") XPLC系列運(yùn)動(dòng)控制器的功能及應(yīng)用場(chǎng)景
XPLC系列運(yùn)動(dòng)控制器的功能及應(yīng)用場(chǎng)景
XPLC006E功能簡(jiǎn)介
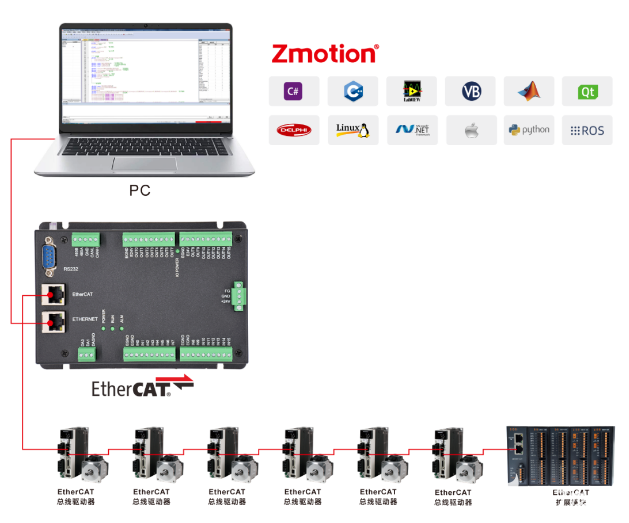
XPLC006E是正運(yùn)動(dòng)運(yùn)動(dòng)控制器推出的一款多軸經(jīng)濟(jì)型EtherCAT總線運(yùn)動(dòng)控制器,XPLC系列運(yùn)動(dòng)控制器可應(yīng)用于各種需要脫機(jī)或聯(lián)機(jī)運(yùn)行的場(chǎng)合。
XPLC006E自帶6個(gè)電機(jī)軸,最多12軸運(yùn)動(dòng)控制(含虛擬軸數(shù)),支持12軸直線插補(bǔ)、電子凸輪、電子齒輪、同步跟隨、虛擬軸設(shè)置等功能。
XPLC006E支持多任務(wù)同時(shí)運(yùn)行,同時(shí)可以在PC上直接仿真運(yùn)行,編程方式多種可選,支持ZDevelop軟件的Basic/PLC梯形圖/HMI組態(tài)和常用上位機(jī)軟件編程。
XPLC006E只支持EtherCAT總線軸,不支持脈沖軸和編碼器軸。采用EtherCAT總線與驅(qū)動(dòng)器通訊,1ms的刷新周期。
XPLC006E支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機(jī)API編程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
→此款產(chǎn)品有XPLC004E、XPLC006E、XPLC008E三個(gè)不同軸數(shù)的型號(hào)可選。
XPLC864E2功能簡(jiǎn)介
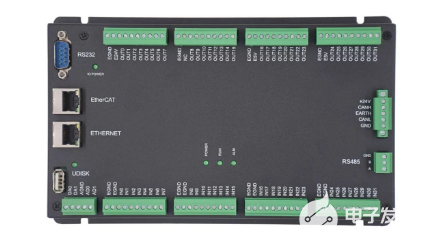
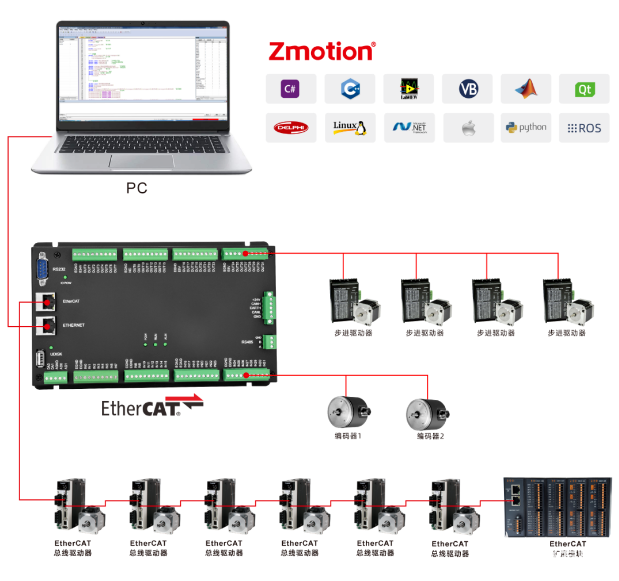
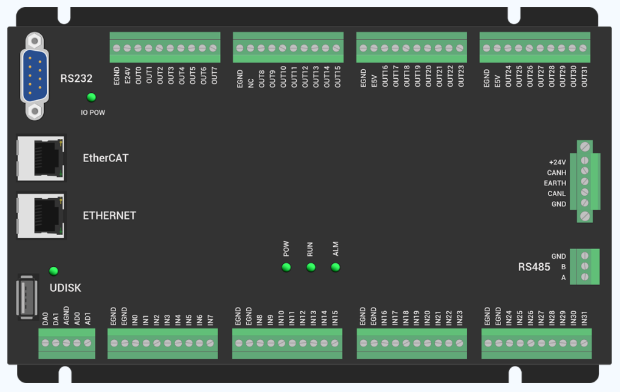
XPLC864E2在XPLC006E的功能基礎(chǔ)上做了升級(jí)(即上節(jié)介紹的XPLC006E的功能都支持),部分資源空間優(yōu)于XPLC006E,使用方法基本一致,不同之處在于XPLC864E2,硬件支持32點(diǎn)輸入、32點(diǎn)輸出、2個(gè)ADC、2個(gè)DAC,支持脈沖軸和總線軸混合使用,總實(shí)軸軸數(shù)為8,除了帶EtherCAT接口之外,輸出口硬件上可配置為8個(gè)軸的脈沖方向信號(hào)輸出,另帶兩路編碼器輸入,可由輸入口配置。
XPLC864E2支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機(jī)API編程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
一硬件參數(shù)說(shuō)明
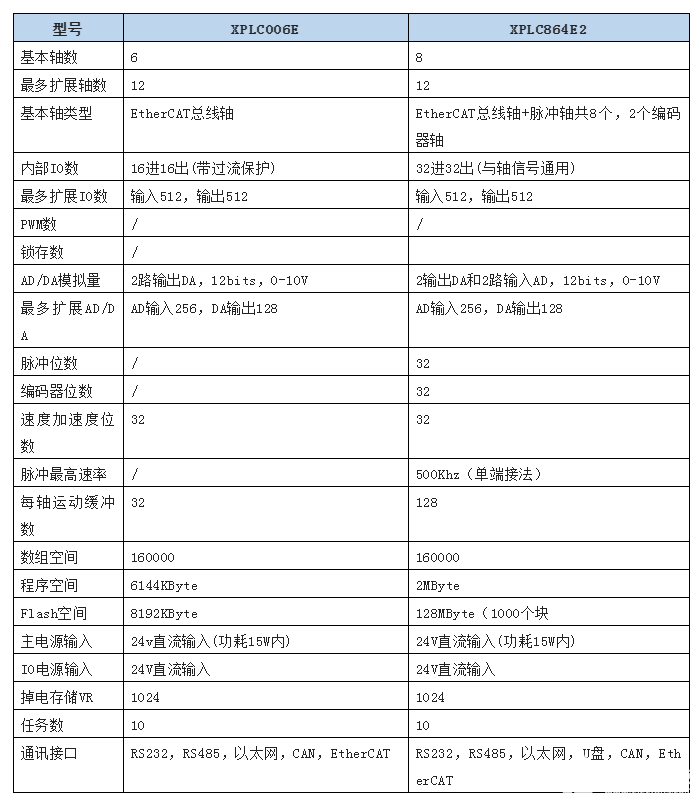
1. 基本參數(shù)
→注意XPLC系列控制器需要雙電源供電,即除了主電源之外,還需要一個(gè)IO電源給IO端子供電,否則IO無(wú)法操作,板載IO指示燈查看IO是否通電成功。
2. 控制器狀態(tài)查看
連接好控制器或仿真器后,通過(guò)“控制器”→“控制器狀態(tài)”查看當(dāng)前連接的控制器狀態(tài)。
“控制器狀態(tài)”能顯示出控制器狀態(tài)信息,包括控制器基本信息、ZCan節(jié)點(diǎn)狀態(tài)、槽位節(jié)點(diǎn)狀態(tài)、通訊配置。節(jié)點(diǎn)狀態(tài)能顯示連接的設(shè)備的軸數(shù)、起始IO編號(hào)等信息。
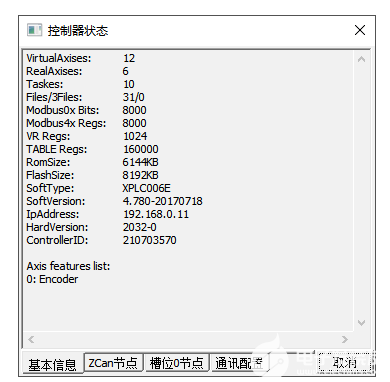
XPLC006E控制器狀態(tài)示例圖
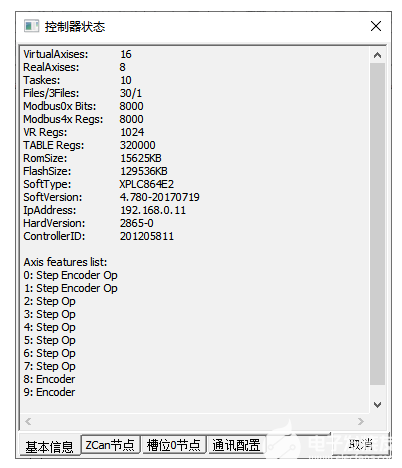
XPLC864E2控制器狀態(tài)示例圖
基本信息包含最大虛軸數(shù)、最大電機(jī)軸數(shù)、任務(wù)數(shù)、文件數(shù)量、各類寄存器空間大小、程序容量大小、存儲(chǔ)器大小、控制器的型號(hào)、軟件版本號(hào)與時(shí)間、IP地址、硬件版本號(hào),控制器硬件ID以及各軸上可配置的的類型及映射等。
A.控制器狀態(tài)基本信息
VirtualAxises:支持最大虛擬軸數(shù)RealAxises:支持最大電機(jī)軸數(shù)Taskes:最大任務(wù)數(shù)Files/3Files:最大文件/三次文件數(shù)Modbus0x Bits:Modbus位寄存器用戶可用空間大小Modbus4x Regs:Modbus字寄存器用戶可用空間大小VR Regs:VR寄存器用戶可用空間大小TABLE Regs:TABLE數(shù)組用戶可用空間大小RomSize:Rom容量FlashSize:Flash容量SoftType:軟件型號(hào)SoftVersion:系統(tǒng)軟件版本+固件版本IpAddress:控制器IP地址HardVersion:硬件版本ControllerID:控制器唯一IDAxis features list:軸類型列表
B.ZCan節(jié)點(diǎn)信息
連接擴(kuò)展模塊之后,可在此窗口查看CAN總線上的所有節(jié)點(diǎn)信息。
(CAN總線使用可查看小組手往期文章,有詳細(xì)說(shuō)明)
C.槽位0節(jié)點(diǎn)信息
使用EtherCAT總線連接其他設(shè)備之后,例如驅(qū)動(dòng)器或擴(kuò)展模塊,可在此窗口查看EtherCAT總線上的所有節(jié)點(diǎn)信息。
(EtherCAT總線使用可查看小組手往期文章,有詳細(xì)說(shuō)明)
D.控制器通訊配置
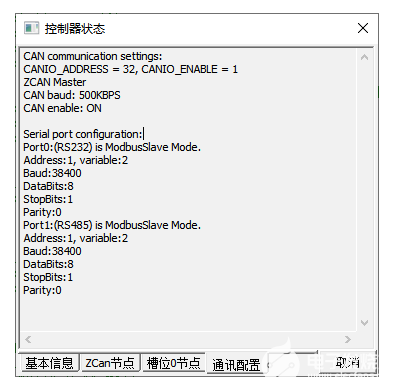
E.通訊設(shè)置顯示內(nèi)容如下
此時(shí)CAN通訊的設(shè)置:CANIO_ADDRESS = 32,CANIO_ENABLE=1結(jié)合CANIO_ADDRESS與CANIO_ENABLE的信息可以知曉,此時(shí)控制器是ZCAN Master主站模式,CAN總線通訊速率500kbps,CAN使能狀態(tài)。如需修改CAN通訊的設(shè)置,修改CANIO_ADDRESS與CANIO_ENABLE相關(guān)參數(shù)即可。Port0為RS232,ModbusSlave狀態(tài),地址1,VR與MODBUS寄存器是兩片獨(dú)立區(qū)間。Port1為RS485,ModbusSlave狀態(tài),地址1,VR與MODBUS寄存器是兩片獨(dú)立區(qū)間。更詳細(xì)的解釋請(qǐng)查看SETCOM指令相關(guān)的參數(shù)說(shuō)明。
3. 硬件參數(shù)查詢
控制器狀態(tài)窗口能直接看到常用參數(shù),在線命令輸入?*max能查看全部硬件參數(shù),以下以XPLC006E為例,其他型號(hào)查詢方法與其一致。
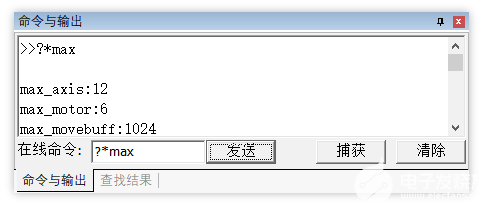
max_axis:12 所有軸的最大軸數(shù)
max_motor:6 可控的最大電機(jī)軸數(shù)
max_movebuff: 1024 每個(gè)軸或者軸組的最大運(yùn)動(dòng)緩沖
max_in:16,528 控制器自帶IN輸入個(gè)數(shù),最多支持IN輸入個(gè)數(shù)
max_out:16,528控制器自帶OUT輸出個(gè)數(shù),最多支持OUT輸出個(gè)數(shù)
max_ain:0,128 控制器自帶模擬量輸入個(gè)數(shù),最多支持模擬量輸入個(gè)數(shù)
max_aout:2,64 控制器自帶模擬量輸出個(gè)數(shù),最多支持模擬量輸出個(gè)數(shù)
max_pwm:0 PWM輸出個(gè)數(shù)
max_slot:1 總線個(gè)數(shù)
max_comport:2 串口個(gè)數(shù)
max_ethport:3 與PC、API函數(shù)的網(wǎng)口通訊連接
max_ethcustom:2 自定義網(wǎng)口通訊的連接
max_ethiport:1 正運(yùn)動(dòng)控制器互聯(lián)互通的網(wǎng)口通訊連接
max_flashnum:128 FLASH塊數(shù)
max_flashsize:16384 每個(gè)FLASH空間大小
max_pswitch:32 軟件位置比較輸出的最多個(gè)數(shù)
max_file:31 系統(tǒng)最多支持的文件數(shù)
max_3file:0 系統(tǒng)最多支持的三次文件數(shù)
max_task:10 任務(wù)數(shù)
max_timer:256 定時(shí)器個(gè)數(shù)
max_loopnest:8 內(nèi)部循環(huán)或者選擇的次數(shù)
max_callstack:8 子程序調(diào)用的堆棧層數(shù)
max_local of one sub:16 SUB的局部變量數(shù)
max_vr:1024 VR寄存器空間個(gè)數(shù)
max_table:160000 TABLE數(shù)組空間個(gè)數(shù)
max_modbusbit:8000 MODBUS_BIT位寄存器空間大小
max_modbusreg:8000 MODBUS_REG字寄存器空間大小
max_var:4096 最多支持變量個(gè)數(shù)(含全局變量與文件變量)
max_array:1024 最多支持?jǐn)?shù)組個(gè)數(shù)(含全局?jǐn)?shù)組與文件數(shù)組)
max_arrayspace:320000 所有數(shù)組總共的空間大小
max_sub:1500 最多支持SUB子程序的個(gè)數(shù)
max_edgescan:1024 最多可支持的上升沿/下降沿掃描個(gè)數(shù)
max_lablelength:17 數(shù)組與變量等自定義字符的最大長(zhǎng)度
max_hmi:2,x:1024 y:800 支持2個(gè)遠(yuǎn)端HMI,最大尺寸為1024*800
SERVO_PERIOD:1000 min:1000 max:4000 控制器周期
function support:Cam MultiMove 支持的運(yùn)動(dòng)控制功能
二編程方式
XPLC系列運(yùn)動(dòng)控制器需要用戶二次開(kāi)發(fā),開(kāi)發(fā)環(huán)境可分為兩類,一是使用正運(yùn)動(dòng)自主研發(fā)的ZDevelop編程軟件開(kāi)發(fā),二是使用常用的上位機(jī)軟件開(kāi)發(fā)。
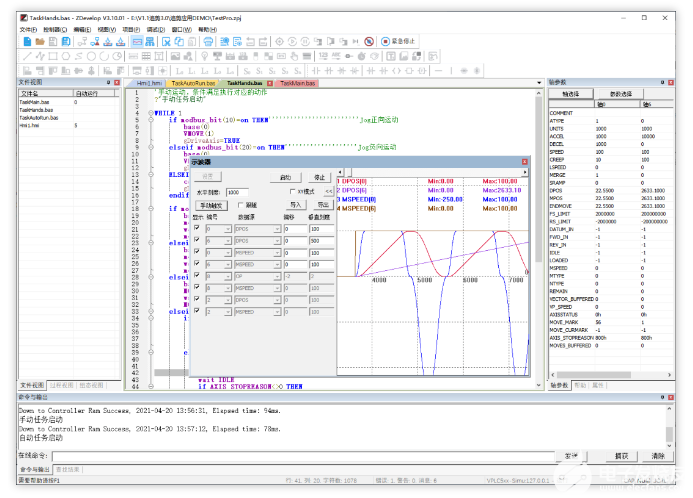
1. ZDevelop編程軟件
XPLC系列運(yùn)動(dòng)控制器支持使用ZDevelop編程軟件的三種編程語(yǔ)言,Basic/PLC梯形圖/HMI組態(tài),三種語(yǔ)言之間可以混合編程,互相調(diào)用,三種語(yǔ)言的編程手冊(cè)在ZDevelop菜單欄的“幫助”快速打開(kāi)文檔。使用ZDevelop編程軟件的優(yōu)勢(shì)是程序可以下載到控制器脫機(jī)運(yùn)行,節(jié)省上位機(jī)成本,同時(shí)ZDevelop提供仿真、調(diào)試、參數(shù)監(jiān)控等功能,輔助客戶開(kāi)發(fā),加快項(xiàng)目進(jìn)度。
2. 上位機(jī)軟件
控制器支持Windows,Linux,Mac,Android,WinCE各種操作系統(tǒng)下的開(kāi)發(fā),提供VC,C#,VB.net,LabVIEW等各種環(huán)境的dll庫(kù)。上位機(jī)軟件編程參考《ZMotion PC函數(shù)庫(kù)編程手冊(cè)》。
使用PC上位機(jī)軟件開(kāi)發(fā)的程序無(wú)法下載到控制器,通過(guò)dll動(dòng)態(tài)庫(kù)連接到控制器。
使用PC上位機(jī)編程方式時(shí),同時(shí)可以將控制器連上ZDevelop進(jìn)行監(jiān)控調(diào)試等操作。
三硬件接線
XPLC006E的系統(tǒng)架構(gòu)如下:
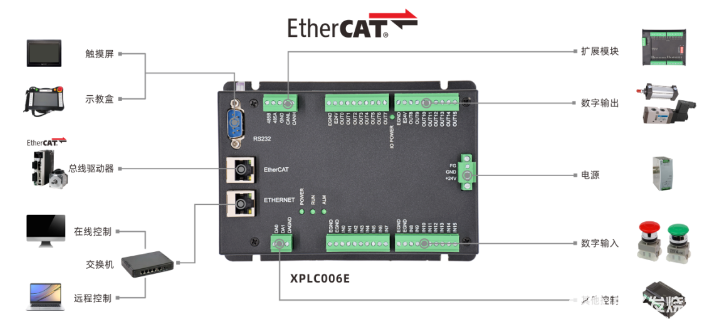

→只支持EtherCAT總線軸控制,脈沖軸控制建議選擇其他型號(hào)。
四控制器使用流程
第一步:硬件接線
參考控制器系統(tǒng)架構(gòu)圖,接入主電源(控制器采用24V直流電源供電)、驅(qū)動(dòng)設(shè)備、IO設(shè)備、觸摸屏、擴(kuò)展模塊等。
第二步:系統(tǒng)配置
設(shè)置伺服驅(qū)動(dòng)器的參數(shù),配置PC與控制器連接所需的串口或網(wǎng)口參數(shù)等。
第三步:連接控制器
采用串口或網(wǎng)口連接PC與控制器,建立通訊連接。
第四步:編程開(kāi)發(fā)
選擇一種開(kāi)發(fā)方式,ZDevelop編程軟件或上位機(jī)開(kāi)發(fā),參考對(duì)應(yīng)的編程手冊(cè)和例程,編輯程序。
第五步:程序調(diào)試
將程序下載到控制器調(diào)試程序功能,可連接ZDevelop觀察調(diào)試情況。沒(méi)有控制器的場(chǎng)合連接到仿真器調(diào)試。
第六步:運(yùn)行程序
運(yùn)行程序觀察效果,使用ZDevelop編程軟件可下載到控制器,使用其他上位機(jī)軟件開(kāi)發(fā)的程序通過(guò)動(dòng)態(tài)庫(kù)連接到控制器使用,控制器收到命令后執(zhí)行運(yùn)動(dòng)控制。
五應(yīng)用場(chǎng)景
XPLC系列運(yùn)動(dòng)控制器廣泛應(yīng)用與于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備、紡織服裝設(shè)備、醫(yī)療設(shè)備、流水線等應(yīng)用場(chǎng)合。
本次,正運(yùn)動(dòng)技術(shù)經(jīng)濟(jì)型EtherCAT運(yùn)動(dòng)控制器(一):功能簡(jiǎn)介與應(yīng)用場(chǎng)景,就分享到這里。
-
硬件
+關(guān)注
關(guān)注
11文章
3448瀏覽量
67061 -
總線
+關(guān)注
關(guān)注
10文章
2938瀏覽量
89198
發(fā)布評(píng)論請(qǐng)先 登錄

LabVIEW運(yùn)動(dòng)控制(一):EtherCAT運(yùn)動(dòng)控制器的SCARA機(jī)械手應(yīng)用 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器
?智能空調(diào)控制器的應(yīng)用場(chǎng)景與深遠(yuǎn)意義?
嵌入式學(xué)習(xí)-飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器使用場(chǎng)景
飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器使用場(chǎng)景
EtherCAT運(yùn)動(dòng)控制器在SCARA和碼垛機(jī)械手中的應(yīng)用
PLC能取代運(yùn)動(dòng)控制器嗎
運(yùn)動(dòng)控制器的種類和特點(diǎn)
運(yùn)動(dòng)控制器的控制形式有哪些
運(yùn)動(dòng)控制器的主要功能是什么?
EtherCAT運(yùn)動(dòng)控制器與PLC的區(qū)別
什么是EtherCAT運(yùn)動(dòng)控制器?它有哪些特點(diǎn)?
運(yùn)動(dòng)控制器與plc編程一樣嗎
運(yùn)動(dòng)控制器與PLC有什么區(qū)別
工業(yè)網(wǎng)關(guān)的功能及應(yīng)用場(chǎng)景解析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論