 CAN總線網絡拓撲結構設計
CAN總線網絡拓撲結構設計
【摘要】本文將CAN總線技術運用到汽車車身線束設計中,并對整車系統總體結構、CAN數據傳輸方式和控制過程進行了詳細描述,并完成節點電路設計、線束走向設計。
前言
電動汽車各個模塊之間的交互有效性直接影響了汽車的行駛效率和駕駛感。而插電式混合動力汽車根據電力驅動系統和發動機動力系統的布局形式可以分為3類:串聯式、并聯式、串-并聯混合式。該文探討的是并聯式混合動力系統方案,它具有對原車技術模塊化,實施性方便,適用性廣特點。
術語
節點:連接在通訊網絡上,能夠按照某一通訊協議通過網絡進行通訊的設備的集合。
總線電壓:總線電壓是CAN總線的CAN_H或者CAN_L 對各自CAN節點地的電壓。
CAN總線網絡拓撲結構設計
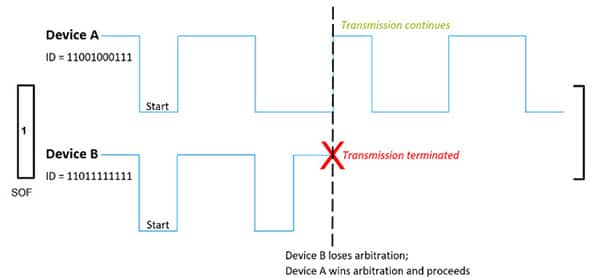
CAN總線是一種多主總線,一旦有總線閑置,任意一個CAN節點均可向總線發送數據。CAN總線通道中優先發報文的節點取決于無損逐位仲裁的方式, 此方式可以節省沖突時間, 尤其是在網絡負載很重的情況下也可以流暢運行,可以保證信號通道的利用率,提高整個系統的實時性。
而針對插電式混合動力汽車的控制系統,需要對其整車控制模塊(HCU)和動力系統、安全系統進行詳細的分層及規劃。
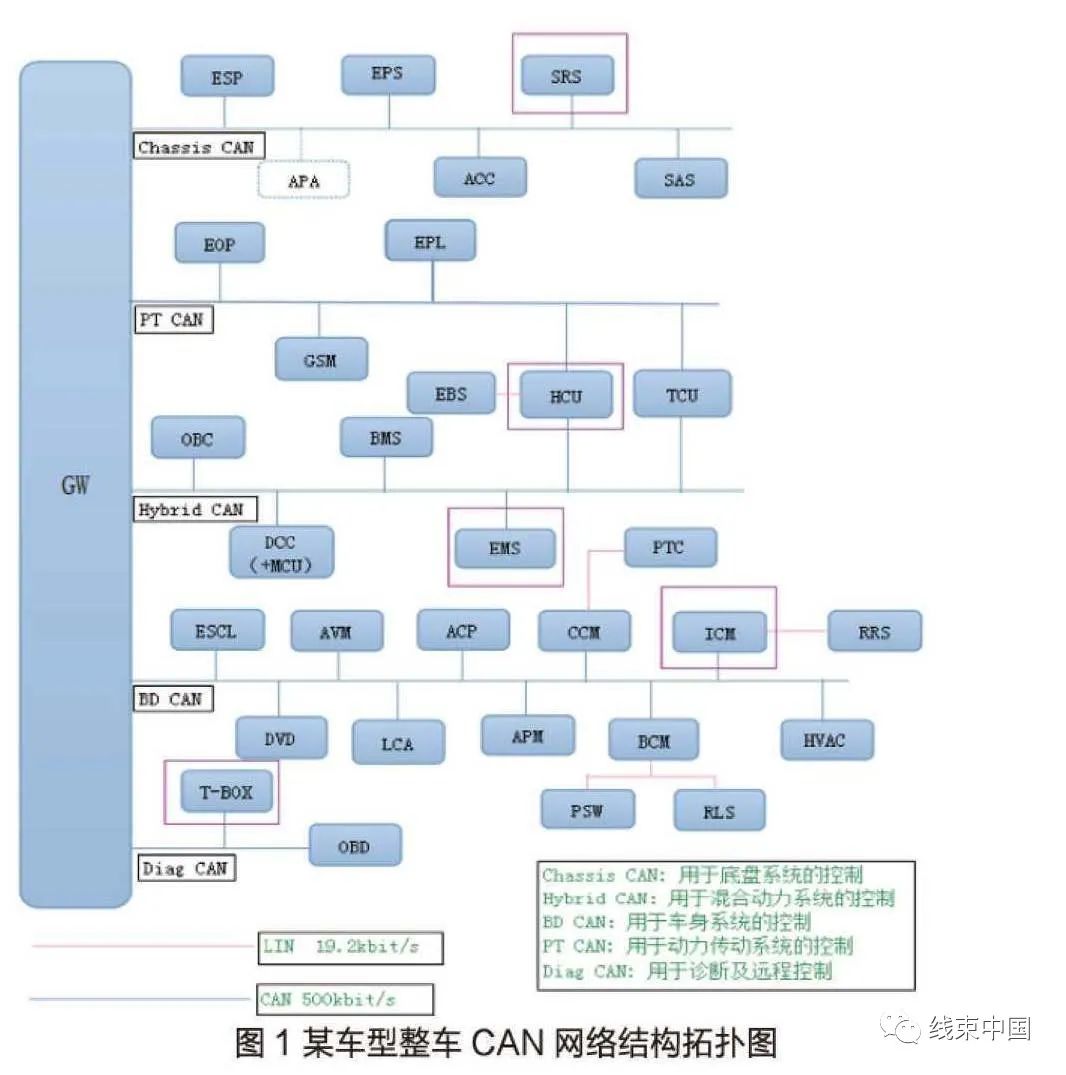
一般情況下,通訊網絡的拓撲結構種類多,支線復雜繁瑣,而總線往往檢測矯正能力較強,實施信號好,可靠性有保證,能夠有效地判斷錯誤節點和自動校正簡單錯誤,所以將通信網絡設計成總線型CAN網絡結構可以滿足信息傳遞及時性和可靠性的要求。根據系統分層控制的原理,設計并聯式混合動力CAN通訊結構拓撲圖,如圖1 所示。
線束布局設計原則
4.1線束要求
線束布局設計要求網絡中多個車載ECU和離線工具,具體詳見圖2。
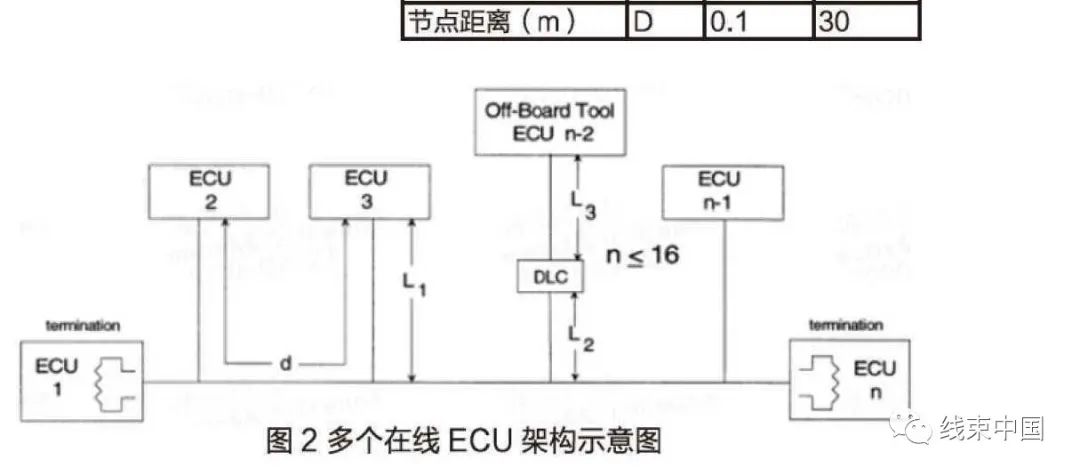
對于CAN線束設計,一般要求如下幾點:
1) CAN總線總長度<40m;
2) ECU間距<20m;
3) ECU節點數量<20個;
4) 線束使用屏蔽線(高速CAN)或者雙絞線(低速CAN);
5) 線束要求支線必須盡可能短;診斷節點直接與總線相連,端口長度應該盡可能短,要求最長為lm。從連接器中診斷儀之間的連線也應該盡可能短,最長不超過5m。
6) CAN 線在布局線束時盡量保持走線順暢,避免出現CAN線回折現象。確保每條支線與主干線相接時,CAN_H 和CAN_L的連接點盡量保持在主干線的同一位置上。原則上各節點之間的節點距離D 不允許等長度, 應盡量遠離電源線和信號線, 且盡量避免平行走線;7)不要在干擾源附近布置CAN總線,如果無法避免,應使用屏蔽線。當使用屏蔽線時,屏蔽層必須在任一端接地( 或兩端屏蔽層接地)。整車線束中CAN線各個主干、支線長度的要求,如下表1:

為了避免電纜電源信號的干擾,CAN網絡的節點應盡量靠近干線。實際應用中應該盡可能使用短支線與總線連接,為了減少駐波,CAN網絡里的ECU不應該放置相等的距離并且電纜尾部不應全為相同德長度引線。
4.2 終端電阻
終端電阻可臨近放置于或放置于距離最長的而兩個在線ECU內。非終端ECU可選連接。根據標準要求,給CA N 總線上提供的終端電阻是60Ω,故整車CAN總線上最遠的兩個節點必須各有一個120Ω終端電阻(要求在CAN_H和CAN_L之間)。
終端電阻的大小分為要求為:110Ω-130Ω。典型值為:120Ω。
CAN線故障常見容錯性能
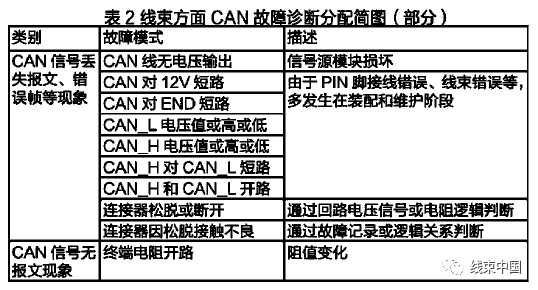
實際的CAN 檢測電路更復雜,首先要定好需要檢測的故障類型,然后根據故障類型設計檢測電路;故障類型如表2 所示。
結束語
綜上所述,根據插電式混合動力汽車的整車系統特點和功能要求,設計了混合動力汽車的整車CAN通訊系統,并以此為基礎確定了其網絡結構布局,依據通訊節點類型,設計了汽車有效地網絡拓撲結構圖,有效地滿足汽車對于網絡系統的設計要求,對插電式混合動力汽車的進一步發展具有十分重要的意義。
審核編輯 :李倩
-
混合動力汽車
+關注
關注
3文章
193瀏覽量
26858 -
CAN
+關注
關注
57文章
2900瀏覽量
467027 -
線束
+關注
關注
8文章
992瀏覽量
26413
原文標題:淺談PHEV車輛整車CAN線束布局設計
文章出處:【微信號:焉知連接器,微信公眾號:希驥知芯】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何評估CAN總線信號質量
BP神經網絡的網絡結構設計原則
采用 LLC 拓撲結構設計隔離式柵極驅動器電源,低成本 LLC 轉換器的設計指南
CAN總線模擬器的使用指南 CAN總線網絡的安全性分析
如何搭建CAN總線網絡 CAN總線故障診斷方法
使用CAN總線的注意事項 CAN總線與其他通信協議對比
CAN總線十萬個為什么 | 聊聊幾種常見的CAN網絡拓撲

CAN總線與LIN總線的區別
CAN-FD:CAN總線網絡第二章
CAN總線錯誤狀態的種類
Profinet轉CAN模塊介紹
5針M16接口結構設計

為什么CAN總線分支在0.3米內是最可靠的?





 工商網監
工商網監
評論