") 一個利用GT-SAM的緊耦合激光雷達(dá)慣導(dǎo)里程計的框架
一個利用GT-SAM的緊耦合激光雷達(dá)慣導(dǎo)里程計的框架

前言
LIO-SAM的全稱是:Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
從全稱上可以看出,該算法是一個緊耦合的雷達(dá)慣導(dǎo)里程計(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM庫中的方法。
LIO-SAM 提出了一個利用GT-SAM的緊耦合激光雷達(dá)慣導(dǎo)里程計的框架。
實(shí)現(xiàn)了高精度、實(shí)時的移動機(jī)器人的軌跡估計和建圖。
其中點(diǎn)云運(yùn)動畸變矯正的代碼在圖像投影的節(jié)點(diǎn)中

可以看到該節(jié)點(diǎn) 訂閱 3種消息:
原始點(diǎn)云數(shù)據(jù)
原始imu數(shù)據(jù)
imu預(yù)積分后預(yù)測的imu里程計數(shù)據(jù)其中完成的一個主要功能就是進(jìn)行畸變矯正。
本篇博客將解讀其畸變矯正處理流程部分。
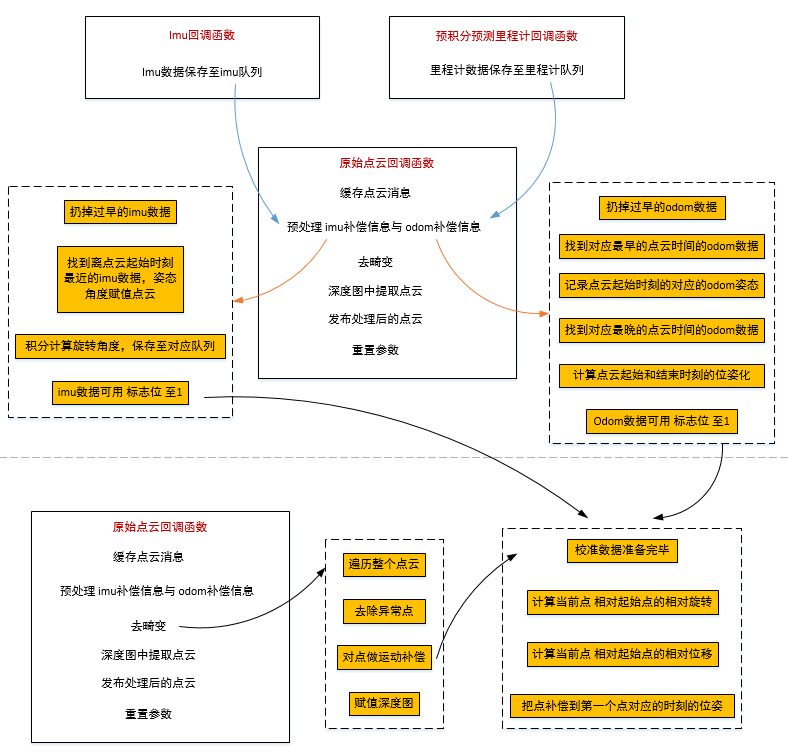
畸變矯正
將點(diǎn)云投影到一個矩陣上,并保存每個點(diǎn)的信息,并在內(nèi)部進(jìn)行畸變矯正
void projectPointCloud() {
int cloudSize = laserCloudIn->points.size(); for (int i = 0; i < cloudSize; ++i) {
遍歷整個點(diǎn)云
PointType thisPoint; thisPoint.x = laserCloudIn->points[i].x; thisPoint.y = laserCloudIn->points[i].y; thisPoint.z = laserCloudIn->points[i].z; thisPoint.intensity = laserCloudIn->points[i].intensity;
取出對應(yīng)的某個點(diǎn)
float range = pointDistance(thisPoint);
計算這個點(diǎn)距離lidar中心的距離
if (range < lidarMinRange || range > lidarMaxRange) continue;
距離太小或者太遠(yuǎn)都認(rèn)為是異常點(diǎn)
int rowIdn = laserCloudIn->points[i].ring; if (rowIdn < 0 || rowIdn >= N_SCAN) continue; if (rowIdn % downsampleRate != 0) continue;
取出對應(yīng)的在第幾根scan上
scan id 合理判斷
如果需要降采樣,就根據(jù)scan id 適當(dāng)跳過
float horizonAngle = atan2(thisPoint.x, thisPoint.y) * 180 / M_PI; static float ang_res_x = 360.0/float(Horizon_SCAN); int columnIdn = -round((horizonAngle-90.0)/ang_res_x) + Horizon_SCAN/2; if (columnIdn >= Horizon_SCAN) columnIdn -= Horizon_SCAN; if (columnIdn < 0 || columnIdn >= Horizon_SCAN) continue;
計算水平角
計算水平分辨率
計算水平線束id ,轉(zhuǎn)換到x負(fù)方向?yàn)槠鹗迹槙r針為正方向,范圍[0-H]
對水平角做補(bǔ)償,因?yàn)槔走_(dá)是順時針旋轉(zhuǎn),
對水平id進(jìn)行檢查
if (rangeMat.at(rowIdn, columnIdn) != FLT_MAX) continue;
如果這個位置有填充了就跳過
點(diǎn)云不是完全的360度,可能會多一些
thisPoint = deskewPoint(&thisPoint, laserCloudIn->points[i].time);
對點(diǎn)做運(yùn)動補(bǔ)償
rangeMat.at(rowIdn, columnIdn) = range;
將這個點(diǎn)的距離數(shù)據(jù)保存進(jìn)這個range矩陣種
int index = columnIdn + rowIdn * Horizon_SCAN;
算出點(diǎn)的索引
fullCloud->points[index] = thisPoint;
保存這個點(diǎn)的坐標(biāo)
之后來看下運(yùn)動補(bǔ)償?shù)煤瘮?shù)deskewPoint
PointType deskewPoint(PointType *point, double relTime) {
if (deskewFlag == -1 || cloudInfo.imuAvailable == false) return *point;
判斷是否可以進(jìn)行運(yùn)動補(bǔ)償,不能得話則之間返回原點(diǎn)
判斷依據(jù):
deskewFlag 是原始點(diǎn)云 沒有 time得標(biāo)簽 則為-1
cloudInfo.imuAvailable 的原始imu里面的數(shù)據(jù)判斷
double pointTime = timeScanCur + relTime;
relTime 是相對時間,加上起始時間就是絕對時間
float rotXCur, rotYCur, rotZCur; findRotation(pointTime, &rotXCur, &rotYCur, &rotZCur);
通過findRotation函數(shù) 計算當(dāng)前點(diǎn) 相對起始點(diǎn)的相對旋轉(zhuǎn)
其內(nèi)部為:
void findRotation(double pointTime, float *rotXCur, float *rotYCur, float *rotZCur) { *rotXCur = 0; *rotYCur = 0; *rotZCur = 0;
先將相對旋轉(zhuǎn)至0
int imuPointerFront = 0; while (imuPointerFront < imuPointerCur) { if (pointTime < imuTime[imuPointerFront]) break; ++imuPointerFront; }
找到距離該點(diǎn)云時間最近的 大于該點(diǎn)云時間的點(diǎn)
if (pointTime > imuTime[imuPointerFront] || imuPointerFront == 0) { *rotXCur = imuRotX[imuPointerFront]; *rotYCur = imuRotY[imuPointerFront]; *rotZCur = imuRotZ[imuPointerFront]; }
如果時間戳不在兩個imu的旋轉(zhuǎn)之間,就直接賦值了
} else { int imuPointerBack = imuPointerFront - 1; double ratioFront = (pointTime - imuTime[imuPointerBack]) / (imuTime[imuPointerFront] - imuTime[imuPointerBack]); double ratioBack = (imuTime[imuPointerFront] - pointTime) / (imuTime[imuPointerFront] - imuTime[imuPointerBack]); *rotXCur = imuRotX[imuPointerFront] * ratioFront + imuRotX[imuPointerBack] * ratioBack; *rotYCur = imuRotY[imuPointerFront] * ratioFront + imuRotY[imuPointerBack] * ratioBack; *rotZCur = imuRotZ[imuPointerFront] * ratioFront + imuRotZ[imuPointerBack] * ratioBack; }
否則 作一個線性插值,得到相對旋轉(zhuǎn)
算兩個權(quán)重 進(jìn)行 插值
float posXCur, posYCur, posZCur; findPosition(relTime, &posXCur, &posYCur, &posZCur);
這里沒有計算平移補(bǔ)償 如果運(yùn)動不快的話
if (firstPointFlag == true) { transStartInverse = (pcl::getTransformation(posXCur, posYCur, posZCur, rotXCur, rotYCur, rotZCur)).inverse(); firstPointFlag = false; }
計算第一個點(diǎn)的相對位姿
Eigen::Affine3f transFinal = pcl::getTransformation(posXCur, posYCur, posZCur, rotXCur, rotYCur, rotZCur); Eigen::Affine3f transBt = transStartInverse * transFinal;
計算當(dāng)前點(diǎn)和第一點(diǎn)的相對位姿
newPoint.x = transBt(0,0) * point->x + transBt(0,1) * point->y + transBt(0,2) * point->z + transBt(0,3); newPoint.y = transBt(1,0) * point->x + transBt(1,1) * point->y + transBt(1,2) * point->z + transBt(1,3); newPoint.z = transBt(2,0) * point->x + transBt(2,1) * point->y + transBt(2,2) * point->z + transBt(2,3); newPoint.intensity = point->intensity; return newPoint;
就是R*p+t ,把點(diǎn)補(bǔ)償?shù)降谝粋€點(diǎn)對應(yīng)的時刻的位姿
然后看提取出有效的點(diǎn)的信息 函數(shù)cloudExtraction
void cloudExtraction() {
for (int i = 0; i < N_SCAN; ++i) {
遍歷每一根scan
cloudInfo.startRingIndex[i] = count - 1 + 5;
這個scan可以計算曲率的起始點(diǎn)(計算曲率需要左右各五個點(diǎn))
for (int j = 0; j < Horizon_SCAN; ++j) {
遍歷該 scan上的每 個點(diǎn)
if (rangeMat.at(i,j) != FLT_MAX)//FLT_MAX就是最大的浮點(diǎn)數(shù) {
判斷該點(diǎn) 是否 是一個 有效的點(diǎn)
rangeMat的每個點(diǎn)初始化為FLT_MAX ,如果點(diǎn)有效,則會賦值為 range
cloudInfo.pointColInd[count] = j;
點(diǎn)云信息里面 這個點(diǎn)對應(yīng)著哪一個垂直線
cloudInfo.pointRange[count] = rangeMat.at(i,j);
點(diǎn)云信息里面 保存它的距離信息
extractedCloud->push_back(fullCloud->points[j + i*Horizon_SCAN]);
他的3d坐標(biāo)信息
cloudInfo.endRingIndex[i] = count -1 - 5;
這個scan可以計算曲率的終端
在上面處理完后
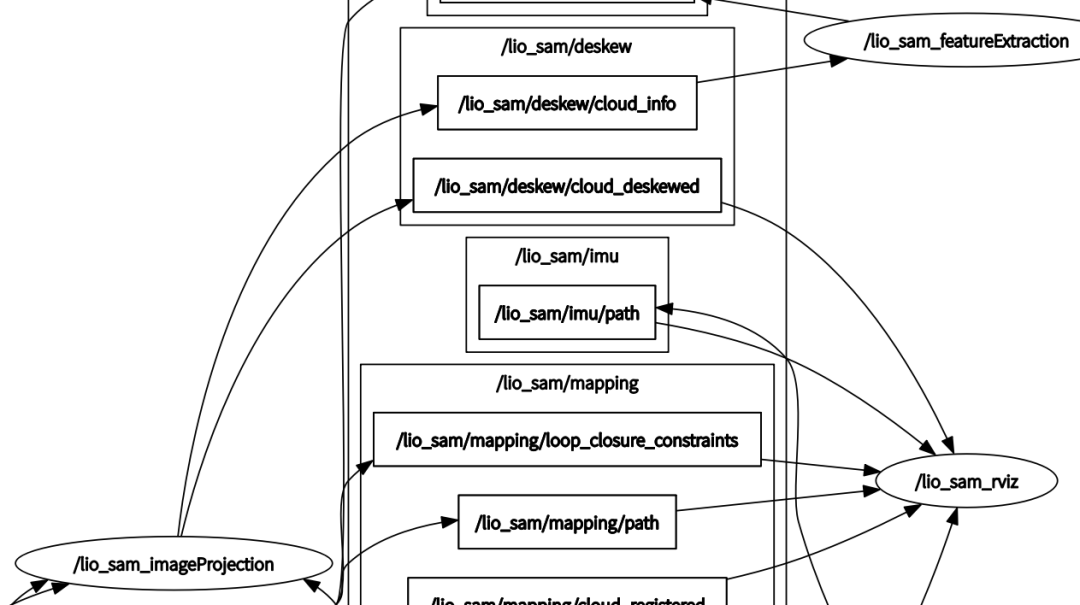
即可發(fā)布點(diǎn)云
void publishClouds() { cloudInfo.header = cloudHeader; cloudInfo.cloud_deskewed = publishCloud(&pubExtractedCloud, extractedCloud, cloudHeader.stamp, lidarFrame); pubLaserCloudInfo.publish(cloudInfo); }
最后將處理后的點(diǎn)云發(fā)布出去
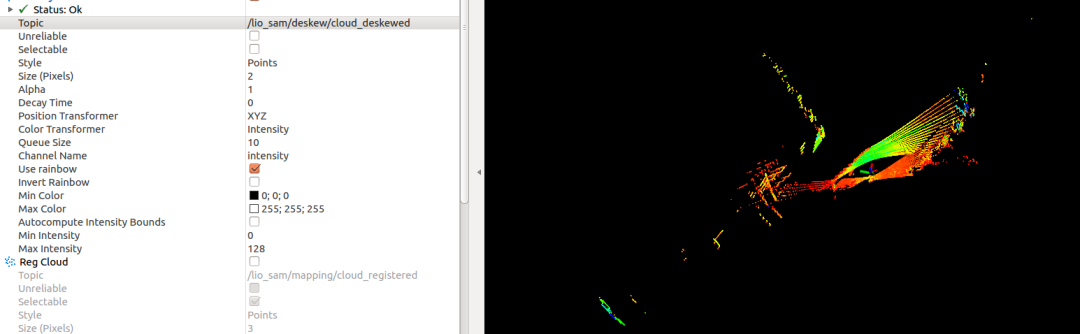
result

審核編輯:劉清
-
3D
+關(guān)注
關(guān)注
9文章
2955瀏覽量
110438 -
SAM
+關(guān)注
關(guān)注
0文章
114瀏覽量
33861 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4217瀏覽量
192359
原文標(biāo)題:LIO-SAM點(diǎn)云預(yù)處理前端:畸變矯正
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
超酷的樹莓派激光雷達(dá)掃描儀!

一種新型激光雷達(dá)慣性視覺里程計系統(tǒng)介紹

極氪007GT搭載禾賽ATX激光雷達(dá)上市
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
科普:一文了解固態(tài)和半固態(tài)激光雷達(dá)
一字線光斑激光雷達(dá),開拓創(chuàng)新應(yīng)用賽道?
激光雷達(dá)在SLAM算法中的應(yīng)用綜述

激光雷達(dá)會傷害眼睛嗎?

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)技術(shù)的發(fā)展趨勢
LIDAR激光雷達(dá)逆向建模能用到revit當(dāng)中嗎
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
一文看懂激光雷達(dá)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論