") 全新ROS 2 Humble硬件加速特性
全新ROS 2 Humble硬件加速特性
自 2021 年 10 月起,NVIDIA 和 Open Robotics 開始合作并推出了兩項(xiàng)重要的改動(dòng),現(xiàn)已發(fā)布在Humble ROS 2版本中,以提高提供硬件加速器的計(jì)算平臺(tái)的性能。
新的 ROS 2 Humble 硬件加速特性包括類型適配和類型協(xié)商。NVIDIA 已于 2022 年 6 月底發(fā)布 NVIDIA Isaac ROS 并推出一個(gè)實(shí)現(xiàn)類型適配和類型協(xié)商的軟件包。
這些對(duì)框架的補(bǔ)充雖然簡單,但功能強(qiáng)大,并且能夠顯著提高性能。開發(fā)人員希望將 AI / 機(jī)器學(xué)習(xí)和計(jì)算機(jī)視覺功能納入其基于 ROS 的應(yīng)用程序中。
Open Robotics 首席執(zhí)行官 Brian Gerkey 表示:“隨著 ROS 開發(fā)人員向其機(jī)器人應(yīng)用程序添加更多的自主權(quán),機(jī)器人上的計(jì)算機(jī)正變得更加強(qiáng)大。我們一直在努力改進(jìn) ROS 框架,以確保它能夠利用這些邊緣計(jì)算機(jī)中的高性能硬件資源。”。
“我們與 NVIDIA 機(jī)器人團(tuán)隊(duì)密切合作,并且很高興在 Humble 版本中分享新功能(類型適配和類型協(xié)商),這將有助于整個(gè) ROS 社區(qū)去接受硬件加速。”
消除硬件加速的開銷
類型適配
硬件加速器通常需要不同的數(shù)據(jù)格式來提供最佳性能。類型適配(REP-2007)現(xiàn)在可用于 ROS 節(jié)點(diǎn),使其以更適合硬件的格式工作。處理管道可以使用自適應(yīng)類型消除 CPU 和內(nèi)存加速器之間的內(nèi)存拷貝。不必要的內(nèi)存拷貝會(huì)消耗 CPU 計(jì)算、浪費(fèi)電力并降低性能,尤其是隨著圖像大小的增加。
類型協(xié)商
另一個(gè)新的創(chuàng)新是類型協(xié)商(REP-2009)。處理管道中的不同 ROS 節(jié)點(diǎn)可以公布其支持的類型,以便選擇產(chǎn)生理想性能的格式。ROS 框架執(zhí)行此協(xié)商過程,并與不支持協(xié)商的遺留節(jié)點(diǎn)保持兼容性。
使用類型適配和協(xié)商加速處理管道,讓硬件加速器零拷貝成為可能。這減少了軟件開銷,并釋放了底層硬件的潛力。隨著機(jī)器人專家向 NVIDIA Jetson AGX Orin 等更強(qiáng)大的平臺(tái)遷移,他們可以期望實(shí)現(xiàn)更多硬件性能的提升。
這些改動(dòng)完全在 ROS 2 內(nèi)部完成,這確保了與現(xiàn)有工具、工作流和代碼庫的兼容性。
類型適配和類型協(xié)商已顯示出有希望的結(jié)果。在 ROS 2 Foxy 和 ROS 2 Humble 上運(yùn)行了一個(gè)由 ROS 節(jié)點(diǎn)圖組成的基準(zhǔn)測試,每個(gè)節(jié)點(diǎn)的計(jì)算量最小,因此我們可以觀察到底層框架的性能。我們?cè)贜VIDIAJetson AGX Xavier和新的NVIDIA Jetson AGX Orin運(yùn)行了這一基準(zhǔn)測試,我們觀察到 NVIDIA Jetson AGX Xavier 有 3 倍的提高,而 NVIDIA Jetson AGX Orin 有驚人的7 倍提高。
引入NVIDIA Issac用于ROS傳輸
NVIDIA 對(duì)類型適配和協(xié)商的實(shí)現(xiàn)稱為NITROS。這些是由 Isaac ROS 硬件加速模塊(又稱為 GEMs)組成的 ROS 處理管道。這些管道在 Isaac ROS 開發(fā)者預(yù)覽(DP)中提供,并且已于 2022 年 6 月底發(fā)布。NITROS 的首次發(fā)布將包括三條管道,計(jì)劃在今年晚些時(shí)候推出更多管道。
強(qiáng)大的新型GEMs輔助機(jī)器人感知
除了 NITROS 加速管道外,IsaacROS DP 版本還包含兩個(gè)新的基于 DNN 的 GEM,旨在幫助機(jī)器人專家完成常見的感知任務(wù)。
第一個(gè) GEM——ESS是用于立體相機(jī)視差預(yù)測的 DNN。該網(wǎng)絡(luò)為機(jī)器人應(yīng)用提供基于視覺的連續(xù)深度感知。
另一個(gè) GEM——Bi3D是用于基于視覺的障礙預(yù)測的 DNN 。基于 NVIDIA Research 的開創(chuàng)性工作,對(duì) DNN 進(jìn)行了改進(jìn),以檢測自由空間,同時(shí)預(yù)測障礙物。該網(wǎng)絡(luò)可預(yù)測障礙物是否位于立體攝像頭的四個(gè)可編程鄰近區(qū)域之一。
Bi3D 經(jīng)過優(yōu)化,可在 NVIDIADLA 硬件上運(yùn)行。利用 DLA,可以同時(shí)保留 GPU 和 CPU 計(jì)算資源。
Bi3D 和 ESS 都經(jīng)過預(yù)訓(xùn)練,可應(yīng)用于使用合成和真實(shí)數(shù)據(jù)的機(jī)器人,并擬用于商業(yè)用途。這兩款新的Isaac ROS GEM加入了stereo_image_proc,這是此前發(fā)布的經(jīng)典計(jì)算機(jī)視覺立體深度視差程序,為立體相機(jī)深度感知提供了三種不同的、獨(dú)立的功能。
快速入門
ROS 開發(fā)人員若有興趣將 NVIDIA AI 感知集成到其產(chǎn)品中,可以從今天開始使用 Isaac ROS。
審核編輯:湯梓紅
-
加速器
+關(guān)注
關(guān)注
2文章
824瀏覽量
38949 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5258瀏覽量
105856 -
ROS
+關(guān)注
關(guān)注
1文章
285瀏覽量
17588
原文標(biāo)題:通過NVIDIA Isaac ROS傳輸改善ROS 2應(yīng)用的感知性能
文章出處:【微信號(hào):NVIDIA-Enterprise,微信公眾號(hào):NVIDIA英偉達(dá)企業(yè)解決方案】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
推動(dòng)硬件輔助驗(yàn)證平臺(tái)增長的關(guān)鍵因素

【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+ROS2應(yīng)用案例
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
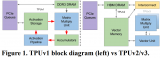
TPU處理器的特性和工作原理
2D圖形渲染緩慢怎么加快?
名單公布!【書籍評(píng)測活動(dòng)NO.58】ROS 2智能機(jī)器人開發(fā)實(shí)踐
數(shù)據(jù)中心中的FPGA硬件加速器
基于Xilinx XCKU115的半高PCIe x8 硬件加速卡
TDA4VM上的硬件加速運(yùn)動(dòng)恢復(fù)結(jié)構(gòu)算法

AM62A SoC通過硬件加速視覺處理改進(jìn)條形碼讀取器
適用于數(shù)據(jù)中心應(yīng)用中的硬件加速器的直流/直流轉(zhuǎn)換器解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論