 基于rt-smart實現掃描雷達
基于rt-smart實現掃描雷達
一、功能描述
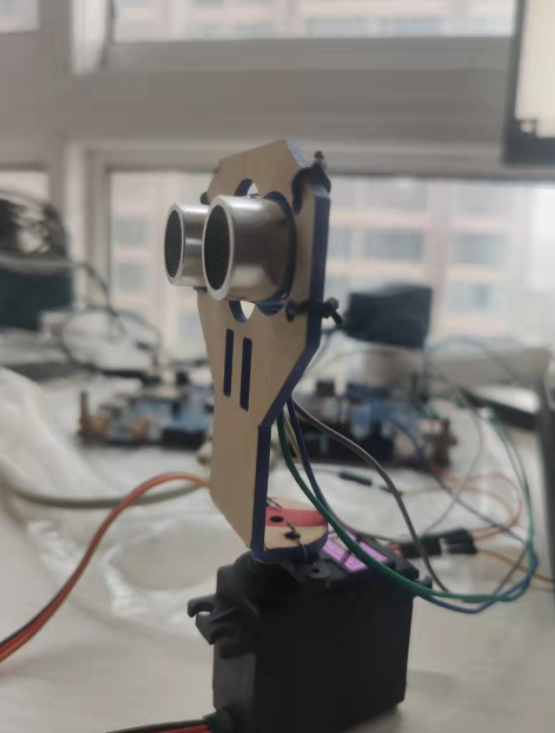
使用控制舵機帶動超聲波測距模塊轉動,同時進行測距,完成對0-180°范圍內的障礙檢測。
使用到了PWM模塊、GPT模塊和ENET模塊
硬件
-
imx6ul開發板
-
舵機
-
超聲波測距模塊
-
網口
軟件
-
下位機基于rt-smart實現
-
控制舵機轉動
-
控制測距模塊進行測距
-
使用UDP協議和上位機進行通訊
-
上位機程序
-
向下位機發送指令,控制設備運行和停止
-
接收掃描數據
-
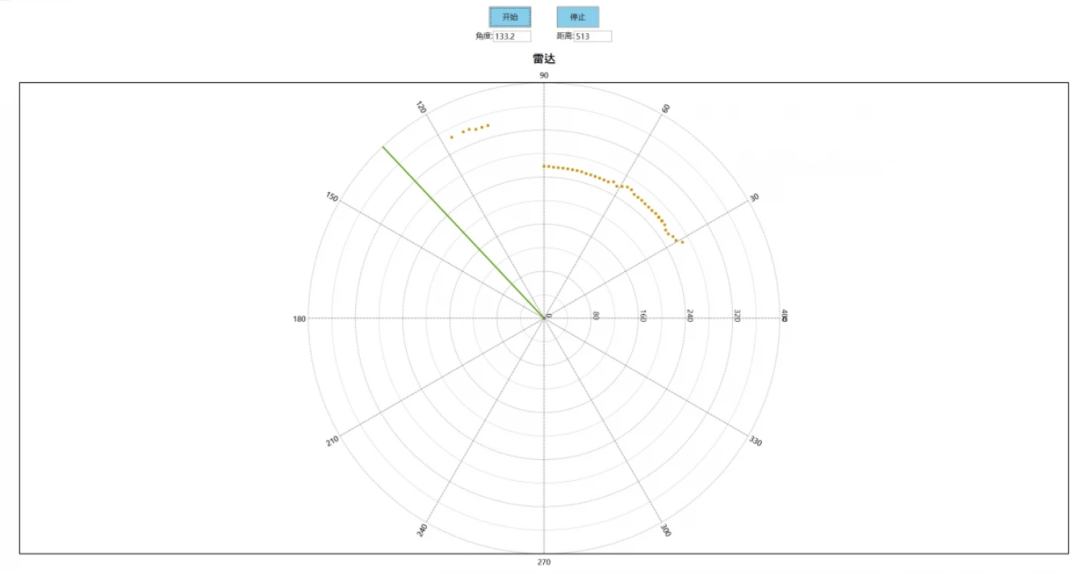
以雷達圖的形式展示掃描結果
二、功能實現
2.1 舵機控制
舵機控制只使用到了PWM模塊,代碼上使用一個循環,實現舵機從0-180°的往復運動。
1voidpwm3_rotor_entry(void*parameter)
2{
3angle=1500;
4int16_tincrease=SCAN_STEP;
5while(1)
6{
7if(myapp_isrunning)
8{
9rotor_set_angle(angle);
10if(angle==500)
11{
12increase=SCAN_STEP;
13}
14elseif(angle==2500)
15{
16increase=-SCAN_STEP;
17}
18angle+=increase;
19}
20else
21{
22rt_thread_mdelay(150);
23rotor_set_angle(1500);
24}
25rt_thread_mdelay(SCAN_PERIOD);
26}
27}
2.2超聲波測距模塊
需要使用PWM模塊和GPT模塊配合控制,PWM模塊用于產生10us的啟動脈沖,GPT模塊用于接收超聲波模塊返回的echo信號,具體的實現在上一篇文章進行了描述。
2.3UDP通信
下位機和上位機采用服務器/客戶端的方式進行通信,下位機作為服務器,上位機作為客戶端
數據包分為兩種,一種為指令包,上位機發給下位機;一種為數據包,下位機發給上位機。下位機在接收到開始指令后,啟動掃描,并開始向上位機發送掃描數據,接收到停止指令時,停止掃描,并停止數據發送。
下位機使用UDP server的方式,參考rt-smart自帶example的UDP server,綁定IP和端口。因為需要同時發送和接收,采用了兩個線程,一個線程用于循環接收上位機的指令,一個線程用于循環發送掃描數據。
1/*接收線程*/
2while(1)
3{
4/*接收數據,并獲取客戶端地址*/
5lwip_recvfrom(transfer.sockfd,(void*)recv_buffer,BUFSZ-1,0,
6(structsockaddr*)&client_addr,&addr_len);
7/*分析數據*/
8if(recv_buffer[0]==1)
9{
10if(recv_buffer[1]==1&&transfer.is_running==0)
11{
12transfer.is_running=1;
13transfer.radar_control(1);
14}
15elseif(recv_buffer[1]==2&&transfer.is_running==1)
16{
17transfer.is_running=0;
18transfer.radar_control(0);
19}
20}
21}
22/*發送線程*/
23while(1)
24{
25if(transfer.is_running)
26{
27/*【5】獲取數據*/
28transfer.get_data(&angle,&distance);
29/*【6】整合數據*/
30/*angle=htons(angle);
31distance=htonl(distance);*/
32tran_data[1]=0xff∠
33tran_data[2]=0xff&(angle>>8);
34tran_data[3]=0xff&distance;
35tran_data[4]=0xff&(distance>>8);
36tran_data[5]=0xff&(distance>>16);
37tran_data[6]=0xff&(distance>>24);
38/*【7】發送數據*/
39lwip_sendto(transfer.sockfd,tran_data,BUFSZ,0,(structsockaddr*)&client_addr,sizeof(structsockaddr));
40}
41rt_thread_mdelay(100);
42}
2.4總結
程序入口
1intmyapp(void)
2{
3rotor_init();
4/*控制舵機轉動*/
5rt_thread_tpwm3_rotor_thread=rt_thread_create(
6"pwm3_rotor",
7pwm3_rotor_entry,
8RT_NULL,
91024,
1025,
115
12);
13if(pwm3_rotor_thread!=RT_NULL)
14{
15rt_thread_startup(pwm3_rotor_thread);
16}
17hr04_enable();
18/*定時獲取角度值*/
19rt_thread_ttest_thread=rt_thread_create(
20"hr04",
21test_fun_entry,
22RT_NULL,
231024,
2425,
255
26);
27if(test_thread!=RT_NULL)
28{
29rt_thread_startup(test_thread);
30}
31/*監控上位機指令*/
32rt_thread_tcontrol_thread=rt_thread_create(
33"myapp",
34myapp_entry,
35RT_NULL,
361024,
3725,
385
39);
40if(control_thread!=RT_NULL)
41{
42rt_thread_startup(control_thread);
43}
44return0;
45}
下位機程序一共使用了4個線程
-
一個用于控制舵機
-
一個用于獲取距離信息
-
一個用于監聽上位機指令
-
一個用于發送掃描數據
三、效果
舵機+超聲波測距
上位機界面
-
PWM
+關注
關注
116文章
5437瀏覽量
218526 -
雷達
+關注
關注
50文章
3096瀏覽量
119661 -
開發板
+關注
關注
25文章
5589瀏覽量
103178
原文標題:rt-smart學習筆記——小實驗:實現“掃描雷達”
文章出處:【微信號:RTThread,微信公眾號:RTThread物聯網操作系統】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
RT-Smart的資料合集
rt-smart中斷阻塞問題是怎么引起的
請問rt-smart gdbserver是閉源的嗎?
請問rt-smart gdbserver是閉源的嗎?
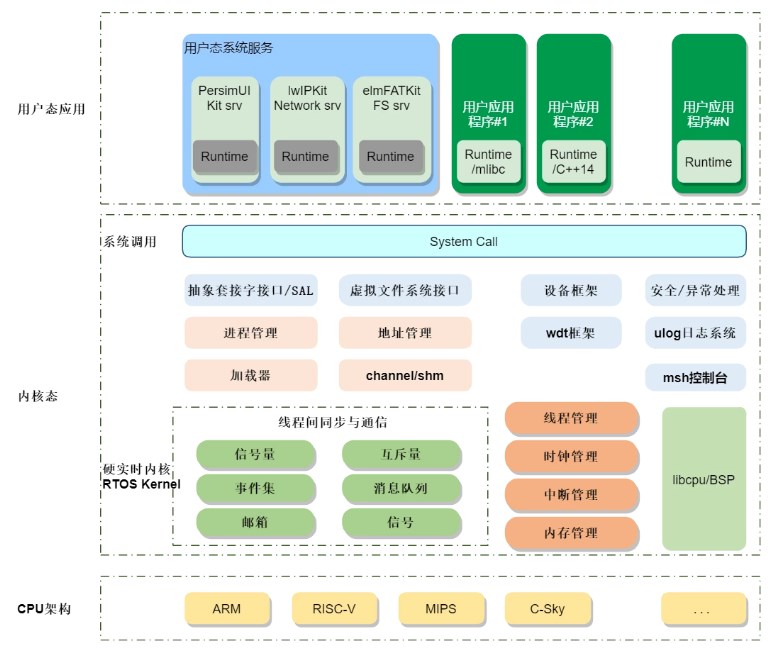
基于RT-Thread操作系統衍生rt-smart實時操作系統簡介
樹莓派上rt-smart的應用編程入門
rt-smart移植分析:從樹莓派3b入手

優雅的在D1S上運行RT-Smart
絲滑的在RT-Smart用戶態運行LVGL
RT-Smart riscv64匯編注釋
零基礎上手rt-smart適配bsp
RT-Smart riscv64匯編注釋
RT-Smart應用開發筆記:fopen造成文件被清空問題的分析記錄





 工商網監
工商網監
評論