 自制一個Arduino繪圖機器人
自制一個Arduino繪圖機器人

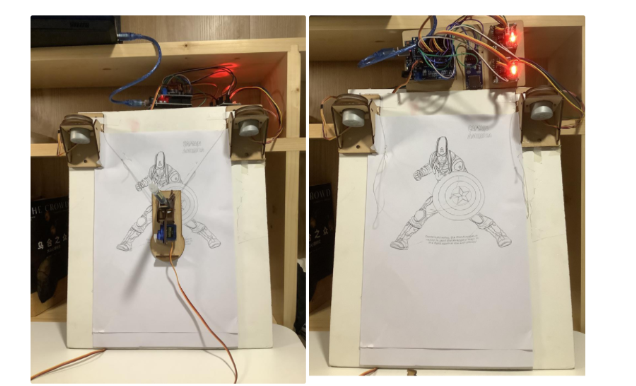
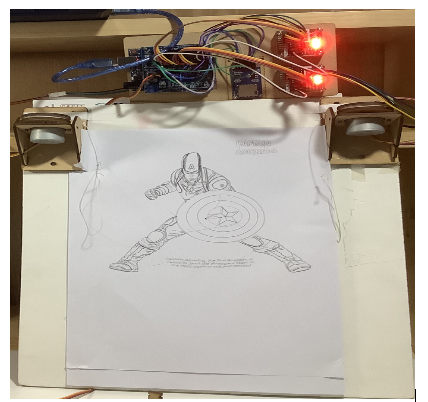
在我們的生活中,藝術無處不在,即使是像機器人這樣冰冷的工具,也能給我們帶來很多藝術的樂趣。當我看到尤菲的視頻時,我看到了繪畫機器人的新可能性,很高興看到他們把虛擬的東西變成了一個真實的實體,它可以自動拿著筆在紙或任何物體的表面上畫畫,以及平臺繪圖不僅限于水平面,您還可以在墻上嘗試。
拉線墻繪機是一個非常早期的項目,但由于機器原因一直沒有更好的解決方案。最近,我們針對步進電機支架和筆筒的問題,闡述了一個相當出色的解決方案。步進電機采用28byj,體積小,接線方便,程序簡單,沒有驅動、焊接、供電等問題,可以用Arduino直接供電。電機和主板集成了一個底座,兩邊都有一個繞線架,可以貼在任何墻上,畫板的上角。
讓我們開始吧,看看如何制作如此出色的項目!
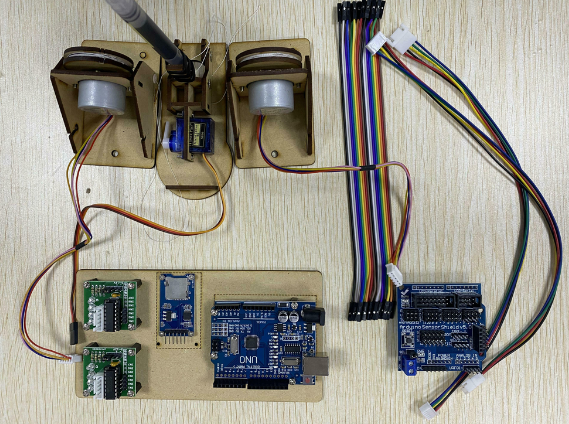
第1步:物料清單
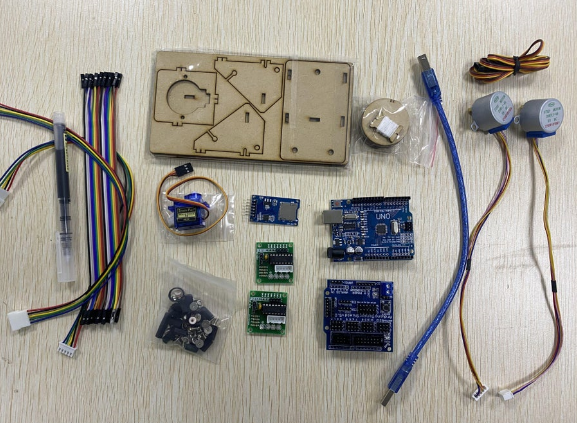
該項目由以下組件組成:
ArduinoUNOR3x2
電機支架x1
28BYJ-48步進電機驅動板x2
SG90伺服馬達x2
微型SD卡適配器x1
Arduino傳感器護罩x1
提筆舵機x1
線軸x2
吊帶x1
跳線
筆x1
第2步:底座支架組裝
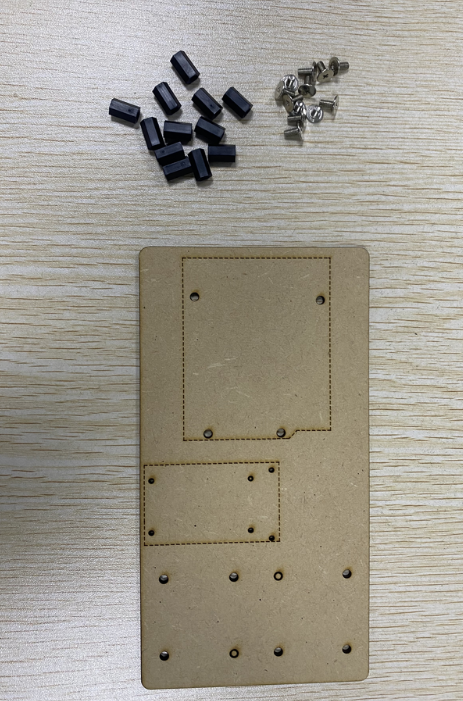
第一步很簡單,首先我們找到12個大頭螺釘和12個黃銅柱,從后面擰入大頭螺釘并固定所有黃銅柱
然后我們安裝了電機驅動板,以便Arduino驅動步進電機。需要電機驅動板是因為Arduino的輸出引腳不能直接為步進電機提供足夠的功率,需要5V電源才能運行。
最后,將兩個ArduinoUNO安裝在黃銅柱上,最后用最小的螺絲將SD/TF讀卡器固定在頂部。
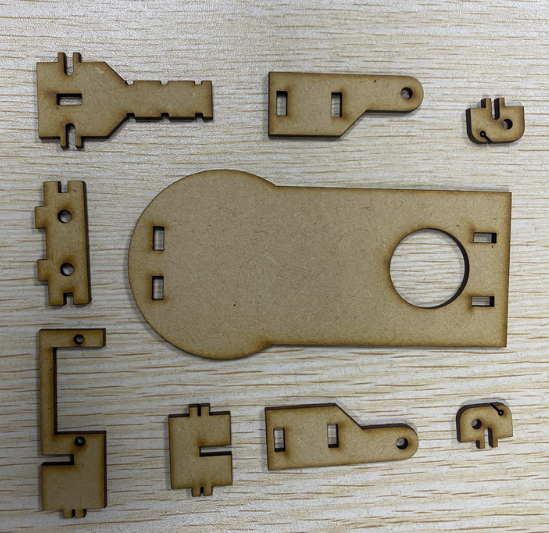
第3步:步進電機支架組件

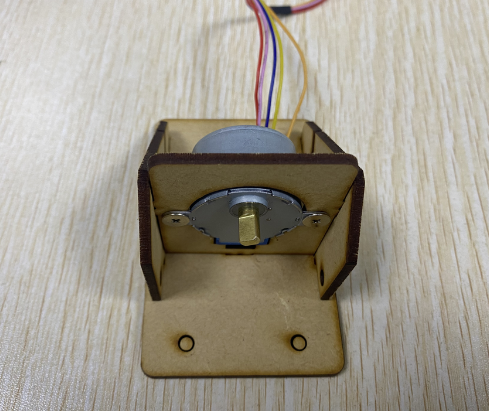
這一步有很多事情要做,但并不難,只是需要更多的耐心。電機安裝有3個步驟:
1.安裝電機
準備一個電機支架,將其斷開,然后根據第二張圖重新組裝電路板。
向下,用螺絲固定立管手機,然后安裝電機。
2.制作線軸
將電纜環系在電纜末端,將電纜拉入電源線背面的縫隙中,然后檢查線軸周圍的電纜。
在拉線的另一端,系上一根粗繩,可用于下一步的筆。然后蓋板蓋住支架板上的孔并安裝到支架上的孔中。
使用螺絲孔將電機支架安裝在繪圖板或墻壁的末端,使其處于同一水平。
提醒:繞線時,記得順時針繞左梭芯,逆時針繞右梭芯。
3.筆筒總成
首先,我們需要將需要安裝的桶形筆折斷,將大端的出口貨螺絲通過口插入并擰緊。
在此之后,我們安裝無人機。如圖所示,安裝后重心在正中,運行更平穩。
接下來,使用大端固定左右側面板和軸切口。請記住,轉動軸的螺釘不應擰緊。
確定筆的位置后,用繩子系好。在調整筆的位置時,非常適合讓筆尖觸摸的極致繪圖質量。盡可能握住筆架。
至此,電機支架就完成了。
第4步:連接
為了插上舵機設備,我們將屏蔽板插在UNO上,注意將屏蔽板引腳對準UNO的接線孔。
1.拉線步進電機M1、M2:四根信號線in1、in2、in3、in4分別對應Arduino2、3、5、6,另一邊分別對應7、8、9、10。電源線連接到+的VCC和-的GND。步進電機控制板有專用線連接電機,防假插不會錯。
2.提筆舵機可接13。舵機線為棕色GND,紅色VCC,黃色為信號。如果您使用SD讀卡器,則可以連接到A0端口。
備注:
(可選)TF、SD讀卡器:CS接4,MoSi接11,miso接12,SCK接13#,(如果提筆舵機從13換成A0等其他端口,程序也需要做相應的更改。見程序注釋。)VCC為+,GND為-(G和V可以接屏蔽板的任意一組G和V接口),3.3V不接(VCC,5V,+指電源正極。G、GND、-均為負極)
SD或TF讀卡模塊不支持SDXC以上標準卡,請選擇比較老的小容量卡,會有更好的性能兼容性。一般16g及以下的卡都是FAT32格式,不是NTFS或exFAT格式,可以使用。一些TF轉SD卡持有人也可能存在不兼容問題。如果只有TF卡可用,推薦使用TF讀卡器模塊。
第5步:編程
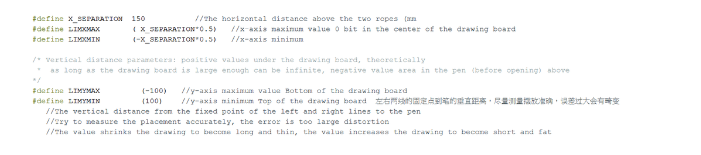
我們會為您提供相應的代碼,但仍有部分代碼需要根據您的實際大小進行修改,需要修改的部分代碼如下。
1、首先運行2Steper.ino,這個程序的作用是讓步進電機工作并畫出擺圖,比較簡單,只要調整轉數改變圖案即可。位置可能會差很多,直接運行程序時,擺臂可能會轉到完全不相關的位置,很麻煩。
2.主程序是WallDrawDemo.ino,會畫幾個圖案進行測試。先不要裝筆(線架可以掛在筆架上),運行程序,讓筆架空運行一會,看是否運行范圍,是否在紙張范圍內。如果超過了,參數還是需要調整的,幾個參數的具體功效見程序說明幾個參數的作用在程序說明中有說明。
3.下一步是將我們的代碼上傳到Arduino板,代碼可以在這個instructable的底部找到,請確保您在ArduinoIDE中選擇ArduinoUno,用于您使用的設備(ArduinoUno)。
如果您不熟悉Arduino,請按照以下步驟操作:
通過USB將您的Arduino板連接到您的計算機
打開ArduinoIDE(如果沒有,請務必從他們的官方網站下載)
打開我們在Instructable頁面底部提供的項目
在ArduinoIDE頂部選擇“Tools》Board》ArduinoUno”,選擇板子對應的端口號COM((無法識別的設備請安裝Ch340驅動)
單擊V符號以驗證代碼,然后在其旁邊的向右箭頭按鈕推送代碼!
2Steper.ino
WallDrawDemo.ino
第6步:上傳您想要的圖片
當您完成前面的步驟調試后,您可以上傳自己想要的圖像進行繪圖。
如何上傳你的圖片?
不能畫任何照片,只能畫矢量圖。幸運的是,有些照片可以通過軟件轉換成矢量圖。(您可以使用Coreldraw、Inkscape和許多其他軟件處理)或先嘗試簡單的矢量圖。
1.矢量圖要轉成gcode文件。Gcode是一個文本文件,可以用手寫板打開和編輯。在使用它之前,您可以瀏覽gcode中的值,這些值以實際毫米為單位,如果有成千上萬的值可能會導致步進電機在停止前轉幾個小時,這是災難性的。具體gcode規則和使用網上很多,大家可以自行學習。
2.Gcode文件保存在內存卡中,Arduino從卡中讀取文件,將位置坐標解析成步進電機的動作,拉動繩子帶動筆畫。(包中的WallDraw.ino程序可以執行此步驟)
特別提示:
內存卡最好是fat32格式,ntfs格式的文件可能無法讀取,尤其是32G以上容量的卡。
Gcode文件的文件名要和程序中定義的一樣,一般是“1.nc”,如果不同,請改成同名。
然后需要在Arduino中刷WallDrawGCode程序。使用USB數據線連接您的計算機和Arduino,然后在您的計算機上打開CNCjs。
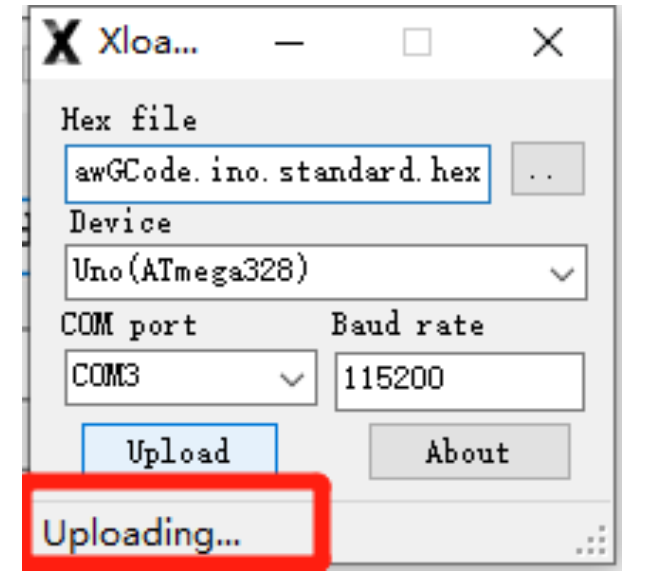
首先,使用XLoad將編譯好的BIN文件刷入Arduino
在XLoad中打開我們提供給您的WallDrawGCode.ino.standard.hex文件,Device選擇Uno,端口選擇COM,波特率選擇115200(無法識別的設備請安裝Ch340驅動)
最后點擊Upload按鈕,狀態欄會顯示Uploading.。。提示,成功后關閉。
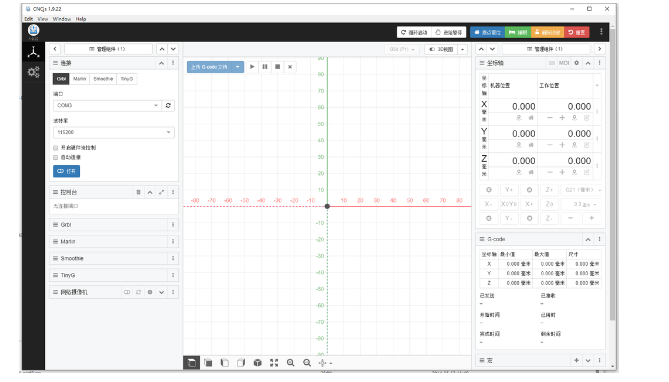
將程序上傳到Arduino后,在電腦端安裝CNCjs應用程序,選擇Grbl,搜索后會自動顯示端口號,波特率選擇115200,打開并建立連接。
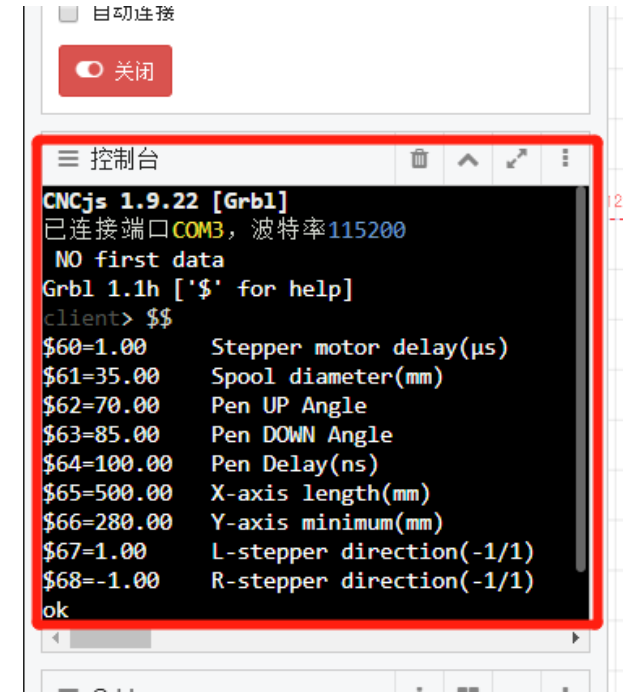
正常連接后,控制臺會顯示如下內容。并且有OK提示。
您可以通過在提示后輸入一個簡單的GCode來測試它。
G01x0y0z0//落筆
G01Z1//提筆
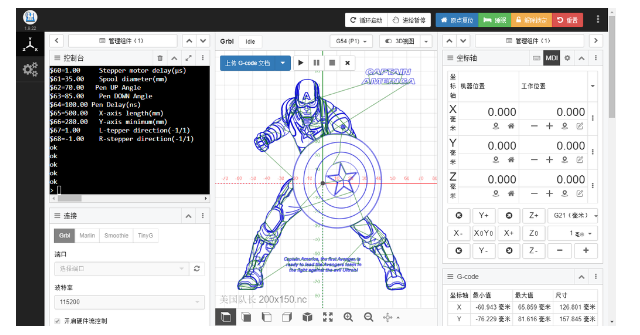
如果測試OK,就可以打開GCode文件開始繪圖了!
第7步:結論
在制作的過程中我們也遇到了很多問題:
1.第一個重要的一點是固定筆在上面只能露出一點筆架,不要伸出一半筆,這樣會導致抬不起來。
2.如果您的舵柄擺臂一直在向上移動,則不能抬起筆筒。簡單的解決辦法是把伺服臂取下來,換成可以抬起筆架的,然后裝在伺服主軸上。或者在程序中調整舵機的參數,讓舵機改變旋轉角度。請勿帶電轉動舵機,否則會損壞舵機。
3.另外,繪制的圖像嚴重失真。解決方法是先確認方向是否正常。如果用Walldrawdemo的程序測試,九紋在上,桃心在左下,蝴蝶曲線在右下。如果方向不對,先參考上一題,修改方向。大多數情況下,變形是由于方向不對,所以尺寸不對。如果方向正確,x軸測量的尺寸不會出現太大的誤差,也不會出現嚴重的變形。
4.注意如果電機閥芯狂轉,拉線是不正常的。
5.另外一種情況是,如果你是用GCode作圖,可能是GCode中的尺寸相對于畫板尺寸來說太大了,所以即使筆筒撞到了電機座,線軸也會不停地轉動,或線軸完全松開后仍在旋轉。檢查GCode中是否有非常大的值,例如G01X7777Y6666或一些此類代碼。
6.最后一點,畫板很小,比如間距只有150mm,但是gcode超過了畫板的大小(比如使用了A3大小的文件),計算出來的值會溢出,電機將繼續選擇旋轉。
-
機器人
+關注
關注
213文章
29748瀏覽量
212939 -
Arduino
+關注
關注
190文章
6498瀏覽量
192206
發布評論請先 登錄
ARDUINO基礎入門,帶你進入自制智能機器人的時代
【KittenBot機器人試用申請】KittenBot繪圖避障機器人學習課程
怎樣去設計基于stm32的繪圖機器人
設計一個低預算XY繪圖儀繪圖機器人板
Scribit墻壁繪圖機器人:一款可以在墻上涂鴉和創作的機器人
基于CNC的繪圖機器人Arduino GRBL CoreXY Drawbot






 工商網監
工商網監
評論