 AUTOSAR通信協議解析 如何實現AUTOSAR通信
AUTOSAR通信協議解析 如何實現AUTOSAR通信
AUTOSAR(Automotive Open System Architecture)即汽車開放系統架構,該架構支持汽車電子控制單元(ECU)之間的通信,實現了高度模塊化和可重用性。AUTOSAR通信協議棧是一個復雜的系統,它涵蓋了多種通信方式和模塊,以實現車內ECU之間的高效、可靠的數據交換。以下是對AUTOSAR通信協議的解析及實現AUTOSAR通信的方法:
一、AUTOSAR通信協議解析
- 通信服務組成部分
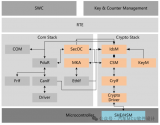
AUTOSAR通信協議棧主要由以下幾個模塊組成:- Com模塊 :為應用程序提供基于信號的數據服務的接口,并根據信號自身預定義的發送類型來發送報文。為了支持應用程序的復雜類型(如結構體),Com模塊還定義了信號組的概念,并提供了附加的服務接口,用于檢測是否成功發送、接收報文以及報文是否超時等。對于多個通信通道的ECU,Com模塊還提供了一個用于不同通信總線之間的信號路由(即信號網關)的功能。
- Dcm模塊 :根據ISO 14229-1(Unified diagnostic services即UDS)實現診斷通信。診斷請求分為兩部分:一部分被直接送往Dcm模塊(包括診斷會話的管理、讀取故障碼、重啟ECU等);另一部分通過配置的端口轉發到對應的軟件組件(讀、寫、數據標志控制、例程執行等)。
- PduR模塊 :提供PDU的路由功能,實現PDU在不同總線系統或不同通信控制器之間的傳輸。
- IpduM模塊 :負責支持對PDU的多重使用。通過與PduR交互,IpduM模塊可以實現PDU的復用,從而節省報文ID等資源,提高通信效率。
- TP模塊 :負責大協議數據單元的拆包和組包。TP模塊將大PDU拆分成多個小的幀進行傳輸,并在接收端將這些小的幀重新組合成原始的PDU。這確保了數據能夠在不同的總線系統上有效、可靠地傳輸。
- If模塊 :使用驅動層的基于幀的服務,向上提供PDU的發送和接收服務。同時,If模塊通過PDU和硬件緩沖區的映射提供硬件緩沖區的復用功能。
- 通信關鍵技術
- 分層模型機制 :AUTOSAR通信協議棧采用分層模型,每一層都有其特定的功能和協議數據單元(PDU)。這種分層設計使得通信協議棧更加靈活和可擴展。
- 通信路徑分配機制 :AUTOSAR通信協議棧通過配置和路由表來分配通信路徑,確保數據能夠按照預定的路徑進行傳輸。
- 基于信號的通信路徑 :AUTOSAR通信協議棧支持基于信號的通信路徑,即數據以信號的形式在ECU之間進行傳輸。這使得數據的傳輸更加靈活和高效。
- PDU ID映射機制 :AUTOSAR通信協議棧通過PDU ID映射機制來確保不同ECU之間能夠正確識別和解析接收到的數據。
二、實現AUTOSAR通信的方法
- ECU間通信
ECU間通信主要通過預定義的通信協議棧(如CAN、LIN、FlexRay等)進行。開發者需要配置相應的通信參數(如波特率、數據位長度等),并通過通信協議棧提供的API進行數據的發送和接收。例如,在CAN總線上發送數據時,可以使用CanIf_Transmit函數將數據封裝成CAN消息并發送出去。 - OS-Application內SWC間的通信
在同一個OS-Application內,SWC(Software Component)間的通信主要通過RTE(Runtime Environment)進行處理。RTE提供了SWC間通信的接口和機制,使得SWC能夠按照預定的方式進行數據交換。這種通信方式通常具有較高的效率和可靠性。 - OS-Application間的通信
OS-Application間的通信相對復雜一些,因為不同的OS-Application可能運行在不同的核上,并且受到內存保護邊界的限制。為了實現OS-Application間的通信,AUTOSAR提供了IOC(Inter-OS-Application Communication)機制。IOC通過配置SWC端口和映射關系,實現了不同OS-Application之間的數據交換。在使用IOC時,需要注意數據一致性和Spinlock的使用,以避免死鎖等問題的發生。
此外,在實現AUTOSAR通信時,還需要注意以下幾點:
- 通信協議的選擇 :根據應用場景和需求選擇合適的通信協議(如CAN、LIN、FlexRay等)。不同的通信協議具有不同的特點和適用范圍。
- 通信參數的配置 :正確配置通信參數(如波特率、數據位長度、校驗方式等),以確保數據的正確傳輸和接收。
- 通信數據的處理 :在發送和接收數據時,需要進行相應的數據處理(如數據封裝、解封裝、校驗等),以確保數據的完整性和正確性。
- 通信故障的處理 :在通信過程中,可能會遇到各種故障(如總線故障、節點故障等)。因此,需要設計相應的故障處理機制來應對這些故障,確保系統的穩定性和可靠性。
綜上所述,實現AUTOSAR通信需要深入理解AUTOSAR通信協議棧的結構和工作原理,并根據應用場景和需求選擇合適的通信方式和模塊。同時,還需要注意通信參數的配置、通信數據的處理以及通信故障的處理等方面的問題。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
通信協議
+關注
關注
28文章
915瀏覽量
40440 -
接口
+關注
關注
33文章
8691瀏覽量
151919 -
AUTOSAR
+關注
關注
10文章
363瀏覽量
21779 -
控制單元
+關注
關注
0文章
77瀏覽量
12848
發布評論請先 登錄
相關推薦
總線通信協議解析及應用
在現代計算機系統中,總線通信協議扮演著至關重要的角色。它們定義了數據如何在處理器、內存、輸入/輸出設備等組件之間傳輸。 總線通信協議的基本概念 總線通信協議是一組規則,它規定了數據在系統總線上的傳輸
AUTOSAR通信對自動駕駛的影響 AUTOSAR通信與嵌入式系統設計
,AUTOSAR通信與嵌入式系統設計緊密相連,共同推動著自動駕駛技術的發展。 AUTOSAR通信對自動駕駛的影響 提高通信效率和可靠性
AUTOSAR通信與網絡安全 AUTOSAR通信在車輛中的應用
隨著汽車行業的發展,車輛的電子化和智能化水平不斷提高,這使得車輛的通信系統變得日益復雜。AUTOSAR(AUTomotive Open System ARchitecture)是一個全球性的汽車軟件
AUTOSAR通信實現中的常見問題
AUTOSAR(Automotive Open System Architecture)汽車開放系統架構旨在實現汽車電子的軟硬件分離,降低ECU軟件開發的復雜度,提高軟件可重用性。 一、通信協議棧
AUTOSAR中通信堆棧的配置 AUTOSAR通信模塊測試方法
)的開發和生產。通信堆棧是AUTOSAR架構中的關鍵組成部分,負責處理ECU之間的通信。 AUTOSAR中通信堆棧的配置
AUTOSAR通信框架的優勢 AUTOSAR通信實例與應用場景
的一些主要優勢: 標準化 :AUTOSAR通信框架提供了一套標準化的接口和協議,這有助于不同供應商之間的軟件組件
AUTOSAR通信與CAN協議的關系
AUTOSAR通信模型: AUTOSAR定義了一個分層的軟件架構,其中包括應用層、基礎軟件層和微控制器抽象層。在這些層中,通信模型是實現EC
AUTOSAR通信組件介紹 AUTOSAR通信層功能分析
實現汽車電子控制單元(ECU)的軟件設計和開發。這個架構包括多個層,其中通信層是AUTOSAR架構中的關鍵組成部分之一。 1. 通信組件概述 AUT
串口通信協議解析 串口通信應用實例
串口通信協議解析 串口通信協議是指規定了數據包的內容,內容包含了起始位、主體數據、校驗位及停止位,雙方需要約定一致的數據包格式才能正常收發數據的有關規范。以下是串口通信協議的介紹: 基
PLC控制系統的通信協議解析
在現代工業自動化中,PLC控制系統扮演著至關重要的角色。它們不僅需要處理復雜的邏輯控制任務,還需要與其他系統和設備進行通信。為了實現這一目標,PLC系統必須遵循一系列的通信協議。 PLC通信協
AUTOSAR解決方案 — INTEWORK-EAS-AP
經緯恒潤自主研發的Adaptive AUTOSAR平臺產品, 遵循AUTOSAR Adaptive R19-11和R22-11規范, 使用C++11、C++17語言開發。可通過極易上手的自研工具配置,實現

PROFINET通信協議是什么
PROFINET通信協議是一種專為工業自動化領域設計的基于以太網的實時通信協議。以下是對PROFINET通信協議的詳細解析,包括其定義、特點、體系結構、工作原理、
UART串口通信協議是什么?
UART (Universal Asynchronous Receiver/Transmitter) 是一種通信接口協議,用于實現串口通信。它是一種簡單的、可靠的、廣泛應用的串口
CP AUTOSAR信息安全機制全面解析
這個模塊一定是我們工程師最先接觸到的AUTOSAR信息安全機制,主要用于ECU板級的安全通信。 大家應該有印象,在以往沒有該機制,CAN通信通常是使用Checksum和RollingCounter來檢驗是否掉幀或者漏幀,并沒有一
AUTOSAR平臺研究報告:國產基礎軟件+芯片全棧方案加快量產
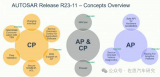
2023年12月7日,AUTOSAR組織發布了最新版本AUTOSAR R23-11標準,從功能角度方面,更新主要集中在信息安全、功能安全以及通信協議棧等三個方面。





 工商網監
工商網監
評論