") 對Autosar網(wǎng)絡(luò)管理的一些表述進(jìn)行糾錯
對Autosar網(wǎng)絡(luò)管理的一些表述進(jìn)行糾錯
糾錯1
Autosar網(wǎng)絡(luò)管理:網(wǎng)絡(luò)管理報(bào)文的收/發(fā)與網(wǎng)絡(luò)管理時間配置參數(shù)解析
一文中,提到這樣一個觀點(diǎn)“3.有快速發(fā)送功能(網(wǎng)絡(luò)被動喚醒):在RMS狀態(tài)下,先以快發(fā)周期發(fā)送一定次數(shù)的網(wǎng)絡(luò)管理報(bào)文,eg:20ms發(fā)送10次,之后以正常周期發(fā)送網(wǎng)絡(luò)管理報(bào)文,eg:500ms。”此處表達(dá)不準(zhǔn)確,收到網(wǎng)絡(luò)管理報(bào)文(沒有PN功能),被動喚醒(調(diào)用CanNm_PassiveStartUp()接口),沒有快發(fā)模式。
即:被動喚醒沒有快發(fā)模式。快發(fā)模式需要滿足的條件:
節(jié)點(diǎn)非PASSIVE MODE;
調(diào)用CanNm_NetworkRequest()接口主動請求網(wǎng)絡(luò);
CanNmImmediateNmTransmissions>0。
看一下Autosar規(guī)范給的解釋,如下所示:
CASE1:
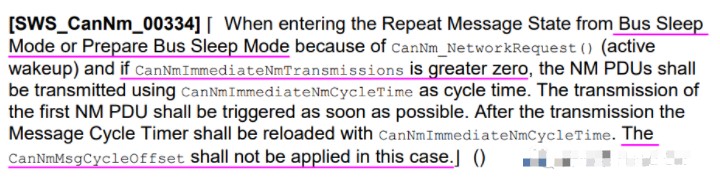
可以看出,由BSM或者PBSM進(jìn)入RMS,由CanNm_NetworkRequest()觸發(fā),且CanNmImmediateNmTransmissions>0時,使能快發(fā)模式。
CASE2:
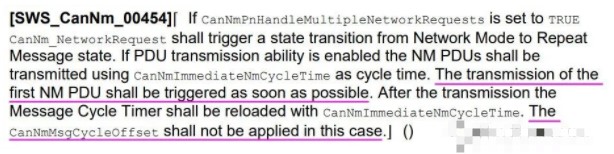
CanNmPnHandleMultipleNetworkRequests = TRUE,可以理解為PN功能使能,調(diào)用CanNm_NetworkRequest()接口進(jìn)入RMS狀態(tài)時,CanNmImmediateNmTransmissions>0,使能快發(fā)模式。
注意:
CanNmImmediateNmTransmissions設(shè)置為1,沒有意義,工程需求中,常見設(shè)置:10、20等;
CanNmRepeatMessageTime > CanNmImmediateNmTransmissions * CanNmImmediateNmCycleTime,即:快發(fā)模式限于RMS狀態(tài);
快發(fā)功能使用時,CanNmMsgCycleOffset不再適用,既然都快發(fā)了,就是想快速喚醒網(wǎng)絡(luò),所以,沒必要再延遲發(fā)送NM Msg。
糾錯2
工程開發(fā)問題(七):Flexray網(wǎng)絡(luò)狀態(tài)切換錯誤,通信異常一文中,說到:“Fr節(jié)點(diǎn)進(jìn)入RSS狀態(tài)以后,即使本節(jié)點(diǎn)有內(nèi)部網(wǎng)絡(luò)請求(Network Request,比如:VFC置位),節(jié)點(diǎn)也不會進(jìn)入NOS狀態(tài)。”,該表達(dá)不準(zhǔn)確。完整的解讀Autosar規(guī)范如下所示:
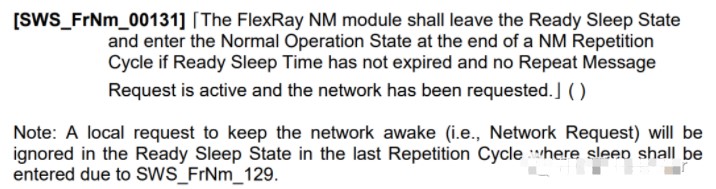
意思是說,F(xiàn)lexray節(jié)點(diǎn)在RSS狀態(tài)下,如果同時滿足如下條件:
FrNm_ReaySleepCnt>0;
FrNm_NetworkRequest=TRUE,主動調(diào)用FrNm_NetworkRequest()接口;
FrNM_RepeatMessage=FALSE。
在當(dāng)前Repetition Cycle結(jié)束后,F(xiàn)lexray節(jié)點(diǎn)的網(wǎng)絡(luò)狀態(tài)由RSS進(jìn)入NOS狀態(tài)。
網(wǎng)絡(luò)管理問題QA
Q1:Application軟件升級,$11復(fù)位后,節(jié)點(diǎn)處于何種網(wǎng)絡(luò)狀態(tài)?
A1:本問題源于一個朋友的討論。在此,說一下個人理解。正常的刷寫流程中,一般操作如下:
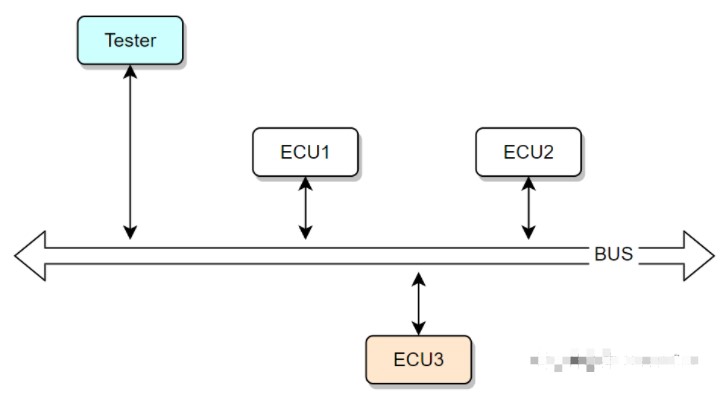
Step1:拓展會話($10 03)中,使用功能尋址將總線上的所有節(jié)點(diǎn)通信(0x28服務(wù))和DTC監(jiān)控(0x85服務(wù))禁用,功能尋址一直在周期性發(fā)送$3E 80(維持會話);
Step2:使用物理尋址升級目標(biāo)ECU(進(jìn)入編程會話,$10 02),比如:下圖的ECU3;
Step3:ECU3升級完成以后,使用物理尋址發(fā)送$11 01服務(wù),復(fù)位ECU3;
Step4:等待一定時間(比如:2s),功能尋址發(fā)送$10 03服務(wù),使ECU3進(jìn)入拓展會話;
Step5:再等待一定時間(比如:2s),功能尋址發(fā)送$28服務(wù),使能所有節(jié)點(diǎn)通信;......
具體解釋:
Step3中,發(fā)送$11 01使ECU3復(fù)位,ECU3執(zhí)行復(fù)位,由Boot跳轉(zhuǎn)到Application,Application程序初始化,Application程序運(yùn)行起來,需要一定時間,這是上位機(jī)(Tester)延遲2s的作用(確保Application程序已經(jīng)完成初始化動作),這個時間內(nèi)ECU3節(jié)點(diǎn)網(wǎng)絡(luò)處于BSM(Bus Sleep Mode)模式;Step4中,功能尋址發(fā)送$10 03服務(wù),主要使ECU3進(jìn)入拓展會話。在升級ECU3的過程中,由于Tester一直周期性發(fā)送$3E 80(避免因S3超時,ECU1、ECU2進(jìn)入默認(rèn)會話,使得通信和DTC控制失效),ECU1和ECU2一直在拓展會話呆著。Step5中,又經(jīng)過2s時間,Tester發(fā)送$28 00服務(wù),開啟通信。提示:
$28服務(wù)針對非診斷報(bào)文的通信
(比如:網(wǎng)絡(luò)管理報(bào)文、應(yīng)用報(bào)文),主要是把總線讓給診斷報(bào)文,提高刷寫速率。所以,ECU3只要完成啟動流程,Controller和Transceiver進(jìn)入Normal模式,ECU3就可以正常接收診斷報(bào)文。如果開發(fā)的ECU要求
網(wǎng)絡(luò)管理報(bào)文喚醒網(wǎng)絡(luò),此時ECU3節(jié)點(diǎn)的網(wǎng)絡(luò)狀態(tài)處于何種模式呢?答:個人理解,BSM。雖然上位機(jī)從請求ECU復(fù)位到發(fā)送$28服務(wù)(開通信)間隔了4s時間,但是這4s時間內(nèi)有一定的時間ECU在完成初始化(一般要求100~300ms時間范圍)。
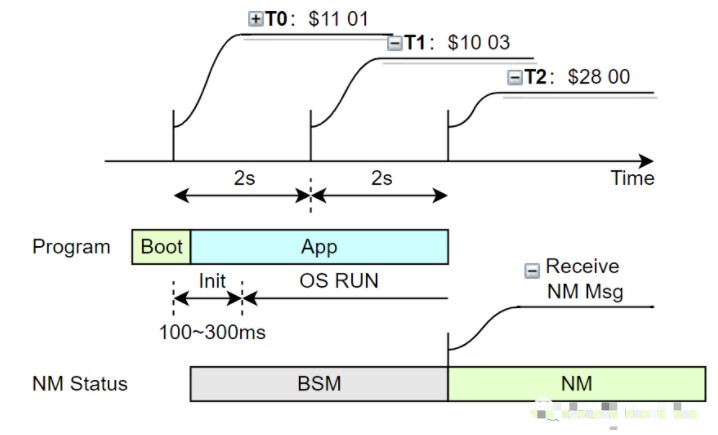
如上圖:T0時刻,ECU3收到$11 01復(fù)位,一般程序會在Boot呆一定時間,比如:50ms(Stay In Boot功能),之后識別到App程序有效,Jump到App,完成App初始化,在OS RUN之前需要100~300ms時間不等(每個項(xiàng)目的代碼量和功能有所不同,耗時不同)。
到T2時刻使能通信之前的這段時間,ECU3處于BSM模式,原因:沒有收到有效的喚醒事件(比如:沒有收到網(wǎng)絡(luò)管理報(bào)文)。注意:
ECU1和ECU2一直處于NM(Network Mode),因?yàn)樵\斷報(bào)文在一直維持兩者的網(wǎng)絡(luò)狀態(tài)。
T2時刻,ECU1和ECU2的通信使能,可以發(fā)送網(wǎng)絡(luò)管理報(bào)文和應(yīng)用報(bào)文,ECU3接收到網(wǎng)絡(luò)管理報(bào)文以后,進(jìn)入NM,ECU3相當(dāng)于被動喚醒。
所以,從ECU3復(fù)位,到接收到$28 00服務(wù),近4s的時間內(nèi),ECU3的網(wǎng)絡(luò)狀態(tài)處于BSM模式。
注意:
再次提醒:不要混淆ECU喚醒和網(wǎng)絡(luò)喚喚醒。雖然ECU3收到診斷報(bào)文,可以處理診斷服務(wù),但是診斷報(bào)文并不是有效的喚醒源,如果Transceiver沒有硬件過濾功能,診斷報(bào)文可以將ECU喚醒(uC被供電),但是網(wǎng)絡(luò)并未喚醒,此時ECU會保持一定時間驗(yàn)證喚醒事件的有效性,比如:3s等;
有些節(jié)點(diǎn)的Transceiver有過濾功能,即:只能有效的網(wǎng)絡(luò)管理報(bào)文被接收,所以,冷啟動時,診斷報(bào)文,ECU接收不到;
某些ECU的開發(fā)中,會將診斷報(bào)文作為有效喚醒源,即:網(wǎng)絡(luò)管理報(bào)文一樣,可以喚醒網(wǎng)絡(luò),診斷報(bào)文和注意識別。
$11 01診斷服務(wù)思考
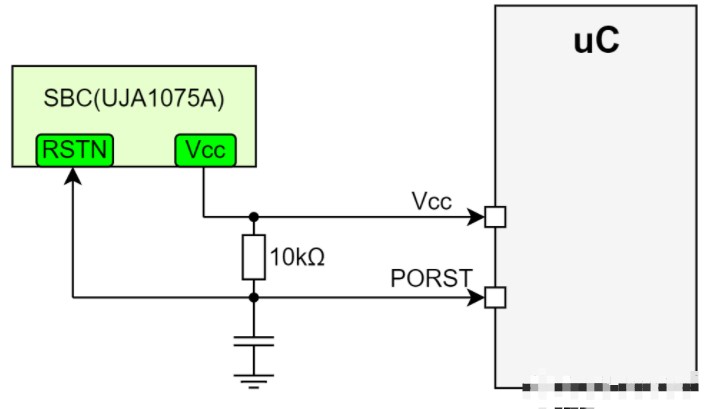
工程中,ECU刷寫后,需要$11 01執(zhí)行uC的復(fù)位,這個復(fù)位可以操作PORST Pin,控制uC的Vcc供電(5V),使得uC完成一個熱啟動過程,即:ECU復(fù)位。注意,這個復(fù)位動作,雖然也給uC重新供電,但是,它不同于KL15硬線上電,不能看作主動喚醒,所以$11 01診斷復(fù)位不能觸發(fā)網(wǎng)絡(luò)的主動喚醒。
提示:$11 01復(fù)位,執(zhí)行uC的下電流程,需要執(zhí)行NVM的存儲。
如下通過控制SBC(System Basis Chip)實(shí)現(xiàn)uC復(fù)位,也可以通過控制外部看門狗實(shí)現(xiàn)。
審核編輯:劉清
-
網(wǎng)絡(luò)管理
+關(guān)注
關(guān)注
0文章
123瀏覽量
28033 -
AUTOSAR
+關(guān)注
關(guān)注
10文章
370瀏覽量
22376 -
RMS
+關(guān)注
關(guān)注
2文章
149瀏覽量
36448
發(fā)布評論請先 登錄
Debian和Ubuntu哪個好一些?
如何添加一些網(wǎng)絡(luò)上的庫到mpy固件的說明或手冊教程?
收藏的一些庫存,直流無刷技術(shù)+源碼+論文(建議打包)
光庭信息榮獲AUTOSAR中國中心2024年度特別貢獻(xiàn)獎
AUTOSAR通信與網(wǎng)絡(luò)安全 AUTOSAR通信在車輛中的應(yīng)用
AUTOSAR中通信堆棧的配置 AUTOSAR通信模塊測試方法
AUTOSAR通信框架的優(yōu)勢 AUTOSAR通信實(shí)例與應(yīng)用場景
AUTOSAR通信與CAN協(xié)議的關(guān)系
AUTOSAR通信組件介紹 AUTOSAR通信層功能分析
AUTOSAR通信協(xié)議解析 如何實(shí)現(xiàn)AUTOSAR通信
一些常見的動態(tài)電路
分享一些常見的電路
節(jié)能攻略,AUTOSAR PN局部網(wǎng)絡(luò)管理技術(shù)!

LED驅(qū)動器應(yīng)用的一些指南和技巧

首款支持AUTOSAR車規(guī)MCU亮相AUTOSAR中國日






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論