 無人機遙感數據的處理與滑坡信息提取
無人機遙感數據的處理與滑坡信息提取
近些年無人機遙感技術發展迅速,已經成為傳統航空攝影測量的有利補充,它具有拍攝角度靈活,起降不受地形地勢影響,懸停時間長,分辨率高等優勢,已被廣泛應用在地質環境與災害調查、國土資源管理、基礎地理信息更新等領域。雖然無人機獲取的影像分辨率較高,但由于無人機所攜帶的相機一般為普通的數碼相機,這種相機的像幅較小,使得獲取的影像數量較多,影像畸變較大;由于拍攝時傾角過大以及傾斜方向不規律的原因,使得相鄰影像同名點之間存在尺度與旋轉的差異;另外無人機上搭載的GPS精度較低,利用POS數據進行絕對定向時誤差較大,因此只依賴于傳統的攝影測量方法不適合處理無人機影像。郭復勝等成功地將三維重建技術應用到無人機圖像處理領域,實現了對全自動的大場景三維重建,從而實現了利用無人機影像獲取高分辨率的DOM,但未獲取地面控制點,因此無法進行絕對定向,限制了成果的進一步利用。雖然近些年無人機遙感得到了廣泛的應用,但是在滑坡信息提取方面的研究較少,特別是運用高精度的DEM與DOM對滑坡區域進行定量的提取與分析方面。
因此,本文采用多旋翼無人機搭載高光譜成像相機的影像獲取平臺,采取傾斜拍攝與垂直拍攝相結合的拍攝方式,獲取了滑坡表面豐富的光譜與紋理信息;在絕對定向方面,采用RTK野外測量控制點的方式,克服了POS信息精度低的問題;在影像處理方面,將計算機視覺算法與攝影測量原理相結合,實現了DEM與DOM的數據生產;在滑坡信息提取方面,采用多尺度分割與面向對象分類方法,并引入了坡度信息、可見光波段差異植被指數、灰度共生矩陣作為分類參數,運用基于閾值的模糊分類與SVM監督分類方法實現了滑坡信息的提取,使得無人機遙感在滑坡信息提取領域有了更深一步的應用。
1 研究區概況和數據獲取
1.1研究區概況
本文的研究區位于北京市西南部的霞云嶺鄉附近,經度范圍115°36′20″~115°37′25″E,緯度范圍39°42′35″~39°43′25″N。研究區縱向長為850m,橫寬約900m,海拔范圍378~850m,研究區概況如圖1所示。研究區主要為山區,地形起伏較大,平均坡度為30°,其中疑似滑坡區域的最大坡度為55°。該區域主要為公路施工殘渣的堆渣場,表現出潛在的變形復活跡象,伴隨著復雜的地形條件和人為因素,一旦發生滑坡將會造成巨大的人員和財產損失。
1.2控制點的量測
本文選擇55個均勻分布在研究區內的控制點進行三維坐標的量測,為了獲得高精度的控制點,選取地勢較高,視野開闊的區域架設基站點,并在每個測量點上涂抹油漆,便于后期對無人機影像進行絕對定向。控制點的量測有兩個目的:①可以用來對無人機影像進行絕對定向;②可以對獲取的DEM和DOM影像進行精度驗證。本實驗空間參考選擇WGS_1984_UTM投影坐標系,其中5個控制點用于絕對定向,公路區域內20個點和滑坡區域內30個點作為檢查點,用于精度驗證,其中測量點的空間位置與標記以及基站的位置如圖1所示。
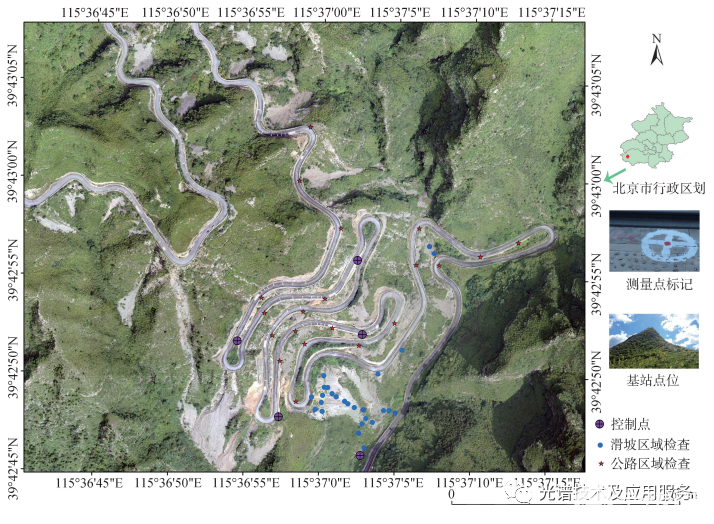
圖1研究區概況及控制點和檢查點的分布
1.3無人機影像的獲取
本文研究區為山區,地勢起伏大,高程變化顯著,因而會增加影像的畸變,并且傳統的垂直拍攝的方式可能會損失部分紋理信息,因此本文對重點研究區域采取傾斜拍攝與垂直拍攝相結合的影像獲取方式,充分利用側視影像來獲取地物的側面紋理信息,更有利于提取滑坡特征。研究區內大部分為山區的公路和低矮植被,地物種類少,具有顯著特征的地物較少,為了保證影像匹配以及后期成果的精度,在航線規劃過程中盡量增加重疊度,本次飛行過程中航向重疊不低于75%,旁向重疊不低于60%。因此,在飛行航線的設計過程中,需要根據航向重疊、旁向重疊、地面分辨率的要求來設定飛行航高以及拍攝位置,并結合航高與相機參數來計算航線的最低點的分辨率,具體計算公式如下:
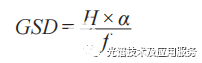
通過上述計算確定本次實驗分為2次飛行:第1次飛行對整個研究區進行垂直拍攝,飛行航高為950m;第2次飛行對重點滑坡區域進行垂直拍攝加傾斜拍攝,其中垂直拍攝的飛行航高為720m,傾斜拍攝航高為700m。
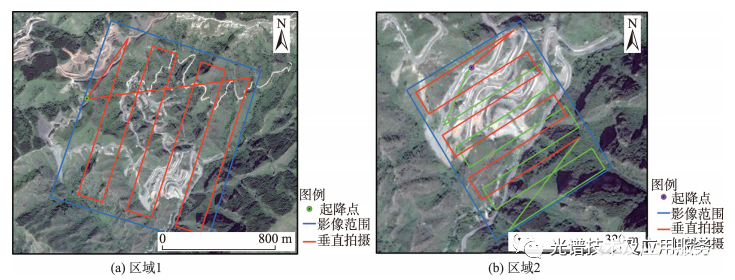
圖2飛行航線和影響范圍
2 數據處理和精度驗證
2.1無人機影像的預處理
由于無人機的飛行姿態較不穩定,加上北京的空氣常伴有霧霾,因此導致獲取的無人機影像曝光不均勻,相片偏白,本文采用多尺度Retinex算法對圖像進行增強處理,該算法是一種基于光照補償的影像增強算法,經過處理后每張照片圖像清晰,色調均勻。為了保證后期產品的精度,在人工選取控制點進行絕對定向時,選擇了標志點清晰、重疊率高、均勻分布于重點研究區域的5個點作為控制點,并將每個控制點轉刺到5到8張相片上,其中控制點的分布如圖1所示。
2.2自動空中三角測量
空中三角測量是無人機影像處理的核心內容,其結果的質量直接影響后期DEM和DOM的精度,主要包括以下3個方面:
(1)特征點的提取與匹配:通過SURF算法提取每張照片的特征點進行匹配,并通過RANSAC算法對匹配的結果進行優化,以提高匹配精度。
(2)相對定向與絕對定向:通過相片的焦距信息以及匹配的特征點進行相對定向,從而恢復每張照片拍攝時的空間姿態,其空間位置如圖3所示。接著通過野外測量的控制點進行絕對定向,從而使每張照片具有絕對的空間坐標。
圖3相片的空間位置與覆蓋范圍
(3)光束法平差:根據提取的特征點以及匹配點來恢復投影光束,并按照光束法平差模型對研究區進行整體解算,求取像點坐標與相片的內外方位元素。區域1中選取的5個控制點中誤差為0.103m,區域2中5個控制點中誤差為0.079m
2.3DEM和DOM的生產
DEM和DOM是后期信息提取的核心數據,通過該數據可以獲取滑坡的空間形態與表面紋理信息。利用空中三角測量加密后的結果進行密集匹配,生成高精度的三維點云數據,依據點云數據生成DEM影像。根據高精度的DEM影像依次對每張相片進行數字微分糾正,并進行拼接與鑲嵌處理,從而獲得整個研究區的DOM影像。通過上述方法,獲得整個研究區(圖2(a))的DOM和DEM數據,其空間分辨率為8.6cm,重點區域(圖2(b))的分辨率為5.4cm,數據成果如圖4所示。
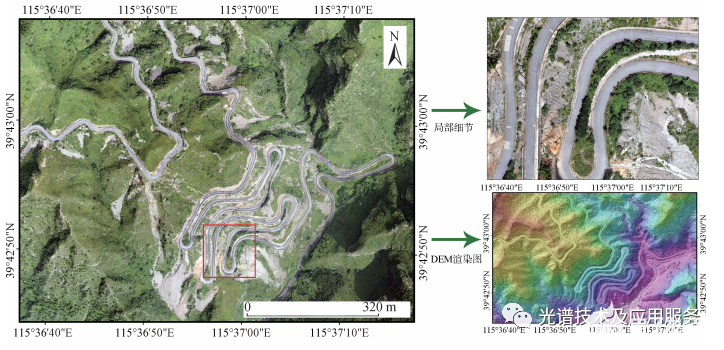
圖4研究區DOM與DEM影像
2.4DEM和DOM的精度評價
高精度的DEM和DOM數據對地形地勢分析和滑坡信息提取具有十分重要的意義,因此需要選擇合適的方法來對DEM和DOM進行精度驗證。本文通過野外測量的檢查點坐標與獲取的DEM與DOM數據進行運算來完成精度驗證。選取50個均勻分布在研究區內的點作為檢查點,其中30個點分布在滑坡區域,20個點分布在公路區域,分布情況如圖1所示。對于DEM的驗證,通過將野外GPSRTK測量的檢查點高程值與相應點的DEM影像值進行運算得到誤差。
DOM的精度評價方法與上述方法類似,通過野外GPSRTK測量的檢查點平面坐標與DOM上相應點坐標進行運算得到誤差。根據上述方法,計算得到DEM與DOM影像中檢查點中誤差,其中DEM影像的高程中誤差為0.253m,DOM的水平位移中誤差為0.104m。根據《數字航空攝影測量空中三角測量規范》(GB/T23236-2009)的要求,符合1:500的DEM與DOM的制作要求,因此,本文的實驗成果具有較高的精度。本文獲取的DOM影像分辨率較高,較好地保留了局部的紋理信息,其中植被、裸露巖石、堆積碎石清晰可見,彌補了衛星影像分辨率不足的劣勢。參照驗證結果,DEM數據具有較高的分辨率與位置精度,相較于地面測量獲取DEM的方式,本文的方法生產效率高,并且有精度保證;相較于運用遙感影像建立的立體像對獲取DEM方法,本文的研究方法在精度上有了大幅度的提升。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統的研發、生產和銷售。
審核編輯 黃昊宇
-
無人機
+關注
關注
230文章
10774瀏覽量
185937 -
光譜傳感器
+關注
關注
1文章
86瀏覽量
15551
發布評論請先 登錄
《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
遙感影像分析的方法與步驟
DIY了一臺無人機,用全志T113芯片
開源項目!DIY了一臺無人機,用全志T113芯片
基于無人機高光譜遙感的河湖水環境探測
光伏電站無人機智能巡檢系統

基于無人機多光譜遙感的棉花生長參數和產量估算
【「時間序列與機器學習」閱讀體驗】時間序列的信息提取
【《時間序列與機器學習》閱讀體驗】+ 時間序列的信息提取
無人機智能巡檢系統
光伏無人機自動巡檢系統的優勢價值
基于無人機遙感的作物長勢監測研究進展






 工商網監
工商網監
評論