 DIY一個太陽能檢測器
DIY一個太陽能檢測器

該項目為太陽能跟蹤器提供了一個開放的硬件/軟件測試臺。
所提出的原型基于由ArduinoUno控制的雙軸太陽能跟蹤器,ArduinoUno是一個基于易于使用的硬件和軟件的開源原型設計平臺。
太陽能跟蹤器可以在LightDependentResistor(LDR)傳感器的幫助下自動控制,也可以使用電位計手動控制。此外,該測試臺還提供基于Excel的虛擬儀器,可以記錄和呈現太陽能跟蹤器數據。所使用的硬件被選擇為便宜、緊湊和通用的。提議的測試臺旨在幫助學生加深對控制理論及其應用的理解。
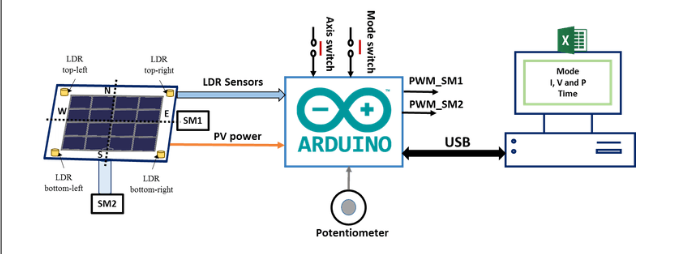
建議的測試臺如圖1所示。它基于一個太陽能跟蹤器,該跟蹤器可以借助四個LDR傳感器和兩個伺服電機(SM1和SM2)自動旋轉以跟蹤太陽,或使用電位計手動跟蹤。
要在兩種模式(自動和手動)之間切換,使用按鈕。另一個按鈕用于將SM1(上下伺服電機)或SM2(左右伺服電機)連接到電位計以控制它們的運動。此外,使用計算機作為虛擬儀器,在MSExcel中根據時間將光伏板的模式和電流、電壓和功率可視化。ArduinoUno板用于實現系統的所有軟件要求。
機械設計
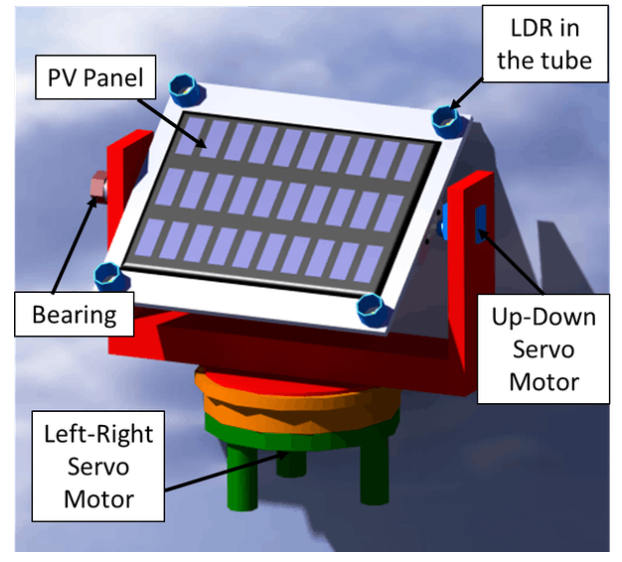
如圖2所示,太陽能跟蹤器的計算機輔助設計(CAD)3D模型是在CATIA中設計的。它由光伏板、左右上下伺服電機、四個LDR傳感器組成。對于水平軸,軸承與上下伺服電機平行固定,具有更好的靈活性。太陽跟蹤器設計有兩個自由度,從東到西由左右伺服電機和從南到北由上下伺服電機。LDR傳感器放置在光伏面板的四個角上,并放置在頂部帶有小孔的暗管中,以檢測太陽的照度。這些暗管也被認為是輻射集中器,用于提高太陽能跟蹤器的穩健性。
硬件系統
圖3展示了所提出的測試平臺的電子電路。對于自動模式,微控制器將LDR傳感器(引腳A0至A3)的模擬值轉換為數字。然后,它使用兩個脈沖寬度調制(PWM)信號(引腳5和6)控制兩個伺服電機(上下和左右)來跟蹤太陽。旋轉運動發生在兩個軸上,根據每日太陽路徑的方位角從東到西,根據季節太陽的路徑從南到北高度。對于手動模式,電位器(引腳A4)用于控制兩個伺服電機的運動,一個按鈕(引腳11)用于將電位器連接到上下伺服電機或左右伺服電機。此外,另一個按鈕(引腳12)用于在兩種模式之間切換。此外,PV電壓通過Arduino的模擬引腳A5測量,然后計算PV電流,因為負載的電阻是已知的。接下來,PV電流、電壓和功率與時間的關系以及實際模式被發送到計算機,在MSExcel上實時呈現。
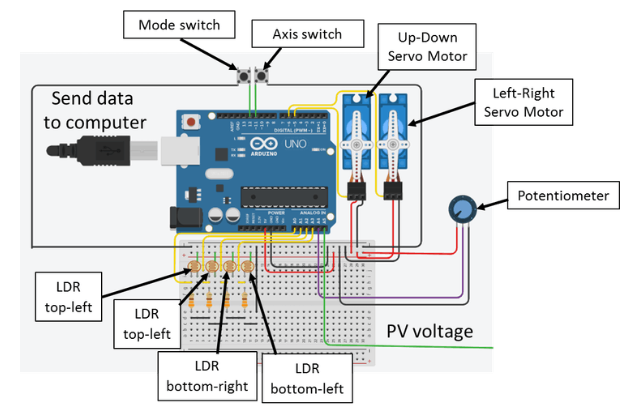
LDR傳感器電路設計為分壓器電路。光強的變化與分壓器輸出電壓的變化成正比。分壓器的頂部為5V,地為0V,分壓器的輸出連接到微控制器的模擬輸入(例如A0)。隨后,單片機的模數轉換器(ADC)將A0讀取的模擬值轉換為0到1023之間的數字值,因為ADC是用10位編碼的,根據這個值可以知道光的水平。分壓器中使用的電阻值為330Ω。
使用兩個180度伺服電機。一個伺服電機(MG996R)根據垂直軸控制太陽能跟蹤器,即左右伺服電機。還有一個微型伺服電機(SG90)根據水平軸控制太陽能跟蹤器,即上下伺服電機。伺服電機的優點是我們可以使用直接連接到微控制器輸出的單根低電流線來控制它的停止、運行、旋轉方向和速度,而無需任何驅動器。使用的伺服電機由ArduinoUNO板通過3線電纜控制,如圖3所示,兩根線用于供電,一根線用于PWM控制其位置。
嵌入式軟件設計
嵌入式軟件是將嵌入硬件(ArduinoUno)中以控制和監控太陽能跟蹤器測試臺的部分。嵌入式軟件旨在滿足以下要求:
1、試驗臺有手動和自動兩種模式。一個按鈕連接到引腳12以在兩種模式之間切換。
2.手動模式下,電位器可以控制伺服電機,左右電機由東向西,上下電機由南向北控制。一個按鈕連接到引腳11以在兩個電機之間切換電位器,它控制左右伺服電機或上下伺服電機。
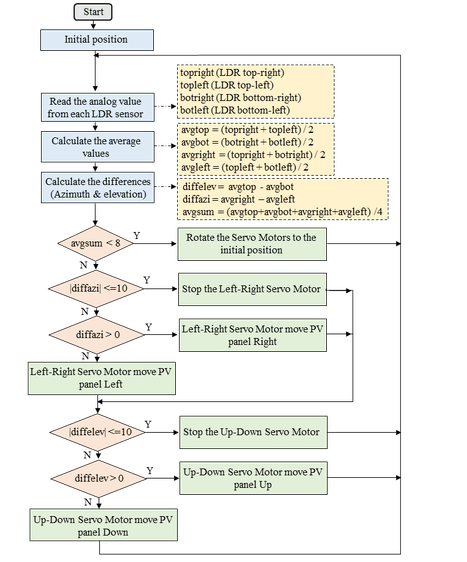
3.如果自動模式處于活動狀態,則將執行圖4所示的算法。后者使用LDR傳感器返回的模擬值。例如,考慮方位角或垂直軸,比較兩個右側LDR和兩個左側LDR的平均值,如果左側LDR接收到更多的光,太陽跟蹤器將通過左右伺服電機沿該方向移動。后者將繼續旋轉,直到差異結果在[-10,10]范圍內。該范圍用于穩定控制器,一旦太陽能跟蹤器垂直于太陽,則不再進行進一步控制。另一方面,如果右側的LDR接收到更多的光,則太陽跟蹤器通過左右伺服電機沿該方向移動,并將繼續旋轉,直到差異結果在[-10,10]范圍內。相同的方式用于高程軸。此外,我們還確定了四個LDR傳感器之間的平均輻射,以及該值是否小于一個小值(8:經過實際調整和測試的值,當輻射為零時返回)。也就是說,夜幕降臨了。在這種情況下,太陽跟蹤器必須回到太陽升起的位置。例如,如果將左右伺服電機設置為0度,將上下伺服電機設置為30度,即可到達太陽升起位置。這可以通過C函數“servox.write(angle)”由ArduinoIDE提供。一個經過實際調整和測試的值,當輻照為空時返回)。也就是說,夜幕降臨了。在這種情況下,太陽跟蹤器必須回到太陽升起的位置。例如,如果將左右伺服電機設置為0度,將上下伺服電機設置為30度,即可到達太陽升起位置。這可以通過C函數“servox.write(angle)”由ArduinoIDE提供。一個經過實際調整和測試的值,當輻照為空時返回)。也就是說,夜幕降臨了。在這種情況下,太陽跟蹤器必須回到太陽升起的位置。例如,如果將左右伺服電機設置為0度,將上下伺服電機設置為30度,即可到達太陽升起位置。這可以通過C函數“servox.write(angle)”由ArduinoIDE提供。
4.通過模擬引腳A5獲取的PV電壓必須經過處理并用于計算PV電流和功率。然后所有這些數據和實際模式必須通過USB電纜發送到計算機,然后在MSExcel中呈現。
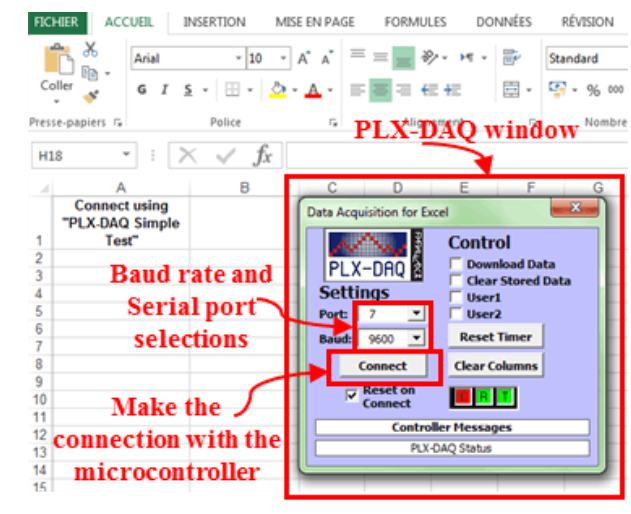
PLX-DAQExcel宏用于數據采集從所述微控制器的Arduino到Excel電子表格。我們只需要下載它。安裝后,PC上會自動創建一個名為“PLX-DAQ”的文件夾,其中有一個名為“PLX-DAQSpreadsheet”的快捷方式。然后,要在開發板和Excel之間建立通信,我們只需要打開電子表格并在PLX-DAQ窗口中定義連接設置(波特率和端口)(圖5)。此后,點擊“連接”后,輸出數據將被收集并實時顯示在Excel電子表格上
原型
圖6顯示了處于分離和組裝狀態的太陽能跟蹤器。如前所述,整個結構是使用木板制造的,很明顯,所有提到的組件都已用于構建具有手動和自動模式的太陽能跟蹤器(LDR傳感器、ArduinoUno、伺服電機、電位計、按鈕和小型光伏板)。

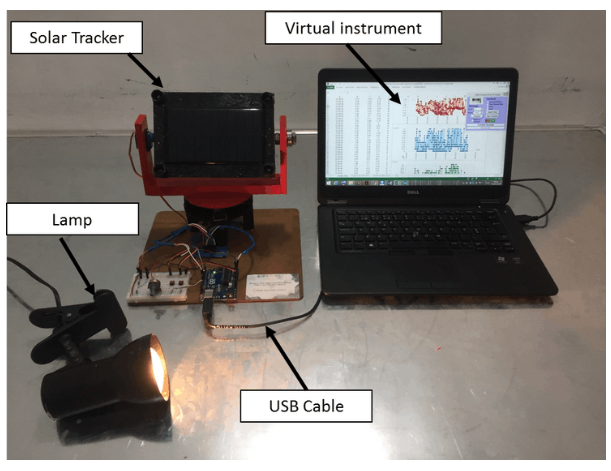
圖7顯示了整個測試臺、帶有虛擬儀器的太陽能跟蹤器,以及可以暴露光線以測試太陽能跟蹤器的人造燈。太陽能跟蹤器和計算機通過USB數據線連接。一旦獲得PV電壓,控制器就會處理此信息并使用它來計算PV電流和功率。然后,所有這些數據都被發送到計算機以在MSExcel中呈現。從無花果。從圖5和圖6可以看出,所建議的測試臺體積小、靈活且易于使用。它可以讓學生、研究人員和工程師在實施大型太陽能跟蹤設備之前以簡單的方式應用他們的算法。
-
太陽能
+關注
關注
37文章
3530瀏覽量
116134 -
檢測器
+關注
關注
1文章
894瀏覽量
48685 -
Arduino
+關注
關注
190文章
6498瀏覽量
192154 -
LDR
+關注
關注
0文章
100瀏覽量
7895
發布評論請先 登錄
做一個樹莓派太陽能電池
設計一個太陽能燈套件的教程
太陽能小風扇DIY設計

簡單自制太陽能充電器 DIY制作教程


DIY太陽能追蹤器 智能移動太陽能板
DIY太陽能18650充電器以及太陽能應急燈





 工商網監
工商網監
評論