 毫米波雷達革命,成像雷達加速自動駕駛升級
毫米波雷達革命,成像雷達加速自動駕駛升級

電子發燒友網報道(文/李寧遠)在汽車傳感里,攝像頭、雷達以及激光雷達的應用至關重要。目前的ADAS應用里,基于這三種傳感的基礎方案以及融合方案非常多,還沒有說哪一個傳感技術能夠完全占據上風,每一種技術都有自己獨特的優勢以及避不開的劣勢。
毫米波成像雷達與傳統毫米波雷達
攝像頭和激光雷達上車的優異表現催生了毫米波成像雷達的誕生,這倒不是說傳統毫米波雷達性能并不優秀。毫米波雷達作為車用傳感器里已經相對成熟的一類器件,在輔助駕駛里已經有了多年的經驗積累。對于L2+級別的汽車,毫米波雷達高分辨率帶來的穩定的點云收集是車輛完成360°環境感知的關鍵。但這還不夠,對L3、L4及以上的車型來說,車輛需要采用更高的分辨率識別更小的物體。
而且隨著自動駕駛等級的提升,傳統毫米波在技術層面的軟肋會愈發明顯。很明顯的一個軟肋就是“幽靈剎車”的誤報,這是因為傳統毫米波雷達在縱向測高能力上并不理想,會將物體錯誤感知到水平面上。這都和分辨率受限有關,這里指的是角度上的分辨率,沒有俯仰分辨率則意味著無法測量高度,仰角分辨率的不足會導致雷達忽略靜態物體,無法實現感知和自由空間映射(可行駛區域)。
成像雷達,區別于傳統毫米波雷達,受益于在角度分辨率上的提高,其對汽車可自由行駛區域映射增強了很多,實現更強大感知和自由空間映射,可以避開運動以及靜止的障礙物,更有效地消除誤報,解決“幽靈剎車”等問題。
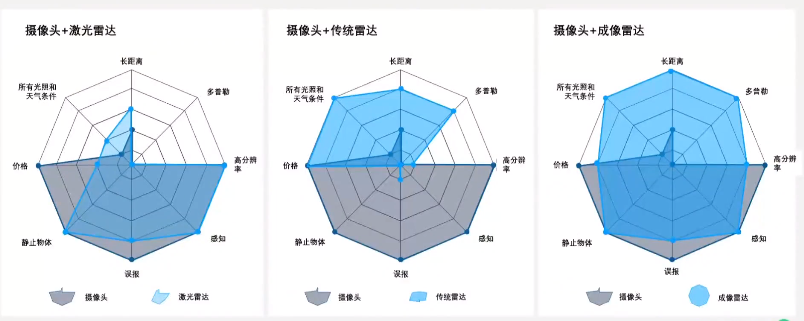
(不同融合方案優劣勢對比,Arbe)
上圖是成像雷達頭部廠商Arbe給出的不同傳感器融合之后的感知能力對比,成像雷達在高分辨率、感知以及誤報這幾項上明顯超出了傳統毫米波雷達。
成像雷達如何實現?
成像雷達實現無外乎是在硬件上增加大量的天線收發通道數量,擴大天線孔徑的同時滿足水平和垂直方向對分辨率的要求。方法并不復雜但是實現起來也并不是那么容易。
目前分辨率最高的應該是全力押寶成像雷達的Arbe,Arbe走的是將多發多收天線集成在一顆芯片,直接提供成像雷達芯片。傳統的毫米波雷達擁有12個虛擬通道,Arbe的成像雷達擁有2304個虛擬通道,配置了由48個接收通道和48個發射通道組成的專用射頻芯片組。為了解決這種量級的數據,現成的通用處理器或FPGA已經不夠用了,為此Arbe設計了專有ASIC和DSP實時處理成像雷達大量的原始數據。如此復雜的設計與遠超同行的分辨率所以其價格也是同行的數倍。
NXP、博世、TI等傳統雷達天線及芯片方案商走的是將標準雷達芯片進行多芯片級聯,以增加天線數量。今年NXP推出的專用16nm成像雷達處理器S32R45量產,基于該方案開發的4D成像雷達支持192個虛擬天線通道,可同時提供短、中、遠程三合一多模式雷達。
(成像雷達同步三光束多模探測,NXP)
此前華為發布的成像雷達采用12個發射通道,24接收通道,比常規毫米波雷達3發4收的天線配置提升24倍,其大陣列設計支持的短波形能實現120°內150米感知覆蓋,長波形則同樣能支持18°內超過300米感知覆蓋。
還有通過軟件來實現的辦法,例如Oculii的虛擬孔徑成像軟件,基于傳統的CMOS雷達芯片,可以在不需要給雷達增添更多的實體天線的前提下指數級提高傳統毫米波雷達的各項性能達到成像雷達的性能效果。
算法也是成像雷達不可忽視的關鍵點,成像雷達可以基于整體點云的方式,與后續的其他感知做前數據融合,也可以讓每個傳感器各自檢測追蹤后然后再做前數據融合,進而從算法層做場景理解。算法的加持下成像雷達不需要另外的傳感去做速度、角度等參數的測量就能實現自動運動檢測。考慮到成像雷達感知算法門檻較高,不少成像雷達供應商都會提供標準化的SDK軟件包。
小結
雖然單一傳感想要在自動駕駛傳感里獨當一面還是很困難,但成像雷達在性能各方面優異的表現的確推動了更高級別自動駕駛的發展。在成本允許的前提下,未來成像雷達、激光雷達和攝像頭形成互為冗余備份和補充的系統將是自動駕駛最合適的感知方案。
-
自動駕駛
+關注
關注
790文章
14326瀏覽量
170750 -
毫米波雷達
+關注
關注
107文章
1103瀏覽量
65399
發布評論請先 登錄
毫米波雷達在自動駕駛中有何關鍵作用?
自動駕駛毫米波雷達之間會相互干擾嗎?


毫米波雷達信號的傳輸特性
毫米波雷達與超聲波雷達的區別
康謀技術 | 高效環境感知:毫米波雷達數據采集、可視化及存儲方案








 工商網監
工商網監
評論