 光電編碼器的種類及工作原理
光電編碼器的種類及工作原理
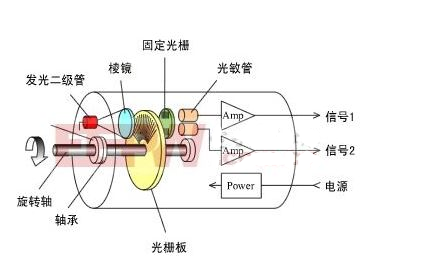
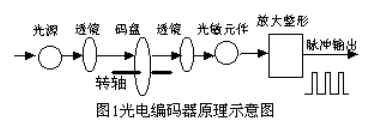
光電編碼器,是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器。這是目前應用最多的傳感器,光電編碼器是由光柵盤和光電檢測裝置組成。光柵盤是在一定直徑的圓板上等分地開通若干個長方形孔。由于光電碼盤與電動機同軸,電動機旋轉時,光柵盤與電動機同速旋轉,經發光二極管等電子元件組成的檢測裝置檢測輸出若干脈沖信號,其原理示意圖如圖1所示;通過計算每秒光電編碼器輸出脈沖的個數就能反映當前電動機的轉速。此外,為判定旋轉方向,碼盤還可提供相位相差90o的兩路脈沖信號。根據檢測原理,編碼器可分為光學式、磁式、感應式和電容式。根據其刻度方法及信號輸出形式,可分為增量式、盡對式以及混合式三種。
1、增量式編碼器
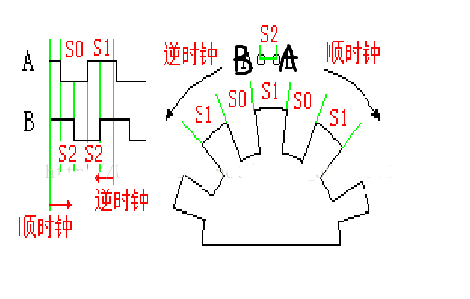
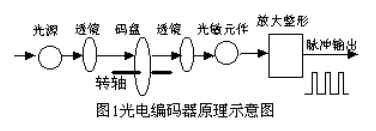
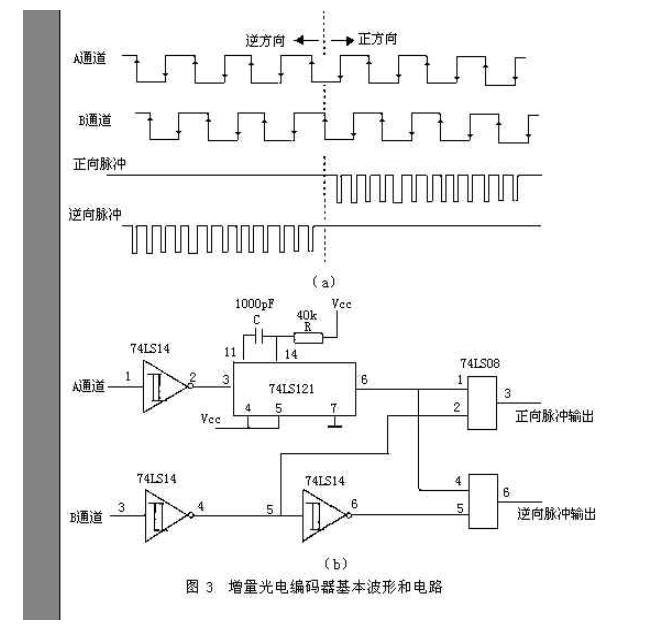
增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90o,從而可方便地判定出旋轉方向,而Z相為每轉一個脈沖,用于基準點定位。它的優點是原理構造簡單,機械均勻壽命可在幾萬小時以上,抗干擾能力強,可靠性高,適合于長間隔傳輸。其缺點是無法輸出軸轉動的盡對位置信息。
2、盡對式編碼器
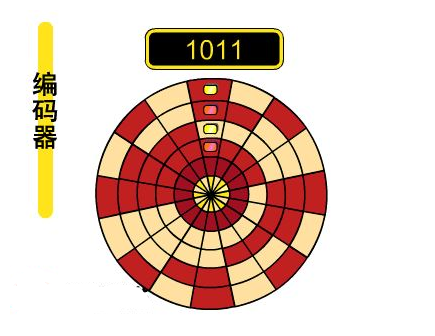
盡對編碼器是直接輸出數字量的傳感器,在它的圓形碼盤上沿徑向有若干同心碼道,每條道上由透光和不透光的扇形區相間組成,相鄰碼道的扇區數目是雙倍關系,碼盤上的碼道數就是它的二進制數碼的位數,在碼盤的一側是光源,另一側對應每一碼道有一光敏元件;當碼盤處于不同位置時,各光敏元件根據受光照與否轉換出相應的電平信號,形成二進制數。這種編碼器的特點是不要計數器,在轉軸的任意位置都可?讀出一個固定的與位置相對應的數字碼。顯然,碼道越多,分辨率就越高,對于一個具有?N位二進制分辨率的編碼器,其碼盤必須有N條碼道。目前國內已有16位的盡對編碼器產品。
3、混合式盡對值編碼器
混合式盡對值編碼器,它輸出兩組信息:一組信息用于檢測磁極位置,帶有盡對信息功能;另一組則完全同增量式編碼器的輸出信息。
光電編碼器是一種角度(角速度)檢測裝置,它將輸進給軸的角度量,利用光電轉換原理?轉換成相應的電脈沖或數字量,具有體積小,精度高,工作可靠,接口數字化等優點。它廣泛應用于數控機床、回轉臺、伺服傳動、機器人、雷達、軍事目標測定等需要檢測角度的裝置和設備中。
光電編碼器工作原理
根據原理的不同又可分為:增量型、絕對型和混合式增量型。
光電編碼器的主要工作原理為光電轉換,是一種通過光電轉換將輸出軸的機械幾何位移量轉換為脈沖或數字量的傳感器。光電編碼器主要由光柵盤和光電檢測裝置構成,在伺服系統中,光柵盤與電動機同軸致使電動機的旋轉帶動光柵盤的旋轉,再經光電檢測裝置輸出若干個脈沖信號,根據該信號的每秒脈沖數便可計算當前電動機的轉速。光電編碼器的碼盤輸出兩個相位差相差90度的光碼,根據雙通道輸出光碼的狀態的改變便可判斷出電動機的旋轉方向。
光電編碼器工作原理
增量式編碼器是將位移轉換成周期性的電信號,再把這個電信號轉變成計數脈沖,用脈沖的個數表示位移的大小,絕對式編碼器的每一個位置對應一個確定的數字碼,因此它的示值只與測量的起始和終止位置有關,而與測量的中間過程無關。
增量型編碼器:
光電編碼器工作原理
光電編碼器工作原理
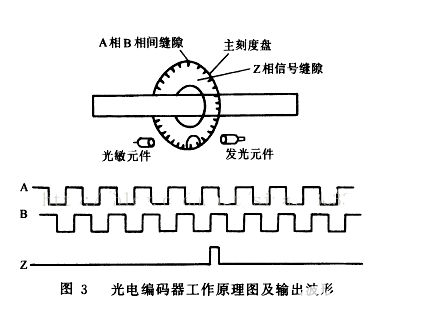
增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90o,從而可方便地判斷出旋轉方向,而Z相為每轉一個脈沖,用于基準點定位
旋轉增量式編碼器以轉動時輸出脈沖,通過計數設備來知道其位置,當編碼器不動或停電時,依靠計數設備的內部記憶來記住位置。這樣,當停電后,編碼器不能有任何的移動,當來電工作時,編碼器輸出脈沖過程中,也不能有干擾而丟失脈沖,不然,計數設備記憶的零點就會偏移,而且這種偏移的量是無從知道的,只有錯誤的生產結果出現后才能知道。
解決的方法是增加參考點,編碼器每經過參考點,將參考位置修正進計數設備的記憶位置。在參考點以前,是不能保證位置的準確性的。為此,在工控中就有每次操作先找參考點,開機找零等方法。比如,打印機掃描儀的定位就是用的增量式編碼器原理,每次開機,我們都能聽到噼哩啪啦的一陣響,它在找參考零點,然后才工作。
上面增加零點的方法對有些工控項目比較麻煩,甚至不允許開機找零(開機后就要知道準確位置),于是就有了絕對編碼器的出現。
絕對編碼器光碼盤上有許多道光通道刻線,每道刻線依次以2線、4線、8線、16線。。。。。。編排,這樣,在編碼器的每一個位置,通過讀取每道刻線的通、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進制編碼(格雷碼),這就稱為n位絕對編碼器。這樣的編碼器是由光電碼盤的機械位置決定的,它不受停電、干擾的影響。
絕對編碼器由機械位置決定的每個位置是唯一的,它無需記憶,無需找參考點,而且不用一直計數,什么時候需要知道位置,什么時候就去讀取它的位置。這樣,編碼器的抗干擾特性、數據的可靠性大大提高了。
絕對式編碼器:
絕對值編碼器為每一個軸的位置提供一個獨一無二的編碼數字值。
單圈絕對值編碼器把軸細分成規定數量的測量步,最大的分辨率為13位,這就意味著最大可區分8192個位置
光電編碼器工作原理
審核編輯:湯梓紅
-
傳感器
+關注
關注
2564文章
52668瀏覽量
764328 -
編碼器
+關注
關注
45文章
3780瀏覽量
137317 -
光電編碼器
+關注
關注
7文章
116瀏覽量
31749
發布評論請先 登錄





 工商網監
工商網監
評論