 常見目標檢測算法大匯總
常見目標檢測算法大匯總
第1章 目標檢測概述
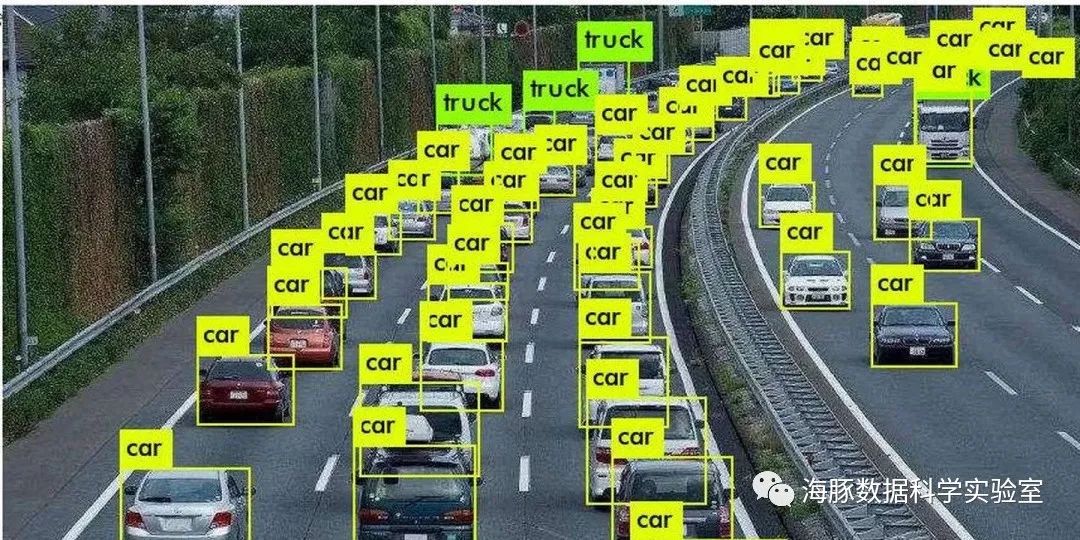
目標檢測是對圖像分類任務的進一步加深,他不僅要識別出圖片中各種類別的目標,還要把他們的位置找出來用矩形框框住。
在實際操作中,通常先找出目標的位置(通過坐標軸方框標注出來),然后在對標注的目標進行分類。
目標檢測是深度學習在計算機視覺領域一個非常重要的應用,從本節開始,我們將陸續開始目標檢測的學習。
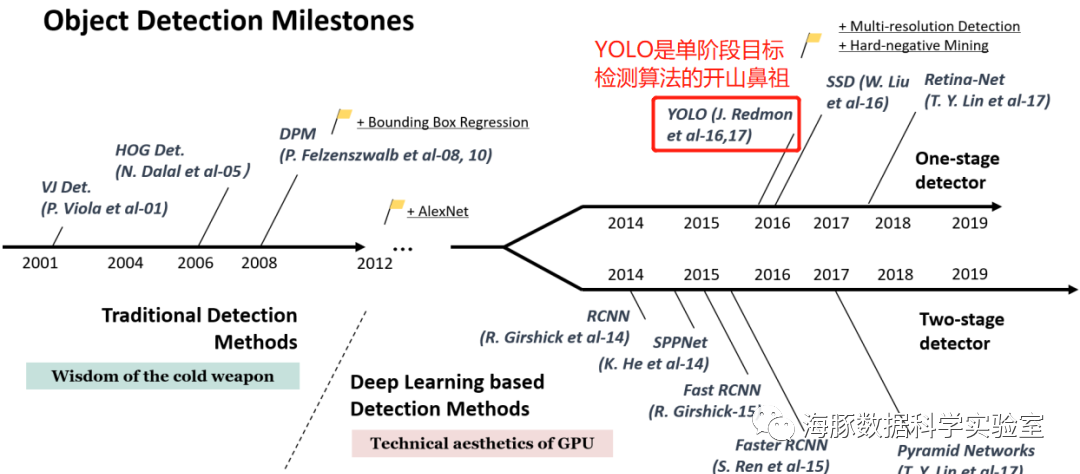
根據算法的流程可以將目標檢測算法分為兩種流派:
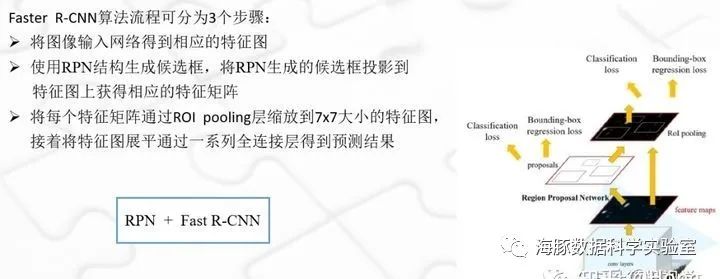
(1)以Faster R-CNN為代表的Two-Stage算法:
它檢測目標主要分為兩個部分
通過專門模塊去生成候選框
尋找前景以及調整邊界框
(2)以SSD、YOLO為代表的One-Stage算法
它是直接基于anchor直接進行分類以及調整邊界框。
這兩種方式各有各的特別,Two-Stage很明顯檢測的精度要高一點,但是檢測速度慢;
One-Stage放棄了高精度,但是換來了速度,速度比Two-Stage算法快很多。
接下來簡單介紹幾種常用的目標檢測算法
第2章 常見的Two-Stage算法
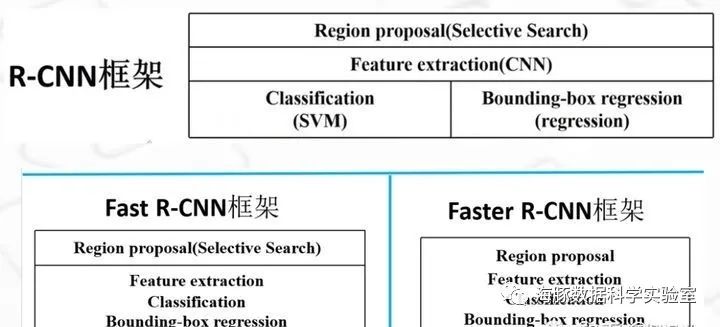
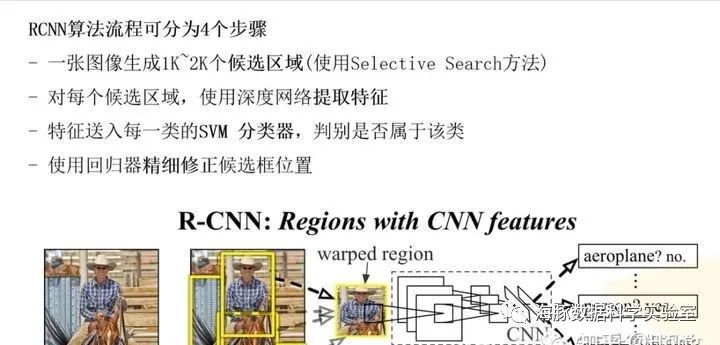
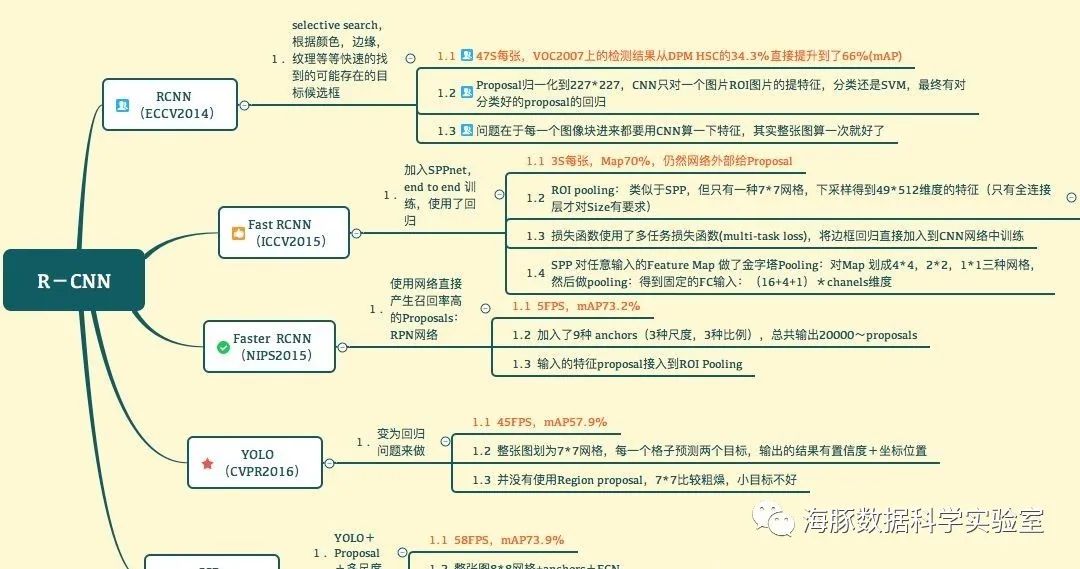
2.1 R-CNN
在過去的十多年時間里,傳統的機器視覺領域,通常采用特征描述子來應對目標識別任務,這些特征描述子最常見的就是 SIFT 和 HOG.而 OpenCV 有現成的 API 可供大家實現相關的操作。
R-CNN(Region with CNN Feature)2014年提出,在此之前都是傳統的目標檢測算法,人為定義特征進行檢測,進入了瓶頸期,進步緩慢,但是R-CNN出來之后將目標檢測領域的準確率至少提高了30%。

2012 年 Krizhevsky 等人在 ImageNet 舉辦的 ILSVRC 目標識別挑戰大賽中一戰成名,豪奪當年的第一名,Top5 錯誤率 15%,而他們團隊提出來的網絡結構以第一作者 Alex Krizhevsky 名字命名,它就是 AlexNet
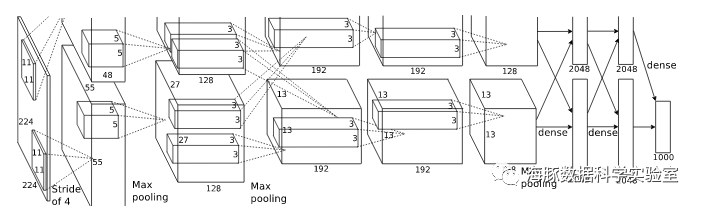
因為 AlexNet 的出現,世人的目標識別的目光重回神經網絡領域,以此為契機,不斷涌出各種各樣的網絡比如 VGG、GoogleNet、ResNet 等等。
受 AlexNet 啟發,R-CNN論文作者嘗試將 AlexNet 在 ImageNet 目標識別的能力泛化到 PASCAL VOC 目標檢測上面來。
R-CNN 借鑒了滑動窗口思想,采用對區域進行識別的方案

第3章 常見的One-Stage算法
3.1 SSD
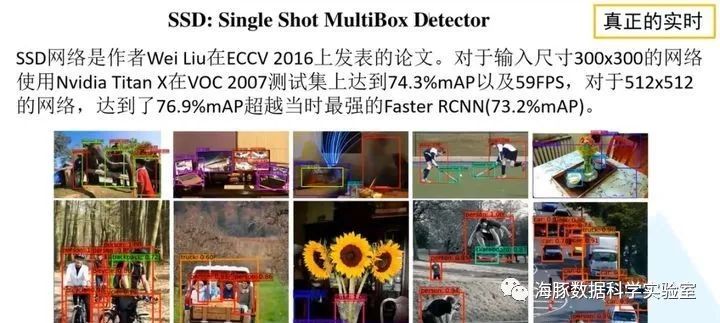
SSD是一種經典的One-Stage算法,它解決當時Faster R-CNN對小目標檢測效果差和檢測速度慢的問題。
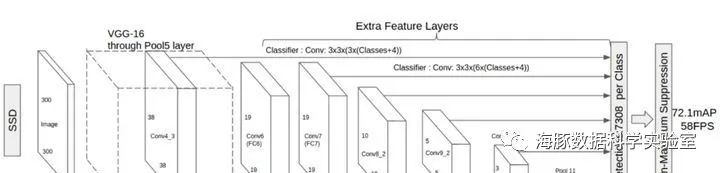
SSD可以預測不用尺度的目標,它的網絡有6個輸出特征層。
使用Faster R-CNN在單GPU上大概每秒6、7張圖片;
而使用SSD算法,同樣在單GPU上它每秒能檢測50 、60 張圖片;
但相比之前使用了FPN的Faster R-CNN而言呢,SSD算法的檢測精度要差很多。
3.2 YOLO
YOLO系列算法是目前使用最多的目標檢測算法,它最大的特點就是檢測速度快,而且現在檢測精度也就是mAP也變高了,所以稱為時下最熱門的目標檢測算法。
YOLO是在CVPR2016提出的一種目標檢測算法,它一共有5個版本,YOLO v1到v3是同一個作者Joseph設計的,包括論文到算法結構,YOLO v4到v5是其他作者設計的,目前檢測效果最好和使用最多的就是YOLO v5。
其核心思想是將目標檢測轉化為回歸問題求解,并基于一個單獨的end-to-end網絡:完成從原始圖像的輸入到物體位置和類別的輸出。
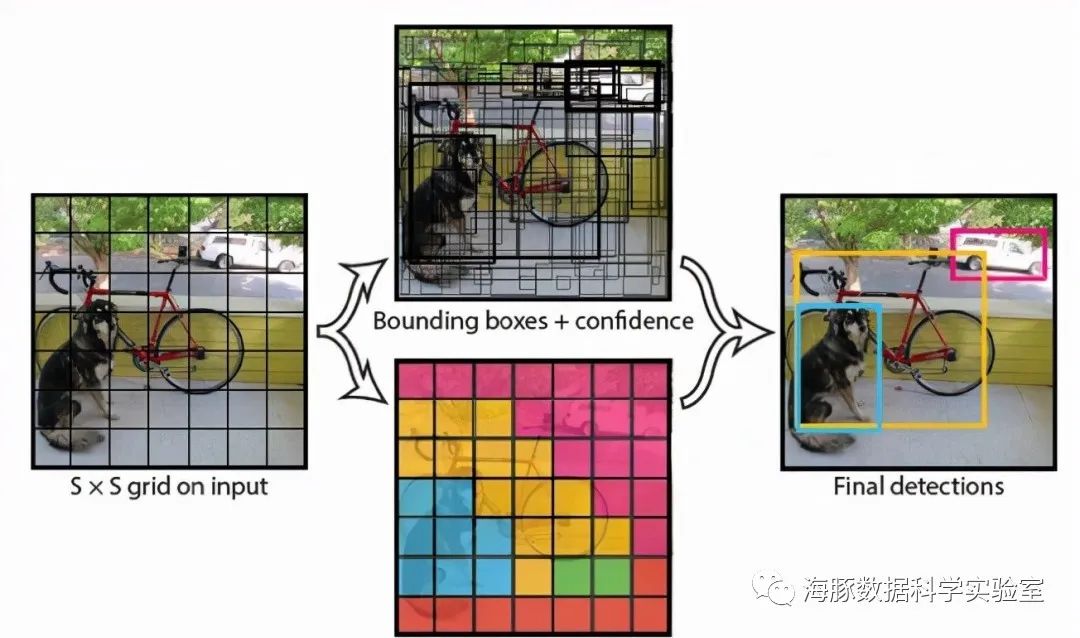

YOLO在進行預測時,會對圖像進行全面地推理。
它一種統一的目標檢測模型。我們的模型構建簡單,可以直接在整張圖像上進行訓練。
第4章 匯總比較
4.1 匯總比較
審核編輯 :李倩
-
算法
+關注
關注
23文章
4701瀏覽量
94876 -
圖像分類
+關注
關注
0文章
96瀏覽量
12118 -
目標檢測
+關注
關注
0文章
223瀏覽量
15921
原文標題:目標檢測 - 常見目標檢測算法大匯總
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于RK3576開發板的車輛檢測算法
基于RK3576開發板的安全帽檢測算法
基于RV1126開發板的車輛檢測算法開發
基于RV1126開發板的安全帽檢測算法開發
軒轅智駕紅外目標檢測算法在汽車領域的應用
睿創微納推出新一代目標檢測算法
在樹莓派上部署YOLOv5進行動物目標檢測的完整流程

旗晟機器人環境檢測算法有哪些?
慧視小目標識別算法 解決目標檢測中的老大難問題

opencv圖像識別有什么算法
口罩佩戴檢測算法

人員跌倒識別檢測算法

安全帽佩戴檢測算法






 工商網監
工商網監
評論