)床高精度伺服控制中應(yīng)用
線性運(yùn)算放大器和非線性運(yùn)算放大器的區(qū)別
非線性負(fù)載分為哪些類(lèi)型
線性光學(xué)和非線性光學(xué)有什么區(qū)別?
非線性負(fù)載產(chǎn)生諧波的原因及危害
RCD非線性負(fù)載:原理、應(yīng)用與優(yōu)勢(shì)

二極管的非線性特性對(duì)電路的影響
非線性光耦與線性光耦的差別
射頻放大器的的線性和非線性特性





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論