") Realsense+大象機(jī)器人手眼標(biāo)定方案詳解
Realsense+大象機(jī)器人手眼標(biāo)定方案詳解
踩坑
手眼標(biāo)定的算法網(wǎng)上是比較多的,但是很多都不好用。github上高贊的easy_handeye,試了一下,但是mycobot600沒(méi)有提供moveit的配置,而我ROS基礎(chǔ)不是很好,不太會(huì)修改示例代碼。折騰了一段時(shí)間最終看到這個(gè)魚(yú)香ROS,最終得到了不錯(cuò)的結(jié)果
1.配置
配置過(guò)程就不用說(shuō)了,參考魚(yú)香ROS
用深度相機(jī)的話需要安裝深度相機(jī)的庫(kù)github
需要控制機(jī)械臂還需要安裝ROS庫(kù),參考博客
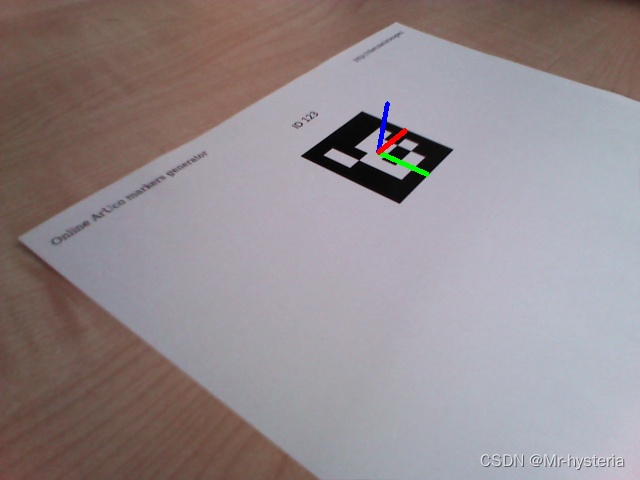
識(shí)別二維碼需要安裝aruco_ros
特別說(shuō)明一些,魚(yú)香ROS配置的時(shí)候,安裝的opencv應(yīng)該是pip3去安裝的。配置過(guò)程可能有許多問(wèn)題,百度解決即可
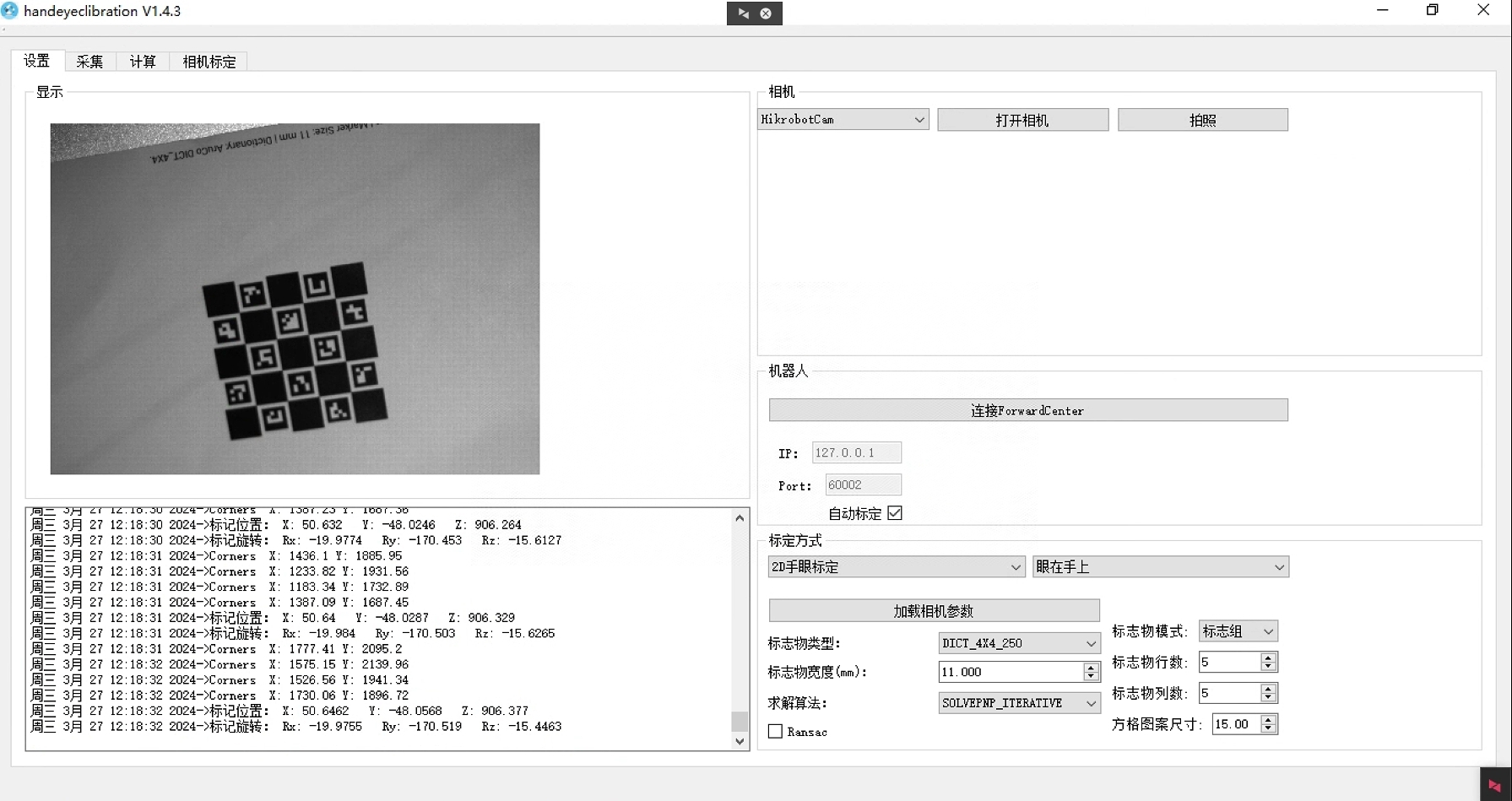
2.在線標(biāo)定
用在線標(biāo)定的方式比較簡(jiǎn)單,不用自己去配置姿態(tài)信息。
2.1啟動(dòng)相機(jī)
該launch文件已經(jīng)把啟動(dòng)realsense的代碼寫入了,直接運(yùn)行就好。
roslaunch handeye-calib aruco_start_realsense_sdk.launch
自己可以修改相機(jī)的參數(shù),比如分辨率,幀率
其中分辨率不是隨便改的,可以啟動(dòng)realsense-viewer查看相機(jī)支持的分辨率有哪些
realsense-viewer
2.2啟動(dòng)機(jī)械臂及通信
# 啟動(dòng)rviz
roslaunch mycobot_600 mycobot_600_slider.launch
# 啟動(dòng)通訊
rosrun mycobot_600 slider_600.py
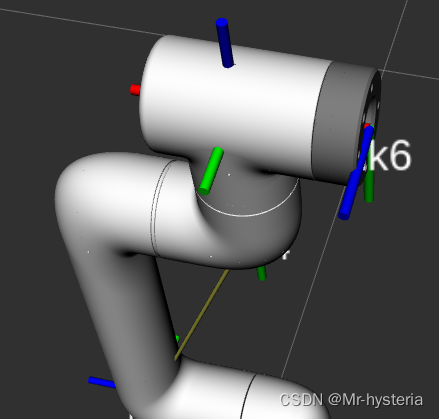
Rviz中的坐標(biāo),可以看出,基底坐標(biāo)是base,末端坐標(biāo)是link6

2.3啟動(dòng)手眼標(biāo)定程序
修改src/handeye-calib/launch/online/online_hand_on_eye_calib.launch中的參數(shù)后,運(yùn)行:

roslaunch handeye-calib online_hand_on_eye_calib.launch
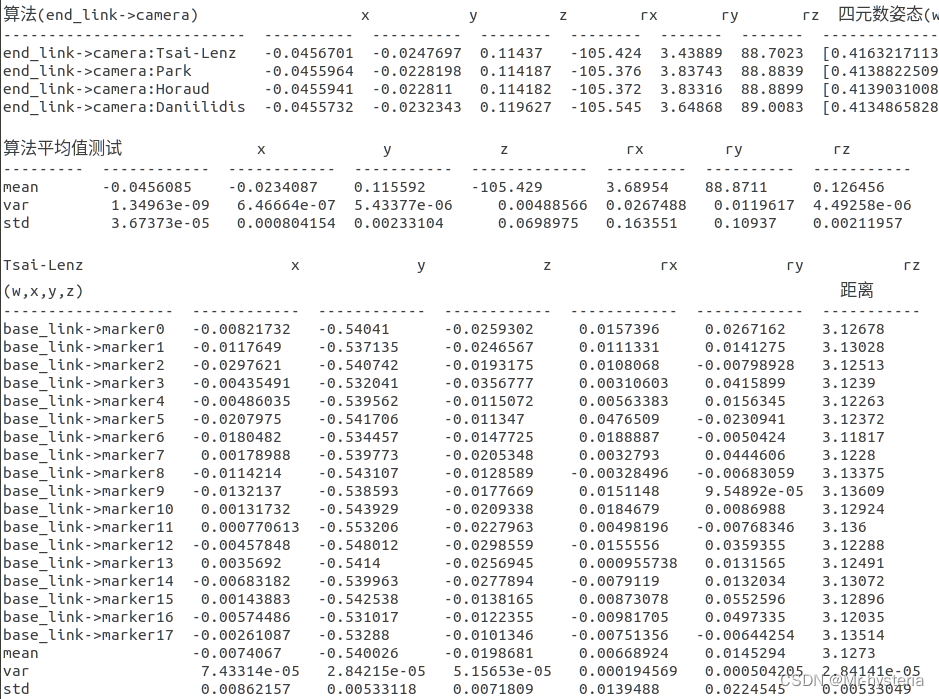
3.標(biāo)定精度
相機(jī)與link5之間的坐標(biāo)變化才是不變的
眼在手上的時(shí)候,板子與基座之間的變化是固定的,因此可以看他們的標(biāo)準(zhǔn)差來(lái)判斷是否精確。std預(yù)計(jì)需要0.005以下才行
aruco碼隔的近效果好,因此盡量使相機(jī)與二維碼近一點(diǎn),可以使用較小的二維碼
多個(gè)角度拍攝
總結(jié):多角度,小距離。(上下左右,左上,右上,左下,右下。)每個(gè)位置拍攝兩組或者三組(末端盡量不動(dòng),其他關(guān)節(jié)進(jìn)行組合)。效果還行,如下:
其他:
打開(kāi)rviz可以清楚的看到有幾個(gè)坐標(biāo)及名稱還有tf樹(shù)之間坐標(biāo)的關(guān)系(大象機(jī)器人是base..link6)
以下代碼可以查看坐標(biāo)之間的變化矩陣:rosrun tf tf_echo base link5
XYZ---紅、綠、藍(lán)色(rviz中)
numpy.linalg.LinAlgError: Eigenvalues did not converge(這個(gè)報(bào)錯(cuò)是因?yàn)樽约号臄z的拍攝的照片以及數(shù)據(jù)存在很大問(wèn)題)
眼在手上可以看base->marker的標(biāo)準(zhǔn)差(std),越穩(wěn)定越好
審核編輯:符乾江
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28641瀏覽量
208412 -
python
+關(guān)注
關(guān)注
56文章
4807瀏覽量
85037 -
機(jī)械臂
+關(guān)注
關(guān)注
12文章
520瀏覽量
24725 -
ROS
+關(guān)注
關(guān)注
1文章
280瀏覽量
17096
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
大象機(jī)器人11月大事件回顧
大象機(jī)器人推出力控夾爪myGripper F100
大象機(jī)器人10月大事件回顧
abb機(jī)器人工具坐標(biāo)系問(wèn)題
助力風(fēng)電行業(yè)!深視智能SR7400線激光以機(jī)器人手眼標(biāo)定實(shí)現(xiàn)風(fēng)力葉片切割引導(dǎo)

Al大模型機(jī)器人

機(jī)器人手眼標(biāo)定軟件 #視覺(jué)定位 #視覺(jué)標(biāo)定 #視覺(jué)軟件 #協(xié)作機(jī)器人 #視覺(jué)系統(tǒng)
AMD Kria? KR 260套件+ROS 2快速開(kāi)發(fā)機(jī)器人解決方案

大象機(jī)器人完成Pre-B輪融資,致力打造全新機(jī)器人生態(tài)!
技術(shù)融合與創(chuàng)新大象機(jī)器人水星Mercury X1人形機(jī)器人案例研究!
機(jī)器視覺(jué)定位及引導(dǎo)系統(tǒng)的方案

myCobot Pro 630 煥新上市!全面助力六自由度協(xié)作機(jī)器人商用化進(jìn)程推進(jìn)!
富唯智能自研機(jī)器人手眼標(biāo)定軟件# 機(jī)器人視覺(jué) # 視覺(jué)軟件 # 視覺(jué)引導(dǎo) # 機(jī)器人 # 視覺(jué)技術(shù)

富唯智能自研機(jī)器人手眼標(biāo)定軟件ForwardCalib #機(jī)器人 #軟件 #工業(yè)軟件 #3D視覺(jué)
機(jī)器人手眼標(biāo)定技術(shù)你真的懂嗎?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論