 視覺檢測之相機的選擇
視覺檢測之相機的選擇
1、相機的選擇
(1)工業數字相機的分類:
工業相機按照芯片類型可以分為CCD相機、CMOS相機;
按照輸出色彩可以分為單色(黑白)相機、彩色相機;
按照傳感器的結構特性可以分為線陣相機(黑白攝像機、3Line彩色相機、3CCD彩色相機(分光棱鏡)、面陣相機(黑白攝像機、Bayer彩色相機、3CCD彩色相機(分光棱鏡);
按照輸出信號方式可以分為模擬相機(PAL(黑白為CCIR))、NTSC(黑白為EIA))、數字相機(IEEE1394、USB2.0、Camera Link、GigE);
按照掃描方式可以分為隔行掃描相機、逐行掃描相機;
按照分辨率大小可以分為普通分辨率相機、高分辨率相機;
按照輸出信號速度可以分為普通速度相機、高速相機;
按照響應頻率范圍可以分為可見光(普通)相機、紅外相機、紫外相機等。
(2)相機的主要參數
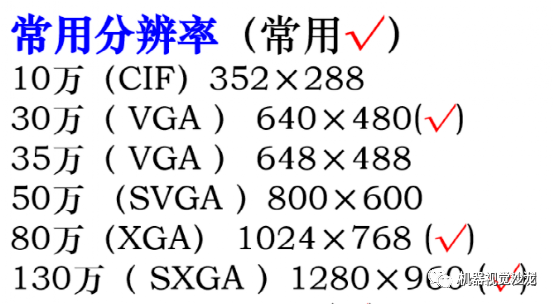
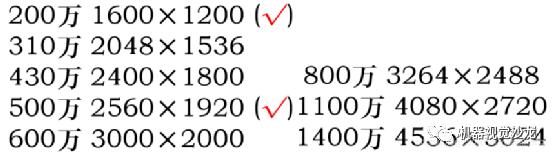
a.分辨率
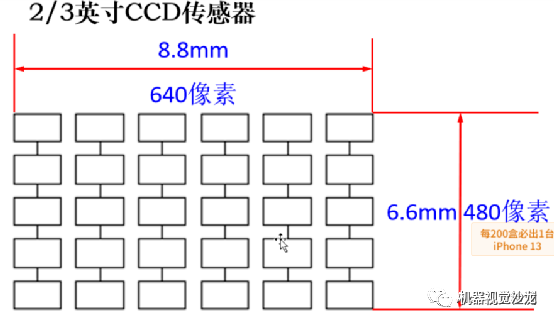
分辨率是相機最基本的參數,由相機所采用的芯片分辨率決定,是芯片靶面排列的像元數量。
通常面陣相機的分辨率用水平和垂直分辨率兩個數字表示,如:1920(H)x 1080(V),前面的數字表示每行的像元數量,即共有 1920 個像元,后面的數字表示像元的行數,即 1080 行。現在相機的分辨率通常表示多少 K,如1K(1024),2K(2048), 3K(4096)等。
在采集圖像時,相機的分辨率對圖像質量有很大的影響。在對同樣大的視場(景物范圍)成像時,分辨率越高,對細節的展示越明顯。
b.速度(最大幀率(Frame Rate)/行頻(Line Rate))
相機的幀頻/行頻表示相機采集圖像的頻率,通常面陣相機用幀頻表示,單位 fps(Frame Per second),如 30fps,表示相機在1秒鐘內最多能采集 30 幀圖像;線陣相機通常用行頻便是單位 KHz,如 12KHz 表示相機在1秒鐘內最多能采集 12000 行圖像數據。
相機采集傳輸圖像的速率,對于面陣相機一般為每秒采集的幀數(Frames/Sec.),對于線陣相機為每秒采集的行數(Lines/Sec.)。
速度是相機的重要參數,在實際應用中很多時候需要對運動物體成像。相機的速度需要滿足一定要求,才能清晰準確的對物體成像。相機的幀頻和行頻首先受到芯片的幀頻和行頻的影響,芯片的設計最高速度則主要是由芯片所能承受的最高時鐘決定。
c. 曝光方式(Exposure)和快門速度(Shutter)
對于線陣相機都是逐行曝光的方式,可以選擇固定行頻和外觸發同步的采集方式,曝光時間可以與行周期一致,也可以設定一個固定的時間;面陣相機有幀曝光、場曝光和滾動行曝光等幾種常見方式,數字相機一般都提供外觸發采圖的功能。
快門速度一般可到10微秒,高速相機還可以更快。
d.噪聲
相機的噪聲是指成像過程中不希望被采集到的,實際成像目標外的信號。
根據歐洲相機測試標準EMVA1288 中,定義的相機中的噪聲從總體上可分為兩類:一類是由有效信號帶來的符合泊松分布的統計漲落噪聲,也叫散粒噪聲(shot noise),這種噪聲對任何相機都是相同的,不可避免,有其確定的計算公式(噪聲的平方=信號的均值);第二類是相機自身固有的與信號無關的噪聲,它是由圖像傳感器讀出電路、相機信號處理與放大電路等帶來的噪聲,每臺相機的固有噪聲都不一樣。另外,對數字相機來說,對視頻信號進行模擬轉換時會產生量化噪聲,量化位數越高,噪聲越低。
e.信噪比
相機的信噪比定義為圖像中信號與噪聲的比值(有效信號平均灰度值與噪聲均方根的比值),代表了圖像的質量,圖像信噪比越高,圖像質量越好。(信噪比高的相機性能較好)
f.動態范圍
相機的動態范圍表明相機探測光信號的范圍,動態范圍可用兩種方法來界定,一種是光學動態范圍,指飽和時最大光強與等價于噪聲輸出的光強的比值,由芯片的特性決定。另一種是電子動態范圍,是指飽和電壓和噪聲電壓之間的比值。
對于固定相機其動態范圍是一個定值,不隨外界條件變化而變化。在線性響應處,相機的動態范圍定義為飽和曝光量與噪聲等效曝光量的比值:
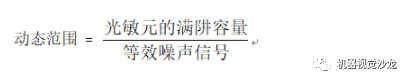
動態范圍可用倍數、dB 或 Bit 等方式來表示。動態范圍大,則相機對不同的光照強度有更強的適應能力。
g.像元/像素深度
數字相機輸出的數字信號,即像元灰度值,具有特殊的比特位數,稱為像元深度。即每像素數據的位數,一般常用的是8Bit,對于數字相機機一般還會有10Bit、12Bit、14Bit等。
對于黑白相機這個值的方位通常是 8-16bit。像元深度定義了灰度由暗道亮的灰階數。例如,對于 8bit 的相機 0 代表全暗而 255代表全亮。介于 0 和 255 之間的數字代表一定的亮度指標。10bit 數據就有 1024 個灰階,而 12bit 有 4096 個灰階。每一個應用我們都要仔細考慮是否需要非常細膩的灰度等級。從 8bit 上升到 10bit 或者 12bit 的確可以增強測量的精度,但是也同時降低了系統的速度,并且提高了系統集成的難度(線纜增加,尺寸變大),因此我們也要慎重選擇。
h.光譜響應
光譜響應是指相機對于不同波長光線的響應能力,通常指其所采用芯片的光譜響應。通常用光譜曲線表示,橫軸表示不同波長,縱軸表示量子效率。按照響應光譜不同也把相機分為可見光相機(400nm—1000nm,峰值在 500nm—600nm 之間),紅外相機(響應波長在 700nm 以上),紫外相機(可以響應到 200nm—400nm的短波),我們需要根據接收被測物發光波長的不同來選擇不同的光譜響應的相機。
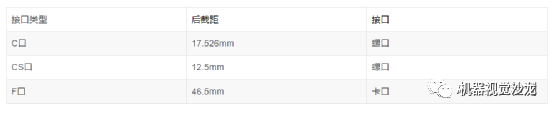
光學接口是指相機與鏡頭之間的借口,常用的鏡頭的借口有 C 口,CS 口,F 口。下表提供了關于鏡頭安裝及后焦距的信息。其中 M42 鏡頭適配器源于高端攝像標準。另一方面,相機的 Z 軸均依據所提供的適配器而進行了優化,一般情況下不要輕易拆卸鏡頭適配器。
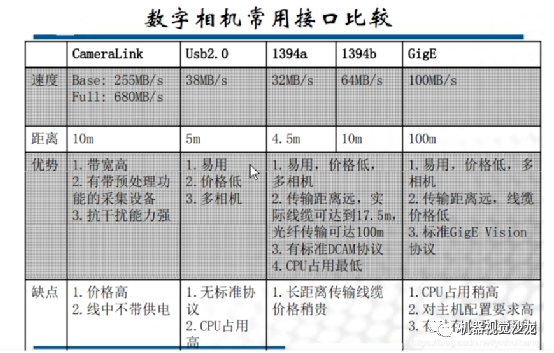
(3)工業數字攝像機主要接口類型
主要有:Usb2.0、IEEE 1394、CameraLink、GiggE等。
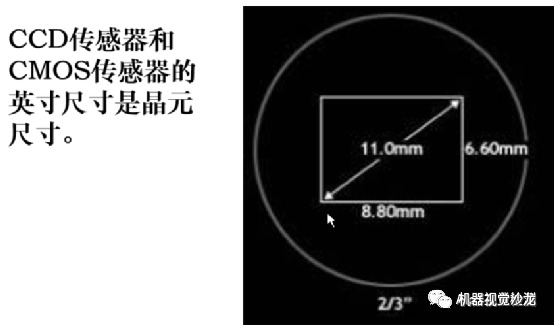
目前市面上工業相機大多是基于CCD或CMOS芯片的相機。
CCD攝像機,CCD稱為電荷耦合器件,CCD實際上是一個從圖像半導體中出來的電子有組織地儲存起來的方法。優點:圖像質量高、靈敏度高、對比度高;缺點:有Blooming現象、不能直接訪問每個像素、沒有片上處理功能。
CMOS攝像機,CMOS稱為“互補金屬氧化物半導體”,CMOS實際上只是將晶體管放在硅塊上的技術,沒有更多的含義。CMOS可以將光敏元件、放大器、A/D轉換器、存儲器、數字信號處理器和計算機接口控制電路集成在一塊硅片上。優點:體積小結構簡單、片上處理功能多、低功耗、沒有Blooming現象、能直接訪問單個像素、高動態范圍(120dB)、幀率可以更高;缺點:一致性差、光靈敏度差、噪聲大。
相對于CCD傳感器,CMOS傳感器的隨機讀取特性使其容易實現圖像的矩形感興趣區域(AOI)讀出方式。這一特性使得CMOS能針對較小的AOI時可以獲得更高的幀率。CMOS傳感器的另一優點就是,讀出速度快。CMOS傳感器的缺點是填充因子很低,通常使用微鏡來提高其填充因子。
CCD和CMOS區別:
CCD的優勢在于成像質量好;
CMOS價格比CCD便宜;
CMOS電源消耗量比CCD低;
CCD用于動態測量;
CMOS 用于低速或靜態測量。但是現在全曝光的CMOS也可用于動態測量;
現在CCD是主流,但CMOS正在趕上,而且CMOS是未來。
注:CCD是全局曝光,而CMOS既存在全局曝光又有卷簾曝光。
如何選擇工業相機:
首先要弄明白的是自己的檢測任務,是靜態拍照還是動態拍照、拍照的頻率是多少、是做缺陷檢測還是尺寸測量或者是定位、產品的大小(拍攝視野)是多少、需要達到的精度多少、所用軟件的性能、現場環境情況如何、有沒有其它的特殊要求等。
如果是動態拍照,運動速度是多少,根據運動速度選擇最小曝光時間以及是否需要逐行掃描的相機;而相機的幀率(最高拍照頻率)跟像素有關,通常分辨率越高幀率越低,不同品牌的工業相機的幀率略有不同。
根據檢測任務的不同、產品的大小、需要達到的分辨率以及所用軟件的性能可以計算出所需工業相機的分辨率;現場環境最要考慮的是溫度、濕度、干擾情況以及光照條件來選擇不同的工業相機。
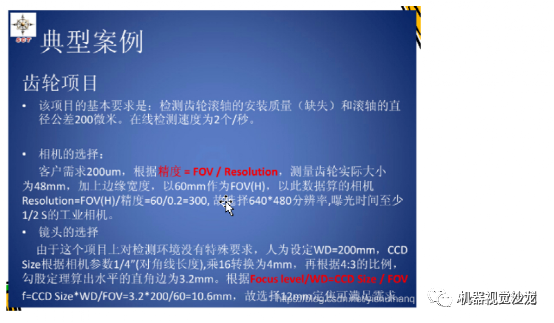
考慮待觀察或待測量物體的精度,根據精度選擇工業相機分辨率。
相機像素精度=單方向視野范圍大小/相機單方向分辨率。
則相機單方向分辨率=單方向視野范圍大小/理論精度。


實例1:
實例2:
假設檢測一個物體的表面劃痕,要求拍攝的物體大小為10*8mm,而要求的檢測精度是0.01mm。
首先假設要拍攝的視野范圍在12*10mm,那么相機的最低分辨率應該選擇在:(12/0.01)*(10/0.01)=1200*1000,約為120萬像素的相機,也就是說一個像素對應一個缺陷檢測的話那么最低分辨率必須不少于120萬像素,但市面上常見的是130萬像素的相機,因此一般而言是選用130萬像素的相機。
但實際問題是如果一個像素對應一個缺陷的話,那么這樣的系統一定會極不穩定,因為隨便的一個干擾像素點都可能被誤認為缺陷,所以為了提高系統的精準度和穩定性,最好取缺陷的面積在3到4個像素以上,這樣選擇的相機也就在130萬乘3以上,即最低不能少于300萬像素,通常采用300萬像素的相機為最佳(我見過最多的人抱著亞像素不放說要做到零點幾的亞像素,那就不用這么高分辨率的相機了。
相機的最小曝光時間,可以決定目標的運動速度。或者反過來說,目標的運動速度,對相機的最小曝光時間提出了要求。假設我們的目標運動速度是1mm/S,我們的測量精度是0.01mm/pixel,那么我們必須考慮,物體的運動引起的拖影必須要小于我們的精度0.01mm,目標移動0.01mm,需要用時10ms,這就要求我們的相機的曝光時間必須小于10ms,如果大于這個曝光時間,那么僅僅物體運動引起的模糊就會大于0.01,這時我們的精度已經無法達到0.01了。
通常來說,物體運動引起的模糊應該比我們要求的測量精度小一個數量級,這樣可以減少其對系統的影響,一般我們的工業相機最快曝光時間可以達到幾十至一百多微秒的樣子。如此短的曝光時間,對光能量要求比較大,因此需要選擇合適的光源與光源控制器。
審核編輯 :李倩
-
CMOS
+關注
關注
58文章
5976瀏覽量
237933 -
相機
+關注
關注
4文章
1428瀏覽量
54459 -
視覺檢測
+關注
關注
2文章
392瀏覽量
19727
發布評論請先 登錄
工業相機圖像采集卡:機器視覺的核心樞紐

工業相機:機器視覺的“核心之眼”,四大分類詳解

3D視覺相機遇到臟污怎么預防?富唯智能以創新技術守護工業“慧眼”

高光譜相機在工業檢測中的應用:LED屏檢、PCB板缺陷檢測

工業相機與采集卡配套方案:構建高性能機器視覺系統的核心要素

工業相機選型攻略

機器視覺系統硬件組成之工業相機篇

精密制造的革新:光譜共焦傳感器與工業視覺相機的融合
Dragonfly S 5MP工業相機量產 機器視覺應用的新選擇







 工商網監
工商網監
評論