 通過藍牙實現交通攝像頭中的CAN通訊
通過藍牙實現交通攝像頭中的CAN通訊

車輛在行駛過程中會被很多規則左右,而且隨著科技的發展,道路上的行駛規范不再能夠完全通過人力來維護。現在,交通攝像頭已被證明是一種非常有效的降低車速和減少交通違規行為的方法。我們可能不喜歡它們,但不能說它們沒有效果。道路上很多攝像頭都可以準確地監視車輛的違規情況。全球最大的交通執法設備供應商Sensys Gatso集團是交通攝像頭的領先制造商,并不斷使用創新的技術來改進系統。
香港市中心的交通監管系統
在全球,Sensys Gatso集團的交通監控攝像機和系統被廣泛用于監控速度、紅燈和其他交通情況。他們的客戶來自不同的國家和城市,要求也都千差萬別。在香港,Sensys Gatso的攝像頭被用來拍攝闖紅燈的車輛。按照要求應該拍攝汽車后部的照片,因為后部牌照更大,通常不那么臟,便于識別。因此,此系統需要兩個部分:一部分是安裝在交通燈上以檢測是否有車闖紅燈的雷達箱,以及后面50-60米遠的攝像機。
遇到的問題
該系統的兩部分:雷達箱和攝像頭需要同步,以便拍攝準確的違規車輛的照片。但是在香港的城市中心,想要挖一條長達60米的線纜非常昂貴且困難,因此,Sensys Gatso集團開始尋找無線解決方案。
Sensys Gatso的工程經理Enrico Damen解釋說:“我們先開始進行市場調查,尋找可以在基于CAN的雷達盒和攝像機之間提供穩定連接的無線解決方案。
我們很快就找到了四種不同的解決方案,并決定在我們的測試實驗室進行測試。”Sensys Gatso對信號強度、可靠性和范圍進行了廣泛的測試,測試結果指出Ixxat CANblue II是最佳方案。
對于測試結果,Enrico Damen解釋說:“主要是長距離連接的穩定性讓我們印象深刻,CANblue II是唯一的能夠處理我們需要的長達60米的無線解決方案。事實上,我們的測試表明,它可以覆蓋到400米。”
雷達盒位于交通燈處,可以檢測到車輛是否越過了交通燈處的白色停車線。如果車輛過線,雷達盒就會向攝像機發送信號,告訴它該拍照了。該信號通過雷達盒和攝像機內的兩個Ixxat CANblue II即刻發送。
在這個項目中,Ixxat的CAN專家還與Sensys Gatso和荷蘭本地嵌入式網絡專家Twincomm合作,以保證藍牙通信的安全性。這一點尤為重要,因為攝像頭在戶外,可能會被未經授權的人訪問。專家們一起調整了CANblue II的固件,以確保在任何時候都能阻止未經授權的訪問。
為終端客戶降低成本
有了Ixxat CANblue II作為他們解決方案的一部分,Sensys Gatso獲得了更有競爭力的產品。“收益主要與成本相關,”Enrico Damen說。“在地面埋設線纜非常昂貴,尤其是在城市地區,所以通過無線藍牙通信,我們可以提供一個更具成本效益的解決方案。”
審核編輯 :李倩
-
CAN
+關注
關注
57文章
2903瀏覽量
467193 -
藍牙
+關注
關注
116文章
6055瀏覽量
173556
原文標題:Ixxat產品案例——通過藍牙實現交通攝像頭中的CAN通訊
文章出處:【微信號:ilinki,微信公眾號:智匯工業】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
K230micropython下能實現同時用USB攝像頭和板載攝像頭YOLO識別并顯示在IDE上嗎?
基于RV1126開發板實現網絡攝像頭方案

AI視覺監控攝像頭需求強勢增長,挑選要注意這點

RT1176是否有任何驅動程序示例可以通過并行攝像頭接口與8/10/12位攝像頭通信?
線性霍爾元件DH643-D在攝像頭中的應用
車載攝像頭的EMC問題案例
車載攝像頭的EMC案例分享
積水自動監控攝像頭

CMOS在安防攝像頭中的應用

MS8828三相無刷電機驅動IC在智能監控攝像頭中的技術性應用
電動車亂停放識別攝像頭

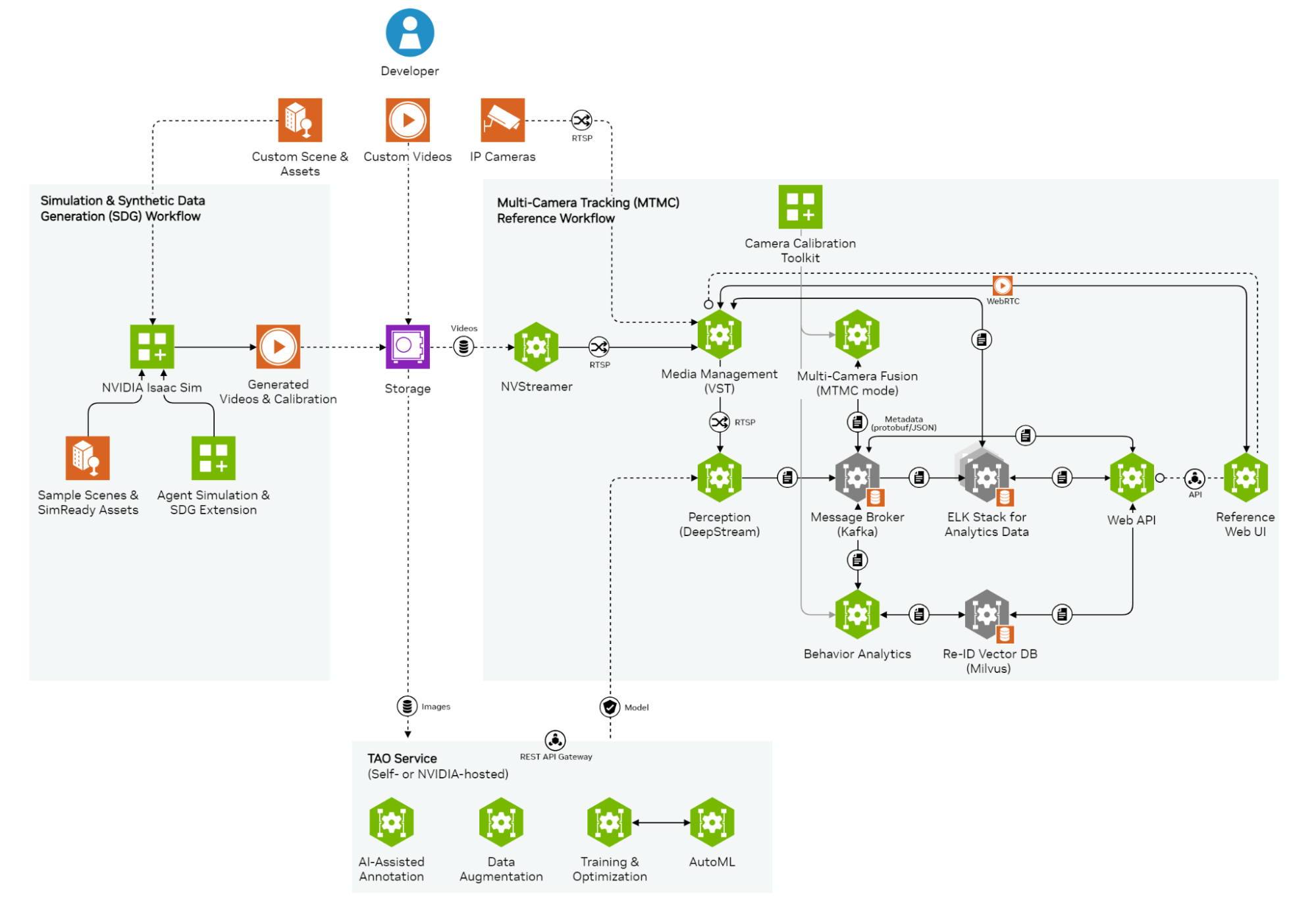
NVIDIA多攝像頭追蹤工作流的應用架構






 工商網監
工商網監
評論