 多傳感器融合在自動駕駛中扮演的角色
多傳感器融合在自動駕駛中扮演的角色

自動駕駛核心在于車,那智能網聯系統又是什么呢?智能網聯的載體也是車,但核心是需要連接的網絡。一個是汽車內部的傳感器和智能控制系統構成的一張網絡,另一個是所有汽車連接、共享的網絡。網聯就是將一臺車置身到一張大的網絡之中,去交換重要的信息,比如位置、路線、速度等信息。智能網聯系統的發展目標就是通過汽車內部傳感器和控制系統的設計優化能夠改善汽車的安全性和舒適性,使汽車更加人性化,當然終極目標是在實現無人駕駛。
上次說到自動駕駛汽車三大核心輔助系統:環境感知系統、決策與規劃系統和控制與執行系統,這也是智能網聯汽車車輛本身必須解決的三大關鍵技術問題。
環境感知系統在智能網聯系統里面扮演什么角色?
什么是環境感知技術,主要包含哪些內容?
環境感知主要包括三個方面:傳感器、感知和定位。傳感器包括攝像頭、毫米波雷達、激光雷達以及超聲波,不同傳感器被安置在車輛上,分別發揮著采集數據,識別顏色、測量距離等作用。
智能汽車要想采用傳感器獲得的數據去實現智能駕駛,通過傳感器獲得的數據必須經過(感知)算法處理,匯算成數據結果,實現車、路、人等信息交換,使車輛能夠自動分析車輛行駛的安全還是危險狀態,讓車輛能夠按照人的意愿實現智能駕駛,最終替代人來做出決策和無人駕駛目標。
那這里就會有個關鍵技術問題,不同傳感器發揮的作用不同,多個傳感器掃描到數據如何形成一個完整的物體圖像數據呢?
——多傳感器融合技術
攝像頭的作用主要是識別物體顏色,但會受陰雨天氣的影響;毫米波雷達能夠彌補攝像頭受陰雨天影響的弊端,能夠識別距離比較遠的障礙物,比如行人、路障等,但是不能夠識別障礙物的具體形狀;激光雷達可以彌補毫米波雷達不能識別障礙物具體形狀的缺點;超聲波雷主要識別車身的近距離障礙物,應用在車輛泊車過程中比較多。要想融合不同傳感器的收集到外界數據為控制器執行決策提供依據,就需要經過多傳感器融合算法處理形成全景感知。
什么是多傳感器融合(融合算法處理),主要有哪些融合算法?
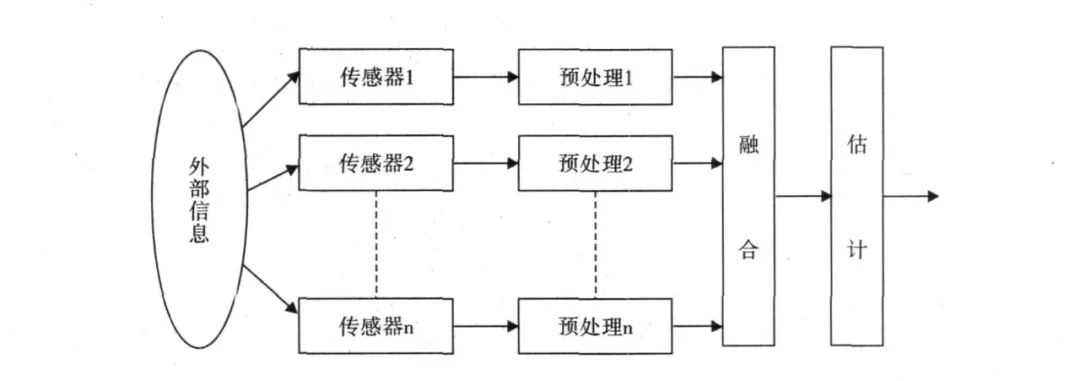
多傳感器融合基本原理就像人腦綜合處理信息的過程一樣,將各種傳感器進行多層次、多空間的信息互補和優化組合處理,最終產生對觀測環境的一致性解釋。在這個過程中要充分利用多源數據進行合理支配與使用,而信息融合的最終目標則是基于各傳感器獲得的分離觀測信息,通過對信息多級別、多方面組合導出更多有用信息。這不僅是利用了多個傳感器相互協同操作的優勢,而且也綜合處理了其它信息源的數據來提高整個傳感器系統的智能化。
多傳感器數據融合概念最早應用于軍事領域,近年來隨著自動駕駛的發展,各種雷達運用于車輛做目標的檢測。因為不同的傳感器都存在數據準確性的問題,那么最終融合的數據該如何判定?比如激光雷達報告前車距離是5m,毫米波雷達報告前車距離是5.5m,攝像頭判定前車距離是4m,最終中央處理器該如何判斷。那就需要一套多數據融合的算法來解決這個問題。
多傳感器融合的常用方法分為兩大類:隨機和人工智能。AI類主要是模糊邏輯推理和人工神經網絡方法;隨機類方法主要有貝葉斯濾波、卡爾曼濾波等算法。目前汽車融合感知主要采用隨機類融合算法。
自動駕駛汽車融合感知算法課程主要采用卡爾曼濾波算法,利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法,它是目前解決絕大部分問題都是最優、效率最高的的方法。
多傳感器需要進行融合算法處理,企業相應就會需要融合感知類的算法工程師去解決多傳感器融合的問題,融合感知類的絕大多數的崗位要求都是需要能夠掌握多種傳感器的工作原理及信號的數據特征,能夠掌握融合算法進行軟件開發以及傳感器標定算法能力以及點云數據處理、深度學習檢測算法等等。
環境感知的的第三部分內容——定位(slam)
Slam叫做同步定位和制圖,是假設場景是靜態情況下通過攝像機的運動來獲取圖像序列并得到場景3-D結構的設計,這是計算機視覺的重要任務,攝像機獲得的數據經過算法處理也就是視覺slam。
環境感知定位方法除了視覺slam,還有激光雷達slam、GPS/IMU和高精地圖。這些傳感器獲得的數據都是需要經過算法的處理才能形成數據結果為自動駕駛決策提供位置信息依據。
所以想要從事環境感知方向的工作,不僅可以選擇融合感知算法崗位,還可以選擇slam方向。選擇轉崗感知算法類工作也是個不錯的選擇,專業熱門,薪資高,當然入門學習相比運動控制算法工程師課程需要一定的高等數學基礎,課程難度中等。
多傳感器融合算法,目前不僅僅應用在自動駕駛領域,還應用在機器人領域,對于就業來說是個一大的契機。
審核編輯:郭婷
-
傳感器
+關注
關注
2565文章
52982瀏覽量
767268 -
自動駕駛
+關注
關注
789文章
14316瀏覽量
170598 -
毫米波雷達
+關注
關注
107文章
1102瀏覽量
65364
原文標題:多傳感器融合為什么是自動駕駛的必由之路?
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
康謀分享 | 基于多傳感器數據的自動駕駛仿真確定性驗證

自動駕駛汽車是如何準確定位的?

技術分享 |多模態自動駕駛混合渲染HRMAD:將NeRF和3DGS進行感知驗證和端到端AD測試

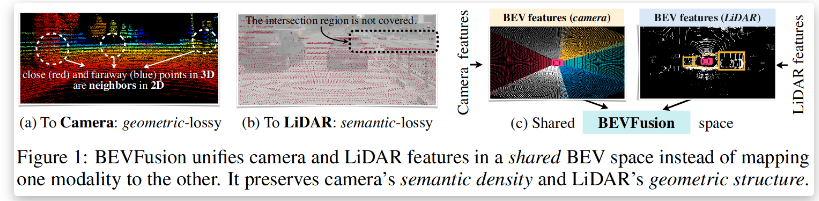
BEVFusion —面向自動駕駛的多任務多傳感器高效融合框架技術詳解
物聯網中的傳感器類型解析 傳感器類型在自動駕駛中的應用
多傳感器融合在自動駕駛中的應用趨勢探究

一文聊聊自動駕駛測試技術的挑戰與創新






 工商網監
工商網監
評論