 機器人視覺抓取問題分析
機器人視覺抓取問題分析

最近視覺抓件系統一直會出現抓取零件不到位的問題.下面我將分析一下問題出現的原應.
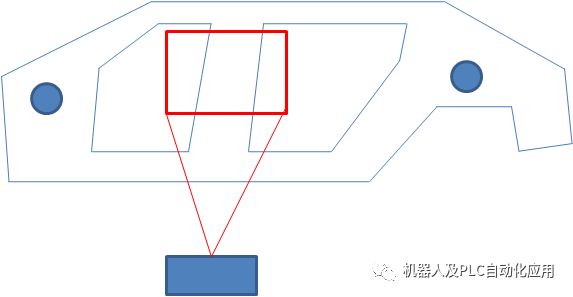
單相機測點,測量車身側圍外板B /內板B,計算出的車身整體偏差值是B柱的旋轉和變化量.因此對于車身整體的變化量存在偏差.零件大的組裝件容易出現這種問題.因此要區分對待側圍內板和側圍外部的抓取視覺的計算方法.
1.車身側圍內板:
應設置兩個相機對應機器人抓手上的定位銷附近,計算兩個定位空的偏差值.由于機器人抓手是固定的所以,要計算出兩空的變化對應車身坐標系的整體變化值.這樣計算出的機器人BASE坐標系下的偏差值最準確,機器人的抓取效果最好。
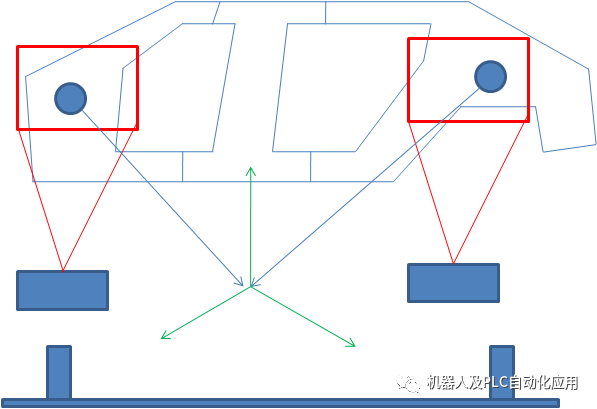
如果機器人抓手不使用定位銷定位,則可以使用一個相機的方法進行粗略抓取,問題會很少。
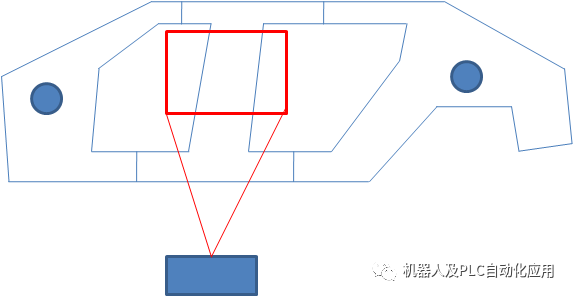
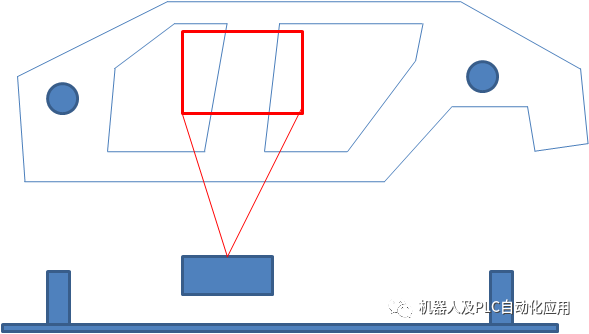
2.車身側圍外板:
側圍外板是一個整體件,用一個相機照車身B柱是沒有問題的.整體大件由于不需要搭接工藝,因此可以使用一個相機和定位銷定位抓取的方法.
--------------------END--------------------
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29737瀏覽量
212862 -
定位
+關注
關注
5文章
1443瀏覽量
35973
原文標題:機器人視覺抓取問題分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和
發表于 05-03 19:41
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
識別聯調。
進迭時空致力于為智能機器人提供完整全棧優化的RISC-V AI軟硬件解決方案,第一代RISC-V AI CPU芯片K1已完成AI視覺感知、AI語音處理、自動避障、路徑規劃、運動控制等
發表于 04-25 17:59
富唯智能最小復合機器人的強大抓取實力?
在工業自動化領域,復合機器人的身影愈發常見。但你是否好奇,最小的復合機器人能抓取多少多重?富唯智能以創新技術,給出了令人驚嘆的答案,徹底顛覆我們對小身形機器人的認知。?

復合機器人抓取精度的影響因素及提升策略
復合機器人結合了移動機器人(如AGV)和機械臂的功能,廣泛應用于物流、制造等領域。抓取精度是其核心性能指標之一,直接影響作業效率和產品質量。本文將探討復合機器人
破解透明物體抓取難題,地瓜機器人 CASIA 推出幾何和語義融合的單目抓取方案|ICRA 2025
近日,全球機器人領域頂會ICRA 2025(IEEE機器人與自動化國際會議)公布論文錄用結果,地瓜機器人主導研發的DOSOD開放詞匯目標檢測算法與MODEST單目透明物體抓取算法成功入
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
最近在閱讀《具身智能機器人系統》這本書的同時,還讀了 《計算機視覺之PyTorch數字圖像處理》一書,這兩本書完全可以視為是互為依托的姊妹篇。《計算機視覺之PyTorch數字圖像處理》是介紹
發表于 01-01 15:50
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
。
多模態融合的創新與突破
機器人控制技術的另一個重要突破在于多模態大模型的應用。相比于僅通過文字進行人機交互的傳統方法,現代機器人能夠融合視覺、聲音、定位等多模態輸入信息,為任務執行提供更加全面的感知
發表于 12-29 23:04
【「具身智能機器人系統」閱讀體驗】+初品的體驗
的快速發展,相關人才的需求也在不斷增加,通過閱讀該書可以幫助大家系統性地了解和分析當前具身智能機器人系統的發展現狀和前沿研究,為未來的研究和開發工作提供指導。此外,本書還可以為研究人員和工程師提供具體
發表于 12-20 19:17
解鎖機器人視覺與人工智能的潛力,從“盲人機器”改造成有視覺能力的機器人(上)
正如人類依賴眼睛和大腦來解讀世界,機器人也需要自己的視覺系統來有效運作。沒有視覺,機器人就如同蒙上雙眼的人類,僅能執行預編程的命令,容易碰撞障礙物,并犯下代價高昂的錯誤。這正是

智能移動機器人
富唯智能移動機器人分為復合機器人和轉運機器人,搭載ICD核心控制器,實現一體化控制,最快可實現15分鐘現場機器人的快速部署,無縫對接產線,配合自研2D/3D

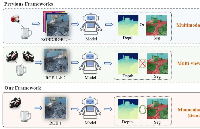
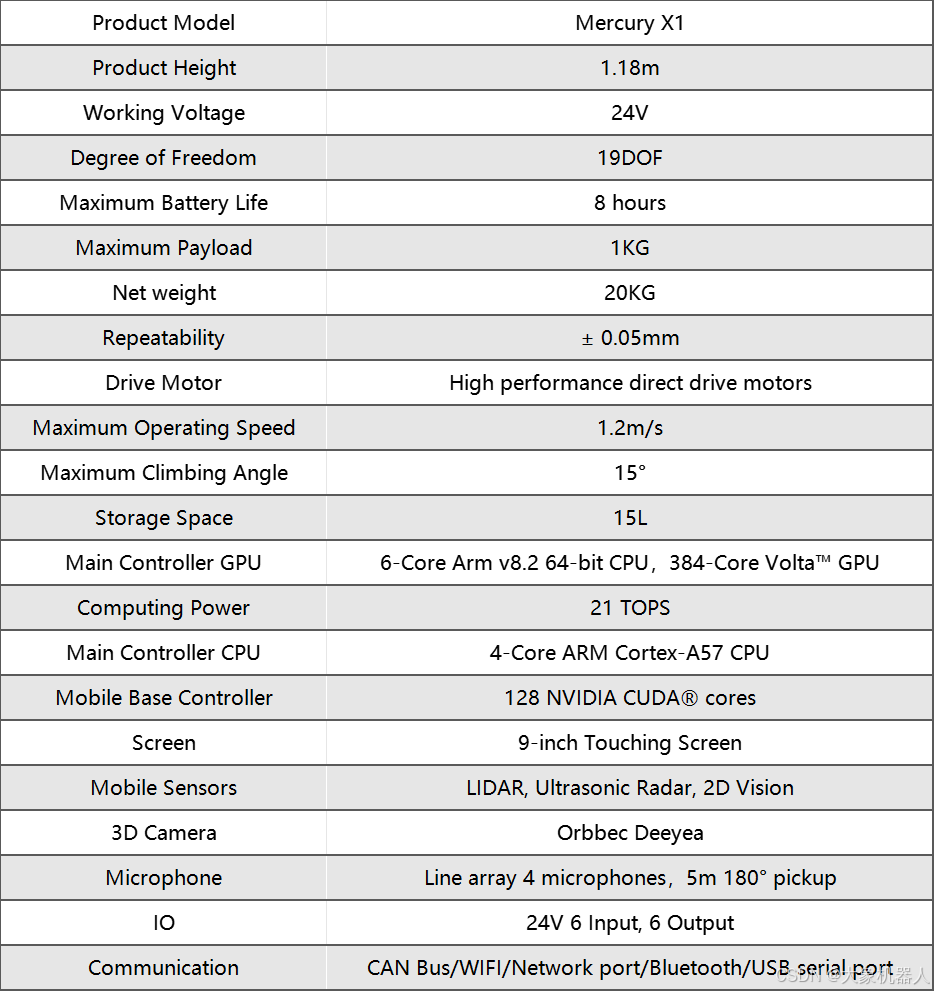
水星Mercury X1輪式人形機器人結合openc算法&STag標記碼視覺系統實現精確抓取!
本案例展示了如何利用視覺系統提升機械臂的抓取精度,成功實現了人形機器人的雙臂抓取不在局限于單臂抓取。 引言 如今市面上已經有了許多不同類型的





 工商網監
工商網監
評論