 視覺成像技術幫助機器人和汽車看得更清楚
視覺成像技術幫助機器人和汽車看得更清楚

盡管機器人的眼睛沒有視網膜,但幫助它們更自然、更安全地觀察和與世界互動的關鍵是眼科醫生辦公室里常見的光學相干斷層掃描(OCT)儀器。
許多機器人公司正在將一種成像技術集成到他們的傳感器包中,即光探測和測距,簡稱LiDAR。目前,無人駕駛汽車開發商對該技術的關注和投資很大,該技術的工作原理與雷達類似,但它使用的是激光產生的短脈沖光,而不是發射寬帶無線電波并探測反射信號。
然而,傳統的time-of-flight激光雷達存在許多缺點,使其難以在許多3D視覺應用中使用。因為這需要探測非常微弱的反射光信號,對于目前大部分的激光雷達系統的探測器,信號甚至很容易淹沒在環境光信號中。它的深度分辨率也很有限,在對高速公路或工廠車間等大片區域進行密集掃描,通常需要很長時間。為了應對這些挑戰,研究人員正轉向利用一種名為調頻連續波(FMCW)激光雷達的系統。
“FMCW激光雷達與OCT具有相同的工作原理,生物醫學工程領域自20世紀90年代初以來一直在發展OCT相關技術,”在杜克大學Michael J. Fitzpatrick生物醫學工程杰出教授Joseph Izatt實驗室工作的博士生Qian Ruobing說。“但30年前,沒有人知道自動駕駛汽車或機器人會得到快速發展,所以OCT技術僅被用于組織成像。現在,為了讓它在其他新興領域發揮更大的作用,我們需要利用它超高的分辨率來獲得更大的距離和速度。”
在3月29日發表在《Nature Communication》上的一篇論文中,杜克大學的團隊展示了相關研究,他們在對OCT研究中學習到的一些方法,可以將之前的FMCW激光雷達數據吞吐量提高25倍,同時仍能實現亞毫米深度精度。
OCT是一種光學模擬超聲波,它的工作原理是將聲波發送到物體上,然后測量它們返回的時間。為了計算光波的返回時間,OCT設備測量了它們的相位與相同的光波相比移動了多少,這些光波經過相同的距離,但沒有與另一個物體相互作用。
FMCW激光雷達采用了類似的方法,只是做了一些調整。 該技術發出的激光束在不同頻率之間不斷變換。 當探測器收集光來測量其反射時間時,它可以區分特定的頻率模式和任何其他光源,這使得它可以在各種照明條件下高速工作。然后,它測量無阻礙光束下的任意相移,這是一種比目前的激光雷達系統更精確的確定距離的方法。
“看到我們幾十年來研究的生物細胞規模的成像技術可以轉化為大規模、實時的3D視覺技術,這是非常令人興奮的,”Izatt說。“這正是機器人安全地觀察人類并與人類互動所需要的能力,甚至在增強現實中,用實時3D視頻取代虛擬化身。”
之前使用激光雷達的大部分工作都依賴于旋轉鏡子來掃描被反射的激光。雖然這種方法很有效,但無論它使用的激光有多強,它從根本上受到機械反射鏡速度的限制。
杜克大學的研究人員使用的是一種衍射光柵,它的工作原理類似于棱鏡,可以將激光分解成彩虹般的頻率,當它們離開光源時就會散開。因為原始的激光仍然在快速地在一個頻率范圍內掃描,這意味著掃激光雷達光束的速度要比機械反射鏡的旋轉速度快得多。這使得系統能夠在不損失深度和定位精度的情況下快速覆蓋廣泛的掃描區域。
雖然OCT設備是用于測量e物體內部幾毫米深的微觀結構的,但機器人3D視覺系統只需要定位人體尺度物體的表面。為了實現這一目標,研究人員縮小了OCT使用的頻率范圍,只尋找從物體表面反射產生的峰值信號。這使系統的分辨率降低了一點,但成像范圍和速度比傳統的激光雷達要大得多。
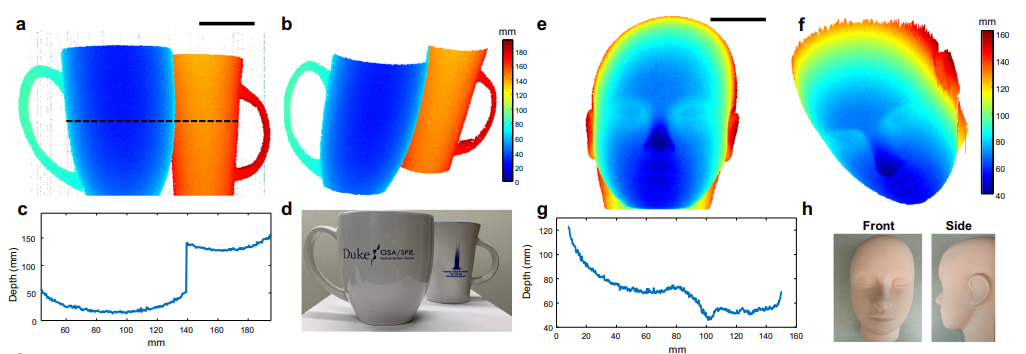
圖1:真實世界物體的視頻速率3D成像結果。a–d軸向間隔》9 cm的兩個陶瓷咖啡杯的成像結果;e–h人體頭部模型的成像結果
結果顯示,FMCW激光雷達系統實現了亞毫米定位精度,數據吞吐量比之前的演示提高了25倍。結果表明,該方法足夠快速和準確,可以實時捕捉到人體運動部位的細節,比如點頭或握緊的手。
lzatt說:“就像數碼相機已經無處不在一樣,我們的愿景是開發新一代基于激光雷達的3D相機,這種相機速度快,功能強大,能夠將3D視覺集成到各種產品中。”“我們周圍的世界是3D的,所以如果我們想讓機器人和其他自動化系統與我們自然而安全地互動,它們需要能夠看到我們,就像我們可以看到它們一樣。”
審核編輯 :李倩
-
機器人
+關注
關注
213文章
29734瀏覽量
212848 -
成像技術
+關注
關注
4文章
305瀏覽量
31844 -
激光雷達
+關注
關注
971文章
4235瀏覽量
192837
原文標題:視覺成像技術幫助機器人和汽車看得更清楚
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
EtherCAT科普系列(8):EtherCAT技術在機器視覺領域的應用

【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
機器人和自動化的未來(2)

“兩會”熱議“機器人和飛行汽車”,核心動力電機可能會火
紅外熱成像技術推動機器視覺向智能化、精準化發展
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
解決方案 3D 視覺機器人賦能汽車制造新征程

【「具身智能機器人系統」閱讀體驗】+初品的體驗
舵機技術深度解析,讓機器人更智能!
解鎖機器人視覺與人工智能的潛力,從“盲人機器”改造成有視覺能力的機器人(上)

適用于機器人視覺系統的LED光源







 工商網監
工商網監
評論