") 智慧城市:智能交通系統(tǒng)中的激光雷達(dá)案例
智慧城市:智能交通系統(tǒng)中的激光雷達(dá)案例

智慧城市議程的一個(gè)方面是智能交通系統(tǒng)的部署。舊金山市交通局 (SFMTA) 使用激光雷達(dá)傳感器的試點(diǎn)項(xiàng)目展示了激光雷達(dá)如何為該市的智能交通信號(hào)試點(diǎn)提供解決方案,這是舊金山零愿景政策的一部分。
該市“零愿景”政策的目標(biāo)是改善道路安全,因?yàn)閾?jù)認(rèn)為每年約有 30 人在舊金山街頭旅行時(shí)喪生,另有 200 多人受重傷。在這個(gè)更大的框架內(nèi)進(jìn)行智能交通信號(hào)試點(diǎn)的目標(biāo)是探索使用多模式智能交通信號(hào)系統(tǒng) (MMITSS)、專用短程通信 (DSRC)、交通信號(hào)優(yōu)先 (TSP) 和緊急車輛搶占 (EVP) ) 為緊急和運(yùn)輸車輛提供優(yōu)先權(quán)的技術(shù)。此外,MMITSS 還應(yīng)該能夠檢測(cè)行人和自行車,為他們提供領(lǐng)先的間隔、加擾和/或受保護(hù)的相位。
于 2020 年 1 月結(jié)束的第一個(gè)概念驗(yàn)證在五個(gè)十字路口部署了激光雷達(dá)傳感器,并展示了以 96% 的準(zhǔn)確率準(zhǔn)確匿名地分析數(shù)據(jù)的能力。第二個(gè)概念驗(yàn)證期望將數(shù)據(jù)層添加到信號(hào)控制網(wǎng)絡(luò)中,以啟用 ITS 中的“智能”;這項(xiàng)工作正在進(jìn)行中,預(yù)計(jì)將于 2021 年初完成。
我們采訪了兩位相關(guān)人士,他們對(duì)這項(xiàng)技術(shù)、其部署和獲得的結(jié)果有所了解,在這里我們展示了對(duì)話的重點(diǎn)。首先,我們采訪了激光雷達(dá)傳感器技術(shù)提供商 Quanergy 的首席營(yíng)銷官 Enzo Signore。然后,我們與 SFMTA 項(xiàng)目的獨(dú)立戰(zhàn)略執(zhí)行顧問 Paul Hoekstra 一起深入研究了實(shí)際的概念驗(yàn)證項(xiàng)目。
激光雷達(dá):匿名跟蹤對(duì)象的 ID
Quanergy 的 Enzo Signore解釋了激光雷達(dá)技術(shù)在此類應(yīng)用中的優(yōu)勢(shì),需要人員和車輛計(jì)數(shù)和流量管理,尤其是在禁止面部識(shí)別的情況下。
激光雷達(dá)技術(shù)在體育場(chǎng)和智能城市等應(yīng)用中的關(guān)鍵價(jià)值主張是能夠匿名跟蹤經(jīng)過各種傳感器點(diǎn)的物體。例如,一輛汽車會(huì)經(jīng)過很多十字路口,或者行人會(huì)經(jīng)過很多區(qū)域。Quanergy 可以做的是為對(duì)象分配一個(gè) ID,該 ID 將在被監(jiān)控區(qū)域的整個(gè)旅程中與對(duì)象保持一致。
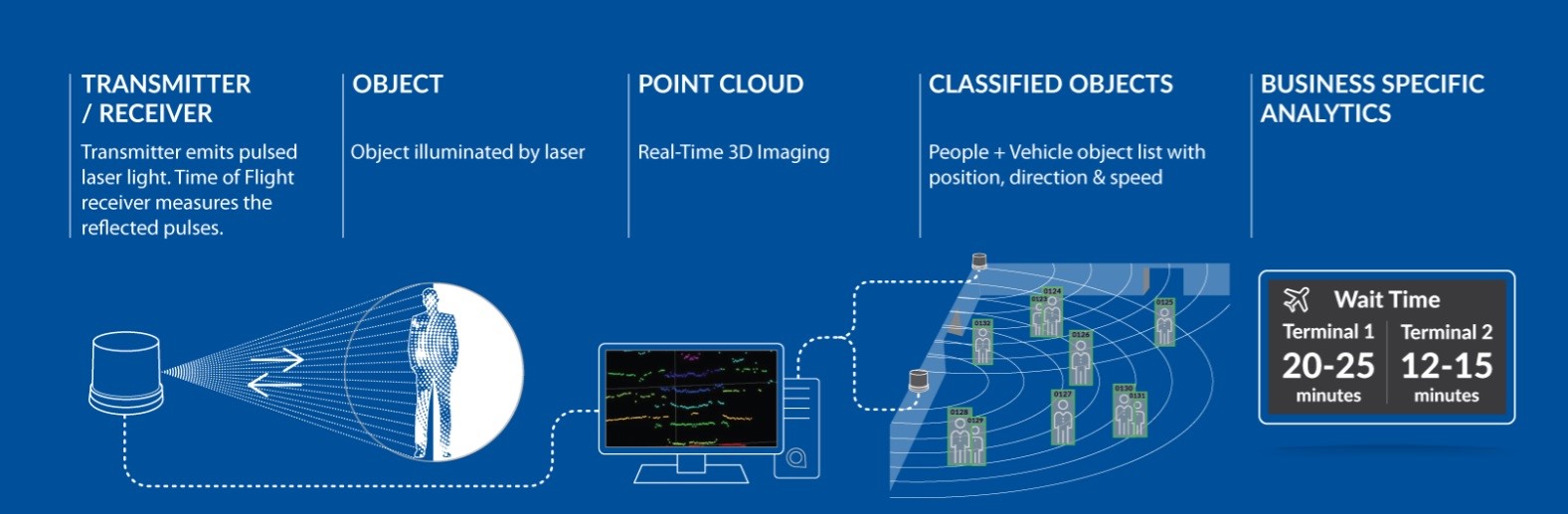
激光雷達(dá)是一種飛行時(shí)間傳感技術(shù),它可以脈沖低功率、人眼安全的激光,并測(cè)量激光完成傳感器和目標(biāo)之間的往返行程所需的時(shí)間。生成的聚合數(shù)據(jù)用于生成 3D 點(diǎn)云圖像,提供空間位置和深度信息以識(shí)別、分類和跟蹤移動(dòng)對(duì)象。(圖片:Quanergy)
這樣做非常復(fù)雜,因?yàn)楫?dāng)您經(jīng)過多個(gè)交叉路口時(shí),您需要多個(gè)傳感器和多個(gè)服務(wù)器來(lái)進(jìn)行邊緣計(jì)算。大多數(shù)技術(shù)只會(huì)對(duì)他們正在管理的區(qū)域有一個(gè)孤立的視圖,當(dāng)跨越一個(gè)區(qū)域和另一個(gè)區(qū)域之間的邊界時(shí),ID 將會(huì)丟失,您將獲得另一個(gè) ID。使用這種方法,您開始忘記所有的人流。
我們有一種稱為自動(dòng) ID 交接的技術(shù),可以將人或車輛的 ID 從一個(gè)區(qū)域傳遞到另一個(gè)區(qū)域。因此,只要我們有視野,相同的 ID 就會(huì)與對(duì)象保持一致。這提供了非常好的端到端可見性和跟蹤。這對(duì)于機(jī)場(chǎng)很重要,例如從路邊到登機(jī)口,您可以優(yōu)化乘客體驗(yàn),以及購(gòu)物中心和城市。每個(gè)人的單一 ID 有助于實(shí)現(xiàn)端到端分析。
Quanergy 的傳感器 M 系列提供長(zhǎng)距離檢測(cè),例如專為流量管理應(yīng)用而設(shè)計(jì)的 MQ-8。以下是這些傳感器的不同之處。典型的激光雷達(dá)傳感器具有對(duì)稱的光束配置。如果您將傳感器平放,則通常一半的光束會(huì)射向天空,一半的光束會(huì)射向地面。如果它安裝在 3 米高的路燈柱上,俯視行人視野,那么在這種配置中,一半的光束被浪費(fèi)了。
在我們的設(shè)計(jì)中,所有的光束實(shí)際上都指向下方,從而能夠?qū)ΨQ地覆蓋地面。這意味著當(dāng)一個(gè)人走過視野時(shí)沒有盲點(diǎn)。這使得能夠在視野范圍內(nèi)的任何地方不間斷地跟蹤人員或車輛。我們可以看到一個(gè)最大范圍為 70m(即:15,000 平方米)的物體。這是一個(gè)非常大的區(qū)域,否則需要許多攝像機(jī)才能實(shí)現(xiàn)類似的覆蓋范圍。因此,這減少了傳感器的數(shù)量以及成本。
克服與面部識(shí)別相關(guān)的隱私問題
SMTA 的 Paul Hoekstra描述了在 3rd Street的五個(gè)十字路口實(shí)施第一個(gè)概念驗(yàn)證 (PoC) 背后的想法和結(jié)果,并計(jì)劃擴(kuò)大覆蓋范圍。
我們于 2019 年 4 月開始與 SFMTA、思科和 Quanergy 作為該項(xiàng)目的合作伙伴合作。最初作為思科軟件包的一部分,我們擁有 DSRC 傳感器。我們發(fā)現(xiàn)我們只是用它們來(lái)聽走廊里和我們正在覆蓋的高速公路上的所有汽車。我們發(fā)現(xiàn)只有不到 1% 的汽車實(shí)際上會(huì)廣播 DSRC 信號(hào)。從這個(gè)用例的角度來(lái)看,結(jié)論是不能使用 DSRC 進(jìn)行流量測(cè)量。它只是不足以做出決定。
在這個(gè)時(shí)間點(diǎn),我們現(xiàn)在已經(jīng)完成了第一個(gè)(PoC)與 Quanergy 傳感器,現(xiàn)在我們正處于第二個(gè) PoC 的中間。
在第一個(gè) PoC 中,我們使用了 20 個(gè)激光雷達(dá)傳感器,將它們安裝在 3 rd Street 的五個(gè)十字路口,靠近去年開放的新籃球場(chǎng)。我們使用運(yùn)行 Quanergy QORTEX 軟件的 Cisco TRX 進(jìn)行邊緣計(jì)算。來(lái)自激光雷達(dá)的數(shù)據(jù)通過 TRX 盒,Qortex 軟件將數(shù)據(jù)發(fā)布到網(wǎng)絡(luò),該網(wǎng)絡(luò)將進(jìn)入數(shù)據(jù)中心,這是一個(gè)運(yùn)行 Cisco Kinetic 平臺(tái)的小型 VM 集群,存儲(chǔ)所有消息——每周 3000 萬(wàn)條。
每個(gè)星期天都會(huì)在上面發(fā)布報(bào)告,一份關(guān)于車輛的報(bào)告,通過交叉路口的激光雷達(dá) ID 識(shí)別車輛,并帶有一大堆屬性,比如時(shí)間、星期幾、它來(lái)自哪里、去哪里、多久停止一次,停止多長(zhǎng)時(shí)間,速度是多少,是否有事件(來(lái)自事件日歷)。這樣,我們就可以連接所有的十字路口,并跟隨車輛通過走廊。然后我們可以說(shuō),“這是在走廊南側(cè)進(jìn)入北行的數(shù)量,然后關(guān)閉了多少,等等”。
我們使用 Quanergy 的 QORTEX 對(duì)其進(jìn)行了校準(zhǔn),并達(dá)到了 96% 的準(zhǔn)確度。您不能只用激光雷達(dá)計(jì)算 ID;您必須構(gòu)建邏輯以確保出口中的 ID 與入口中的 ID 相同。有了這個(gè)邏輯,我們可以跟隨汽車通過十字路口。我們有定義什么是停止的邏輯。因此,我們最終達(dá)到了 96% 的準(zhǔn)確度,它非常精確。對(duì)于行人,通過我們定義的區(qū)域,您可以看到該人是在路邊上還是在路邊外。您可以查看一個(gè)人是在人行橫道的邊界之內(nèi)還是之外。你可以看到一輛車離這個(gè)人有多近。有了這種數(shù)據(jù),我們就可以創(chuàng)建未遂事故報(bào)告。我們已經(jīng)定義了near misses是什么——向量、速度,然后計(jì)算它們碰撞的時(shí)間,以及它是否在一定的范圍內(nèi),然后你稱之為near miss。
這之所以成為可能,是因?yàn)閬?lái)自 QORTEX 的數(shù)據(jù)非常精確,我們無(wú)需識(shí)別任何人就可以看到。我們不會(huì)存儲(chǔ)任何可識(shí)別的個(gè)人信息。一個(gè)人只是一個(gè)點(diǎn)。而汽車只是一個(gè)街區(qū),你不知道它是什么車。我們根據(jù)大小進(jìn)行分類。

在第二個(gè)概念驗(yàn)證中,10 個(gè)傳感器覆蓋了舊金山的一條更大的交通走廊,沿著 Channel 和 20th Street 之間的 3rd Street(圖片:Paul Hoekstra)
第一個(gè) PoC 是關(guān)于分析的。在第二個(gè)中,我們正在擴(kuò)大交叉點(diǎn)的數(shù)量。所以現(xiàn)在我們有五個(gè),我們要去十個(gè)。換句話說(shuō),一個(gè)更大的走廊。
然后,我們將對(duì)當(dāng)前鎖定在機(jī)柜內(nèi)的所有數(shù)據(jù)進(jìn)行分層。在機(jī)柜中有一個(gè)信號(hào)控制器,控制器上有許多執(zhí)行器。這些可能是循環(huán)檢測(cè)車輛、行人按鈕或輕軌中的傳感器。有交通信號(hào)優(yōu)先級(jí)。所有這些都位于嵌入式信號(hào)控制器中。
所以我們現(xiàn)在正在做的是實(shí)現(xiàn)與信號(hào)控制器的雙向信息交換,從交叉路口獲取所有數(shù)據(jù),例如激光雷達(dá)數(shù)據(jù)和對(duì)象分類(同樣完全匿名),在站臺(tái)和公交車站。這些傳感器的對(duì)象分類(全部在傳感器上處理)將為我們提供人數(shù)以及他們的分類——例如,是否有人坐在輪椅上,是否有人推著嬰兒車,或者他們是否有一輛自行車。許多這些因素將決定運(yùn)輸車輛的停留時(shí)間。我們想知道根據(jù)那里有多少人預(yù)測(cè)的停留時(shí)間。
從后端系統(tǒng)中,我們將獲取車輛數(shù)量。然后通過分析,我們可以確定是需要 20 秒的停留時(shí)間還是 32 秒的停留時(shí)間。然后我們可以推斷所有 10 個(gè)交叉點(diǎn),
將整個(gè)交通走廊視為一個(gè)網(wǎng)絡(luò)
要優(yōu)化整個(gè)走廊,我們無(wú)法在不準(zhǔn)確了解人員和車輛的位置以及持續(xù)時(shí)間的情況下進(jìn)行。這意味著我們將整個(gè)走廊視為一個(gè)網(wǎng)絡(luò),而不是一個(gè)單獨(dú)的節(jié)點(diǎn)。這意味著我們以高頻率運(yùn)行算法,現(xiàn)在我們正在討論是否需要超過 1 赫茲,我們每秒鐘重新計(jì)算一次。
然后我們實(shí)際上告訴信號(hào)控制器,你應(yīng)該在北行綠燈。這關(guān)閉了循環(huán)。從思科的供應(yīng)鏈工作中學(xué)習(xí),您知道這是您通過交叉路口移動(dòng)物品的唯一方法。所有的技術(shù)都是可用的,但它只優(yōu)化了所有的孤島。通過這種方式,我們正在以一種新的范式,即綜合交通管理方式向前邁進(jìn)一大步。
舊金山已經(jīng)有 7,000 臺(tái)攝像機(jī)。但是相機(jī)只能給你一張 2D 圖片。位置的精度不如使用激光雷達(dá)所能達(dá)到的精度。激光雷達(dá)總是在雨中,在晚上工作。它與隱私問題相去甚遠(yuǎn)。當(dāng)人們知道他們正在被跟蹤,或者他們可以被識(shí)別時(shí),就會(huì)出現(xiàn)人們不信任政府來(lái)保護(hù)他們的問題。
該項(xiàng)目的成果是使應(yīng)急車輛在處理緊急情況時(shí)具有優(yōu)先權(quán),優(yōu)化交通時(shí)間和停靠點(diǎn),甚至在沒有公共交通的情況下將汽車排成一列,以便更有效地通過走廊。
審核編輯 黃昊宇
-
智能交通
+關(guān)注
關(guān)注
12文章
821瀏覽量
44336 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4224瀏覽量
192496 -
智慧城市
+關(guān)注
關(guān)注
21文章
4353瀏覽量
99629
發(fā)布評(píng)論請(qǐng)先 登錄
為什么城市NOA離不開激光雷達(dá)?

激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析

鐳神智能激光雷達(dá)飛行汽車/eVTOL避障系統(tǒng)解決方案—開啟低空安全飛行新未來(lái)

PoE交換機(jī)如何助力智慧城市基礎(chǔ)設(shè)施建設(shè)?
智慧交通系統(tǒng):重塑城市出行體驗(yàn)
激光雷達(dá)領(lǐng)域的新秀利器—SPAD23

全場(chǎng)景適用!TS Spectrum高速數(shù)字化儀在激光雷達(dá)系統(tǒng)中的應(yīng)用
毫米波雷達(dá)在智能交通系統(tǒng)中的作用
智慧交通在智能城市中的應(yīng)用
智慧交通系統(tǒng)的需求分析和建設(shè)目標(biāo)
智慧交通系統(tǒng):構(gòu)建高效安全的城市交通網(wǎng)絡(luò)
激光雷達(dá)在城市規(guī)劃中的應(yīng)用
單北斗有源終端產(chǎn)品在智慧交通系統(tǒng)中的關(guān)鍵作用

物聯(lián)網(wǎng)系統(tǒng)中的高精度測(cè)距方案_單點(diǎn)TOF激光雷達(dá)

TS高速數(shù)字化儀在激光雷達(dá)系統(tǒng)中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論