 關于對增量式PID公式的疑問與解答
關于對增量式PID公式的疑問與解答
一開始見到PID計算公式時總會問“為什么是這樣子的一道公式”,為了理解那幾道公式,當時將其未簡化前的公式活生生地算了一遍,現在想來,這樣的演算過程固然有助于理解,但假如一開始就帶著對疑問的答案已有一定抽象了解后再進行演算則會理解的更快!
首先推薦白志剛的《由入門到精通—吃透PID2.0版》看完一、二章之后,建議你先通過實踐練習然后再去看書里接下來的其他章節,這樣你對這本書的掌握會更加高效。
PID就是對輸入偏差進行比例積分微分運算,然后將運算的疊加結果去控制執行機構。實踐練習中,如何把這一原理轉化為程序?為什么是用那幾個error進行計算?
以下是我摘錄的一段PID程序,我曾用其對智能車的速度進行閉環控制:
P:Proportional 比例
I:Integrating 積分
D:Differentiation 微分
Pwm_value:輸出Pwm暫空比的值
Current_error:當前偏差
last_error:上次偏差
prev_error:上上次偏差
增量式PID計算公式:
P=Kp*(current_error﹣last_error);
D=Kd*(current_error﹣2*last_error﹢prev_error);
I=Ki*current_error;
PID_add=Pwm_value+P﹢I﹢D;
一、為什么是PID_add=Pwm_value+(P﹢I﹢D)而不是PID_add=P+I+D?
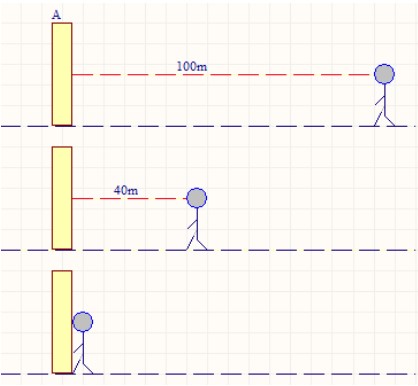
如上圖,有一個人前往目的地A,他用眼睛視覺傳感器目測到距離目的地還有100m,即當前與目的地的偏差為100,他向雙腳輸出Δ=100J的能量,跑呀跑,10s之后,他又目測了一次,此時距離為40m,即current_error=40,他與10s前的偏差last_error=10對比,即current_error - last_error=-60,這是個負數,他意識到自己已經比較接近目的地,可以不用跑那么快,于是輸出Δ=100+(-60)=40J的能量,40J的能量他剛好以4m/s的速度跑呀跑,10s之后,他發現已經到達目的點,此時current_error=0,大腦經過思考得出current_error—last_error=0 - 40=-40,兩腳獲得的能量Δ=40+(-40)=0,即他已經達到目的地,無需再跑。在剛才的敘述中,可知增量式P+I+D輸出的是一個增量,將該增量與調節量相加后所得到值才是最終輸出量,其反應的是之前的輸出量是在當前的狀態中是該增加還是該減少。
二、純比例控制P=Kp*(current_error﹣last_error),怎樣理解﹙current_error﹣last_error ﹚?
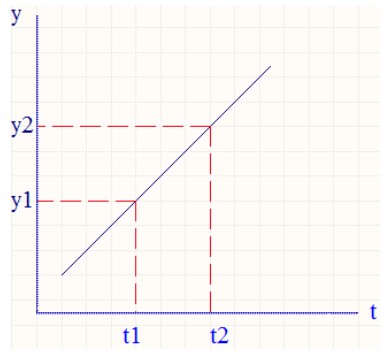
PID中純比例控制就是把被控制量的偏差乘以一個系數作為調節器的輸出,在增量式PID中,反映在程序上的,我們被控制量就是error,而實際上,例如在速度控制中error=目標速度﹣當前速度,所以明確目的:我們通過控制error趨近于0,最終使得當前速度趨近于目標速度。
如上圖,函數經過時間Δt,由y1變化為y2時,問y增長的比例為多少?很顯然:K=﹙y2-y1﹚/Δt;
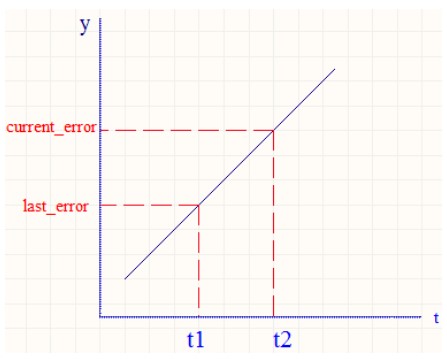
以速度控制為例,若y為error,如上圖,在時間t1到t2的過程中,我們可以得到輸出控制量error變化的趨勢為(current_error - last_error)/Δt。得到偏差的變化趨勢后,乘以Kp使輸出量與error相對變化。這個道理猶如模擬電子電路中,聲音信號經過功放管放大輸出的信號與輸入信號相對應的線性變化。
三、引進微分控制?
然而,通常情況下,我們的被控制量并非純比例式地變化,如下圖:
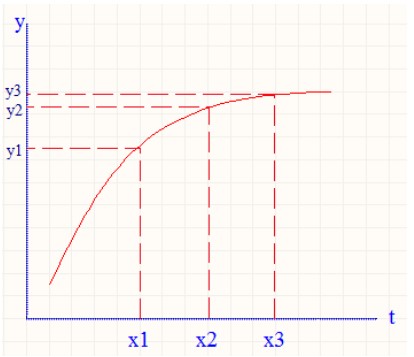
比例表示變化趨勢,微分則表示變化趨勢的變化率,映射到一個圖像曲線中即為導數的變化!上圖中若求曲線中x2至x1某點的斜率,當Δt足夠小時,則可近似為(y2 - y1)/Δt ,可知x3到x1導數的變化為﹛(y3 - y2) -(y2 - y1)﹜/Δt =(y3 - 2*y2﹢y1)/Δt 。將不同時間的y1、y2、y3映射為prev_error、last_error、current_error;則error變化趨勢的變化為﹛(current_error - last_error) - (last_error - prev_error)﹜/Δt=﹛﹙current_error - 2*last_error﹢prev_error﹚﹜/Δt,可得微分D=Kd*(current_error﹣2*last_error﹢prev_error)。在系統中加入微分反映系統偏差信號的變化率,能預知偏差變化的趨勢,具有超前控制作用,提前處理偏差。
四、引進積分控制?
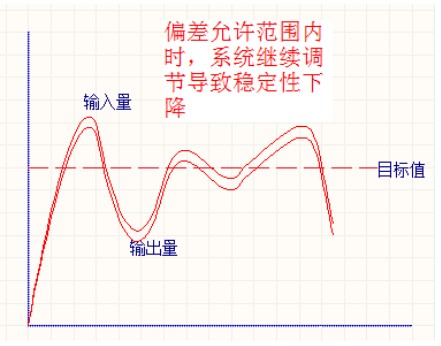
積分控制可以消除偏差,體現在公式中較容易理解,當前的偏差差經過系數Ki的放大后映射為輸出控制量,即I=Ki*current_error。P只要前后偏差之差為0,即current_error - last_current=0,則不進行調節,D只要前后偏差變化率為0,即(current_error﹣2*last_error﹢prev_error)=0,則不進行調節。而對于積分只要偏差存在,調節就始終進行,因此積分可以消除誤差度,但在在某些情況下,一定范圍內的誤差是允許的,而如果此時積分調節始終存在,可能會導致系統穩定性下降,如上圖,此時可通過弱化積分系數Ki使系統穩定。
審核編輯:劉清
-
傳感器
+關注
關注
2564文章
52711瀏覽量
764643 -
PID
+關注
關注
37文章
1480瀏覽量
87536 -
智能車
+關注
關注
21文章
409瀏覽量
77460 -
調節器
+關注
關注
5文章
876瀏覽量
47463
發布評論請先 登錄






 工商網監
工商網監
評論