 KUKA機器人高級編程- 全局變量的應用舉例
KUKA機器人高級編程- 全局變量的應用舉例
使變量、常數、信號、用戶數據類型全局可用
可通過數據列表或通過 $CONFIG.DAT 使變量、信號和自定義數據類型全局可用。
常數必須始終在數據列表中進行聲明并同時初始化。因此,只能通過數據列表使其全局可用。
通過數據列表使對象全局可用:
1. 在程序頂部的數據列表中添加關鍵詞 PUBLIC:
DEFDAT MY_PROG PUBLIC
2. 在協議時使用關鍵詞 GLOBAL。
示例 (變量的協議):
DEFDAT MY_PROG PUBLIC
DECL GLOBAL INT counter
...
ENDDAT
只有在數據列表中已經協議了變量、信號和自定義數據類型時,才能將 GLOBAL 用于它們。
PUBLIC 只用于在此所述的用途,即在數 據列表中與 GLOBAL 確定的數據對象一起使其全局可用。PUBLIC 單獨無作用。
$CONFIG.DAT ?
在段落 USER GLOBALS 的 $CONFIG.DAT 中聲明該對象。關鍵詞 GLOBAL 在此不需要,在此也不使用。
在 $CONFIG.DAT 中不允許使用用關鍵詞 GLOBAL 在數據列表中定義的數據類型。
示例:
在 DEFDAT PROG() 中已經用關鍵詞 GLOBAL 定義了計數類型 SWITCH_TYP:DEFDAT PROG()
GLOBAL ENUM SWITCH_TYP ON, OFF
...
如果在 $CONFIG.DAT 中使用該數據類型,則編譯器報告錯誤 “類型未知:***DECL SWITCH_TYP MY_VAR ”。
DEFDAT $CONFIG
DECL SWITCH_TYP MY_VAR
...
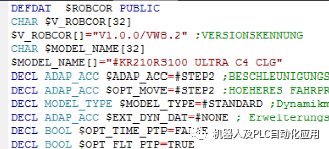
VASS標準中的例子:
全局關鍵詞PUBLIC的應用。
$ROBCOR全局文件的使用:
$MACHINE全局文件的使用:
審核編輯 :李倩
-
變量
+關注
關注
0文章
614瀏覽量
28846 -
數據類型
+關注
關注
0文章
237瀏覽量
13839
原文標題:KUKA機器人高級編程- 全局變量的應用舉例
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
盤點#機器人開發平臺
庫卡KUKA機器人常見故障維修
使用 Thonny 對 XRP 機器人進行編程


【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
自變量機器人宣布完成Pre-A與Pre-A+輪融資
工業機器人的四種編程(示教編程、離線編程、自增強現實編程主編程)剖析!






 工商網監
工商網監
評論